无刷电机有感方波闭环控制
无刷电机有感方波闭环控制
前面已经实现了无刷电机的六步换向控制以及三相电流采集、电压温度采集。本章将学习如何利用PID实现速度环闭环控制和速度+电流双闭环控制。
速度闭环控制
想要实现速度闭环,必须知道此时的速度大小。所以要先知道无刷电机是如何测速的。
无刷电机测速原理
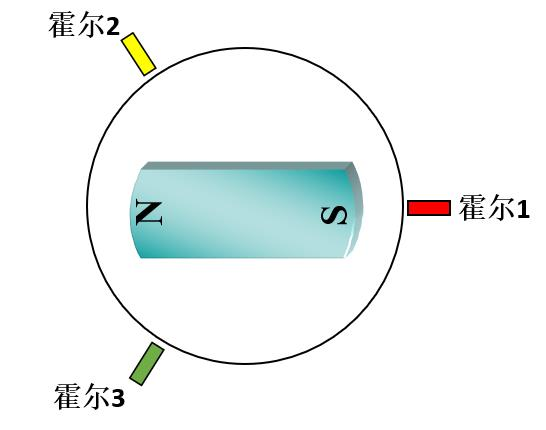
根据前面学习到的霍尔传感器在转子N极靠近时候输出1,S极靠近时候输出0。
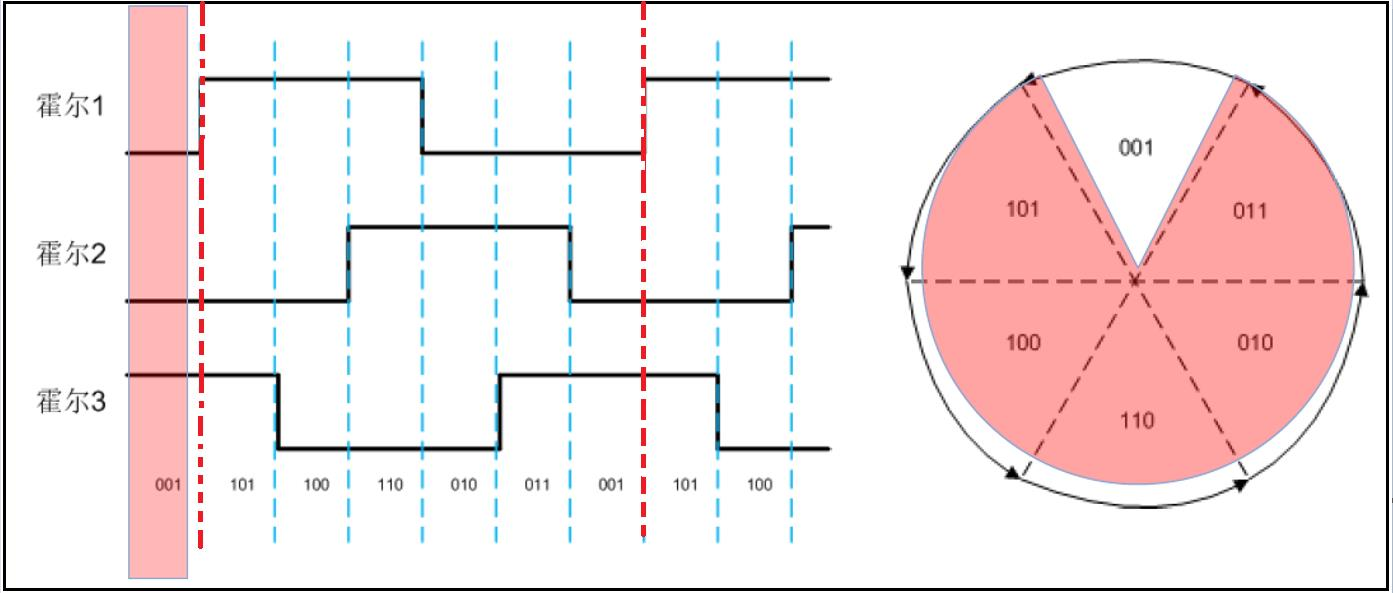
1:当只有一对级,转子转一圈,霍尔输出一个完整脉冲(高电平与低电平时间分别为180电角度。)
2:计算其中高电平的持续时间,其中:t = C/F_t,F_t为计数频率。C为高电平的计数次数。因为计数频率就是一秒中数多少次。C次表示计数高电平的次数。所以可以得到高电平持续的时间。这里需要注意一下,因为当出现上升沿时候,就是低电平转为高电平的时候,一定是另一个半圈的开始。所以此时统计高电平持续的时间就是刚好一对极情况半圈的时间。
换句话来说霍尔信号的上升沿 / 下降沿定义了半圈的边界 → 计数频率和计数次数测量出边界内的时间(半圈时间) → 进而推算出 1 圈时间和转速。
3:所以转一圈的时间为:T=2*C/F_t。此时单位秒/圈。倒数即为圈/秒,转换为RPM即为:F_t/2C * 60。当为两对极时候,也就是高电平的时间会翻倍。所以变为:F_t/4C * 60。
速度环
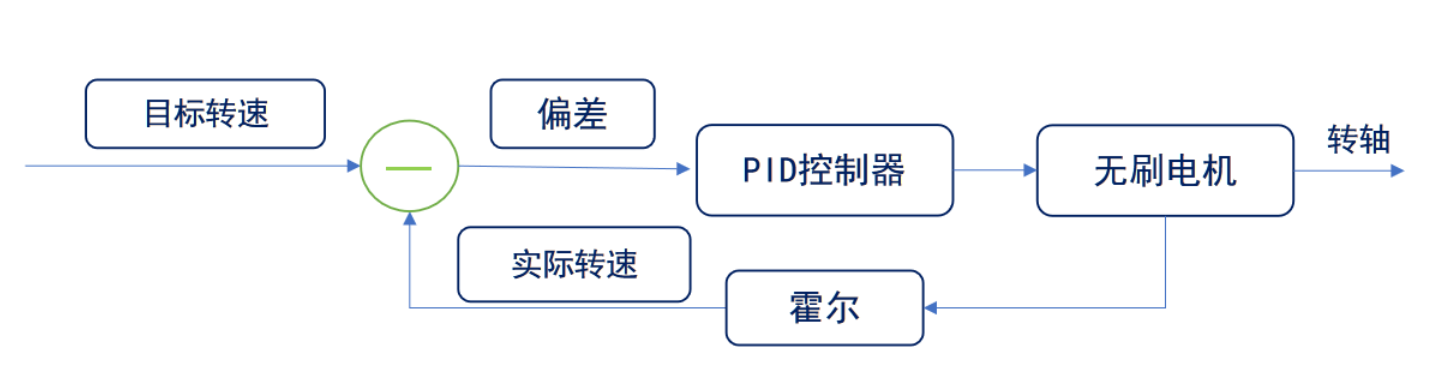
速度环如上图所示:通过霍尔计算出来实际转速,然后设定目标转速。两者存在偏差,然后输入PID控制器,输出结果给无刷电机。