卫星通信天线的跟踪精度,含义、测量和计算
卫星通信天线的跟踪精度,含义、测量和计算
在上一个章节卫星通信天线的指向精度,含义、测量和计算,我们介绍了天线的指向精度。今天我们来说一说卫星通信天线的另一个重要参数指标:跟踪精度。
什么是跟踪精度
天线的跟踪精度是指在动态过程下,天线伺服控制系统能否实时、稳定地对准目标卫星的能力。通俗地说,就是:
“当目标在动,或者天线在动时,能否‘粘住’目标?”
跟踪精度通常用角偏差的统计值(如RMS或最大瞬时偏差)来表示,单位为角度(°)。
天线在什么场景下需要跟踪卫星?
经常会有下面这样的问题:
问题1:是不是动中通天线才需要考虑跟踪精度,对准地球同步卫星的静中通天线不需要考虑跟踪精度?
问题2:如果卫星(或者目标)和天线,有一个是运动的,那天线就需要跟踪,就有跟踪精度的指标?
其实天线在什么场景下需要跟踪卫星,并不取决于天线本身是“动”还是“静”,而取决于天线的波束宽度(HPBW)与目标的相对角运动幅度之间的关系。
工程上一般这样认为:如果目标的运动会导致天线指向偏离超过其波束宽度的10%~20%,就必须采用天线自动跟踪系统,此时跟踪精度也就成为一个核心考核指标。
下面我们举例说明:
抛物面天线的波束宽度可以用下面的近似公式表示:
θ ≈ 70 * λ / D
其中:
-
•
θ是波束宽度(单位:度) -
•
λ是工作波长(单位:米) -
•
D是天线口径(单位:米)
相控阵天线的波束宽度,可以查阅厂家提供的产品规格书和测试报告,比如市场上某厂家的相控阵天线,在离轴角=0度的时候,3dB波束宽度是5°。
在不同离轴角条件下的测试结果如下:
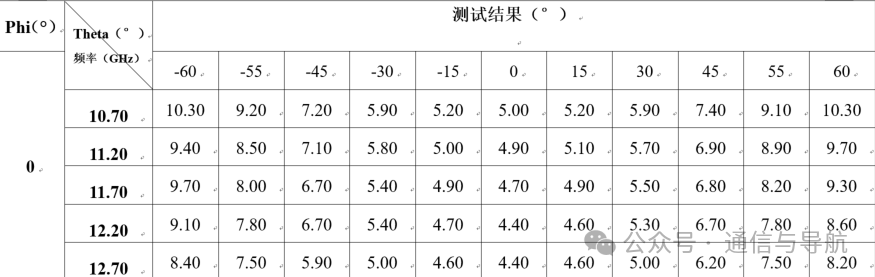
不同离轴角条件下的天线波束宽度
基于上面的原则,我们考虑下面几个主要的场景:
场景一:天线静止,卫星在运动
主要是针对低轨(LEO)和中轨(MEO)卫星,LEO卫星和MEO卫星相对于地面高速运动,卫星从地平线升起到落下只有几分钟到几十分钟。
地面天线必须能够平滑、快速、且精确地跟踪卫星。任何跟踪上的滞后或抖动都会导致信号质量急剧下降,甚至中断。天线的跟踪精度决定了在卫星过境期间,通信链路是否能被稳定地保持。
场景二:大口径固定站跟踪GEO卫星
对于地球同步卫星来说,情况有一点复杂。
其实地球同步卫星(GEO卫星),相对地球来说,并不是完全静止的固定在某个位置上。相反,GEO卫星在一定范围内存在轨道扰动。这个扰动的范围通常在 ±0.1°以内 。对于地面观察者来说,卫星在24小时内会在天空中画一个微小的“8”字。
对于小口径地面天线,比如1.2m的地面天线,假设工作在Ku频段(频率是12GHz,对应波长是0.025m),计算得到的波束宽度是
θ ≈ 70 * 0.025 / 1.2 ≈ 1.5°
GEO卫星的轨道漂移(±0.1°)相对于1.5°的波束宽度,基本上不会造成天线增益的严重下降,因此小口径的地面天线一般采用如下的方式对准卫星:
-
• 初始阶段进行程序跟踪,将天线波束指向角对准卫星;
-
• 对准之后,伺服机构停止工作,只有在需要切换卫星的时候再次启动伺服机构。
**对于大口径的地面站天线,**比如10米口径的大型固定站天线,假设工作在Ku波段(频率是12GHz,波长是0.025m),计算得到的波束宽度是:
θ ≈ 70 * 0.025 / 10 ≈ 0.175°
GEO卫星的漂移(±0.1°)和0.175°的波束宽度基本相当,卫星的漂移会引发天线增益的严重下降,所以对于大口径地面站天线来说,如果仅仅依靠程序跟踪+静态对准,并不能保证正常的通信质量。
在日常运行中,大口径地面站通常采用自动跟踪模式(如单脉冲跟踪)来实时补偿卫星漂移,ACU会周期性地或根据信号质量指示(如AGC电压下降)触发跟踪调整过程。
这个过程日夜不停,目的就是为了补偿卫星在0.1°范围的缓慢漂移。

权威标准
**国际通信卫星组织(Intelsat)**的
-
