基于 3D 高斯泼溅的重建 (3DGS-based)
3DGS (3D Gaussian Splatting) 是比 NeRF 更晚出现的技术,它在保持高质量渲染的同时,极大地缩短了训练时间并实现了实时渲染 。
核心思想:与 NeRF 使用隐式的神经网络不同,3DGS 用一组离散的、可优化的 3D 高斯函数来显式地表示场景 。每个高斯函数都有位置、形状(各向异性协方差)、颜色和不透明度,球谐函数(SH)系数等属性 。渲染时,这些 3D 高斯函数被“泼溅”(Splatting) 到 2D 图像平面上,并通过 alpha-blending 混合成最终的图像
(1)
这个公式的用途是什么? 它的作用是定义场景中的一个基本元素——一个“三维高斯体”。你可以把它想象成一个在三维空间中的、半透明的、有形状的“能量团”或“棉花糖”。整个三维场景就是由成千上万个这样的“高斯体”组合而成的。这个公式告诉我们,在空间中的任意点 x,它受这个高斯体的影响有多大(或者说密度有多高)。
公式拆解:
- G(x):这是函数的输出。它表示在三维空间中的点 x 处,这个高斯体的“密度”或者“强度”值。这个值是一个标量(一个数字)。
- x:代表三维空间中的任意一个点,是一个三维向量 (x, y, z)。
- μ (mu):这是这个高斯体的中心点(mean),也是一个三维向量 (μx, μy, μz)。这个点是高斯体密度最高的地方。
- Σ (Sigma):这是一个 3x3 的协方差矩阵 (covariance matrix)。这是最关键的部分,它描述了这个高斯体的 形状、大小和朝向。
- 如果 Σ 是一个对角矩阵(只有对角线上有值),那么这个高斯体就是一个轴对齐的椭球体,对角线上的值分别控制它在 x, y, z 三个轴上的“胖瘦”(即缩放)。
- 如果 Σ 是一个更复杂的矩阵,比如除了对角线,在矩阵其他位置也有值,它还能描述这个椭球体的旋转。所以,通过 Σ,这个“棉花糖”可以被任意地拉伸、压缩和旋转。
\Sigma^{−1}:Σ 的逆矩阵。
- (x−μ):这是一个从高斯中心 μ 指向点 x 的向量。它描述了点 x 相对于高斯中心的距离和方向。
- (x−μ)^TΣ^{−1}(x−μ):这部分在数学上被称为“马氏距离的平方 (squared Mahalanobis distance)”。你可以把它理解为一种“考虑了高斯体形状的距离”。如果一个点沿着椭球体“长轴”方向偏离中心,即使物理距离很远,这个值也可能不大;但如果它沿着“短轴”方向偏离中心,即使物理距离很近,这个值也可能很大。
- e−...:指数函数。它的特性是,当括号里的值为 0 时(即 x=μ,在中心点),函数值为 e0=1 (最大值);当 x 离中心点 μ 越远,括号里的值越大,整个函数值就以指数形式快速衰减并趋近于 0。
(2) Rendering
为了将由3D高斯函数组成的场景渲染到2D图像空间中,3DGS采用了 splatting 光栅化技术。
a) 3DGS设计了一种基于tile的光栅化器。屏幕首先被划分为tile(例如,16×16像素),每个高斯会根据它们重叠的tile数量进行实例化,并被分配一个记录视图空间深度和tile ID的键。然后,高斯会根据其深度进行排序,这使得光栅化器能够正确处理遮挡和重叠的几何图形。
- 单个采样点的不透明度计算:

这个公式的用途是什么? 当我们要渲染一个像素时,我们会从相机(眼睛)发射一条光线穿过场景。这条光线会穿过很多高斯体。这个公式计算的是,当光线前进一小步(一个间隔 δi)时,在那个点上由高斯体产生的 不透明度 (alpha, α)。不透明度的值在 0 到 1 之间,0 代表完全透明,1 代表完全不透明。
- αi:第 i 个采样点的不透明度。
- σi (sigma):这是第 i 个采样点的 密度 (density)。这个密度值是从高斯体在那个点的属性中计算出来的。σ 越大,说明那个地方的“物质”越密集,光线越难穿过。
- δi:这是光线上传播的微小距离间隔 (interval)。可以理解为从上一个采样点到当前采样点的距离。
- σiδi:密度乘以距离。在体积渲染中,这代表了光线在这段微小距离中衰减的程度,可以理解为“光学厚度 (optical thickness)”。
- exp(−σiδi):这计算的是 透过率 (transmittance),即有多少比例的光能够成功穿过这一小段距离而不被吸收或散射。
- 1−exp(...):既然 exp(...) 是穿过去的比例,那么用 1 减去它,剩下的就是 被阻挡的比例,这正是“不透明度”的定义。
- 最终像素颜色的混合渲染:
这个公式的用途是什么? 这是最终的渲染公式。它将光线上所有采样点(i∈N)的颜色和不透明度进行 从前到后 的混合,最终计算出这个像素应该显示的颜色。
C_{color}:这是最终计算出的像素颜色,是一个 RGB 向量。
∑_{i∈N}表示对光线路径上所有采样点(从最靠近相机的 i=1 开始,一直到最远的 N)的贡献进行求和。
ci:第 i 个采样点的颜色,是一个 RGB 向量。这个颜色也是从高斯体的属性中获取的。
αi:第 i 个采样点的不透明度,由我们刚刚分析的公式计算得出。
ciαi:将第 i 个点的颜色乘以它的不透明度。这代表了 这个点本身能贡献出的颜色量。一个很亮但很透明的点,贡献的颜色也很少。
∏_{j=1}^{i−1}(1−α_j):这是最核心的 累积透过率 (accumulated transmittance) 部分。
∏ 是连乘符号。
(1−αj):这是第 j 个点(在当前点 i 前面的某个点)的 透过率。如果 αj 是不透明度,那么 1−αj 就是光能通过的比例。
∏_{j=1}^{i−1}(1−α_j):它将从相机开始,到当前点 i之前 的所有点 (j=1 到 i−1) 的透过率全部乘起来。这个结果代表了 有多少光能够毫发无损地穿过前面所有的遮挡物,最终到达第 i 个点。
将所有部分组合起来理解: 对于光线上的第 i 个点,它的颜色贡献是: 该点的颜色(c_i) × 该点的不透明度(α_i) × 光线能到达该点的比例(累积透过率)
最后,∑ 符号将所有点(从前到后)的颜色贡献全部累加起来,就得到了这个像素的最终颜色。前面的点因为累积透过率高(路径上遮挡少),对最终颜色的贡献权重更大;后面的点因为光线被前面消耗了很多,所以贡献的权重就更小。这完美地模拟了物体之间互相遮挡的效果。
(3) Optimization
在前一步“渲染 (Rendering)”中,我们使用一组固定的高斯体参数(位置、形状、颜色、不透明度)来生成一张图像。 而“优化”这一步的目的,就是要 找到最优的那组参数,使得渲染出来的图像和真实的训练照片(Ground Truth)尽可能地一模一样。这通过随机梯度下降去更新高斯的可学习参数(位置 μ、形状/协方差Σ、颜色/SH 系数、密度等)。
两件初始化/训练上的事
- 协方差初始化:一开始把每个高斯设成各向同性\Sigma=s^2 I,其中 s取“到最近 3 个点的平均距离”。这样半径与点云局部密度匹配,不会太小漏掉,也不会太大糊一片。
- 学习率调度:对位置参数使用“指数衰减”的学习率(类似 Plenoxels 的做法)。直觉:前期步子大,快速把高斯移到合适位置;后期步子小,微调避免抖动。其他参数可以用更平稳或常数学习率。
混合损失函数 (Combined Loss Function)
这个公式的用途是什么? 这是一个总的损失函数,它将两种不同的“差异”评估方法——L1 和 LD-SSIM——聪明地结合在了一起。它不是只用一种标准来评判“像不像”,而是综合了两种标准的优点。
公式拆解:
- L:最终的总损失值。我们的优化目标就是让这个 L 越小越好。
- L1:即 L1 损失,它主要关注 像素级别的绝对颜色差异。
- LD-SSIM:即 D-SSIM 损失。它主要关注 图像的结构、纹理和对比度等感知上的相似性,更符合人眼的判断。
- λ (lambda):这是一个超参数(人为设定的一个值,通常在0到1之间),它充当一个 “平衡旋钮”。
- 如果 λ 很大(比如 0.8),就意味着我们更看重 LD-SSIM,希望渲染图在结构上更像真照片。
- 如果 λ 很小(比如 0.2,这是论文中常用的值),就意味着我们更看重 L1,希望渲染图在每个像素的颜色上都精确匹配。
L1 损失 (L1 Loss)
这个公式的用途是什么? 它用最直接的方式计算两张图的差异:逐个比较每个像素的颜色,然后将所有差异加起来求平均。
公式拆解:
N:图像中的总像素数量。。
gi:第 i 个像素在 ground truth(真实照片)中的颜色值(通常是一个RGB向量)。
ri:第 i 个像素在 rendered(渲染图像)中的颜色值。
∣gi−ri∣:计算两个像素颜色值的 绝对差。例如,如果真实像素是 (255, 0, 0) (红色),渲染像素是 (250, 10, 0),绝对差就是 (5, 10, 0)。取绝对值是为了避免正负差异相互抵消。
1/N∑. .:将所有像素的绝对差加起来,再除以总像素数 N,得到 平均绝对误差 (Mean Absolute Error, MAE)。
D-SSIM 损失 (Dis Structural Similarity Loss)

这个公式的用途是什么? 这个公式看起来很复杂,但它的核心思想是:模仿人类视觉系统来判断两张图片的相似度。人眼对像素的绝对值差异不敏感,但对亮度、对比度和结构的变化非常敏感。SSIM(结构相似性指数)就是为此设计的。而 LD-SSIM 就是 1 - SSIM,即结构“不”相似度,我们希望这个不相似度最小。
这个计算不是针对单个像素,而是针对图像中的一个个“局部窗口 (local windows)”(比如 8x8 的小方块)进行的。
公式拆解:
首先,后面那个巨大的分数部分,计算的是单个窗口的 SSIM 值。SSIM 值越接近 1,代表两个窗口越相似。
μg 和 μr:分别代表真实图像窗口和渲染图像窗口的像素 平均强度(均值)。这部分用于比较两者的 亮度 (Luminance)。
σg2 和 σr2 :分别代表两个窗口的像素 方差 (Variance)。方差衡量了数据的离散程度,在这里可以理解为图像的 对比度 (Contrast)。
σgr :代表两个窗口的 协方差 (Covariance)。它衡量了两个窗口像素值的线性关系,可以理解为对 结构信息 (Structure) 的比较。
c1 和 c2:两个很小的常数。它们的作用是增加分母的稳定性,防止当分母接近于 0 时(例如在一个纯黑色的窗口里,μ 和 σ 都可能为0)出现计算错误。
... :将图像划分为 M 个窗口,分别计算每个窗口的 SSIM 值,然后求平均,得到整张图的平均 SSIM。
1−...:用 1 减去平均 SSIM 值。这样,如果两张图完全一样(SSIM=1),损失值 LD-SSIM 就为 0,这正是我们想要的优化目标。
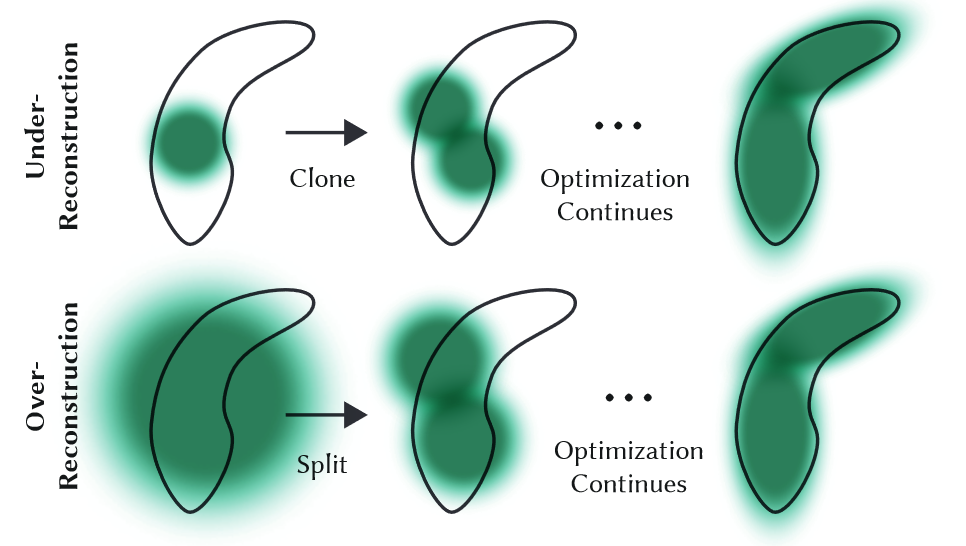
(4) Densification and Culling
densification 和剔除。为了确保能够优化场景的足够细节和精确重建,3DGS 在优化过程中融入了 densification 和剔除操作。具体来说,3DGS 每 100 次迭代进行一次 densification,并移除所有本质上透明的高斯体,即不透明度 α 小于阈值 εα 的高斯体。