• IESS-207 标准中明确规定:对于Ku波段,天线口径大于等于 3.5米 的地球站,必须具备自动跟踪能力
-
• Intelsat IESS-308 (C-Band)中规定:对于C波段,口径大于等于7.0米的C频段标准A站(Standard A)地球站,必须具备自动跟踪能力
-
• Intelsat IESS-601 (Ka-Band)中规定,口径大于等于1.2米的天线就推荐或必须具备自动跟踪能力,尤其对于大型关口站(通常大于3.5米),自动跟踪是毫无疑问的强制性要求。
场景三:目标静止,但天线在运动(动中通)
这是“动中通”(Satcom On-The-Move, SOTM)的典型场景,天线安装在移动的载体上,跟踪地球同步卫星。
天线的伺服系统不仅要对准卫星,更要实时抵消载体自身运动(摇摆、颠簸、转向)带来的影响。
场景四:天线和目标都在运动
天线安装在运动载体上,跟踪的是低轨卫星或者中轨卫星。
天线跟踪误差的来源
天线跟踪误差的来源主要有以下几个:
-
• 外部环境造成的误差
-
• 伺服系统自身误差
-
• 信号载噪比
-
• 卫星星历模型误差
外部环境造成的误差
外部环境造成的误差主要包括:
-
• 天线在遇到风力的时候,风压会使天线结构产生一个偏移的力矩,如果伺服机构产生的扭矩不足或者不能稳定抵消风力的影响,天线就会产生一个持续的指向偏差,特别是遇到随机高频的阵风的时候。
-
• 大气传播效应,无线电波穿过大气层发生折射,特别是仰角较低的时候折射的影响更加显著。折射效应会使得卫星的“表现出来的”位置和真实的几何位置存在偏移,进而引起跟踪误差。
伺服系统自身的误差
伺服系统的误差包括:机械结构误差、控制环路误差和传感器误差等。
机械结构误差:
-
• **电机和齿轮:**驱动电机和齿轮箱之间存在机械间隙。当电机反转时,需要走过这段间隙才能真正带动天线,这会导致响应延迟和控制死区,尤其在低速或频繁反向修正时影响显著。
-
• 结构形变: 长时间暴露在室外的地面天线,由于风力负载,温度变化引起热胀冷缩,天线反射面、背架结构以及馈源支撑臂等部分会产生微小的物理变形,从而改变天线的的相位中心和天线指向,从而引入跟踪误差。
-
• **天线底座不平:**方位轴和俯仰轴的不垂直度(正交误差)、轴承的径向和轴向跳动等。这些误差会使得天线的实际运动和理论模型不符。
控制环路误差:
-
• 伺服带宽限制: 任何伺服系统的响应速度都是有限的。对于超过其响应带宽的快速干扰(如高频阵风)或目标运动(如快速过境的LEO卫星),系统会因“跟不上”而产生滞后误差。
-
• 跟踪算法的误差: 不同的跟踪算法会引入不同类型的误差。
传感器误差:
-
• 角度编码器误差: 编码器在伺服系统中,用于报告天线的精确角度。编码器的分辨率、安装偏心、量化误差等会直接转化为指向读数误差。
-
• 惯性测量单元的误差:IMU(陀螺仪、加速度计)的零位漂移、零偏稳定度、刻度因子误差、噪声等,会导致姿态基准的偏差。
信号载噪比
高载噪比是高精度跟踪的基础。载噪比越低,跟踪误差越大,跟踪稳定性越差,甚至导致完全失锁。
卫星星历模型误差
在卫通天线对星之:低轨卫星跟踪中我们介绍了,在跟踪低轨卫星或中轨卫星的时候,天线的跟踪方式是程序跟踪+载波跟踪。天线通过下载的星历信息预测未来一段时间卫星的位置,然后利用计算的卫星位置,计算天线的指向。
如果用于程序跟踪的卫星轨道参数(星历)本身就存在一定的预报误差,并且会随着时间推移而累积。这些预报位置与卫星真实位置之间的偏差,会直接构成程序跟踪模式下的跟踪误差。
天线跟踪精度的测量和计算
天线跟踪精度最常用的是基于卫星信标的测量方法。利用目标卫星发射的未调制的单载波信标信号作为跟踪源。天线伺服系统工作在自动跟踪模式(如单脉冲或圆锥扫描),跟踪接收机(信标机)实时输出信标信号的功率,或者频谱仪实时监测记录信标信号的功率。
具体跟踪精度的测量和计算方法,我们在动中通天线跟踪性能指标测试中有详细介绍,现在把主要内容用流程图表示如下:
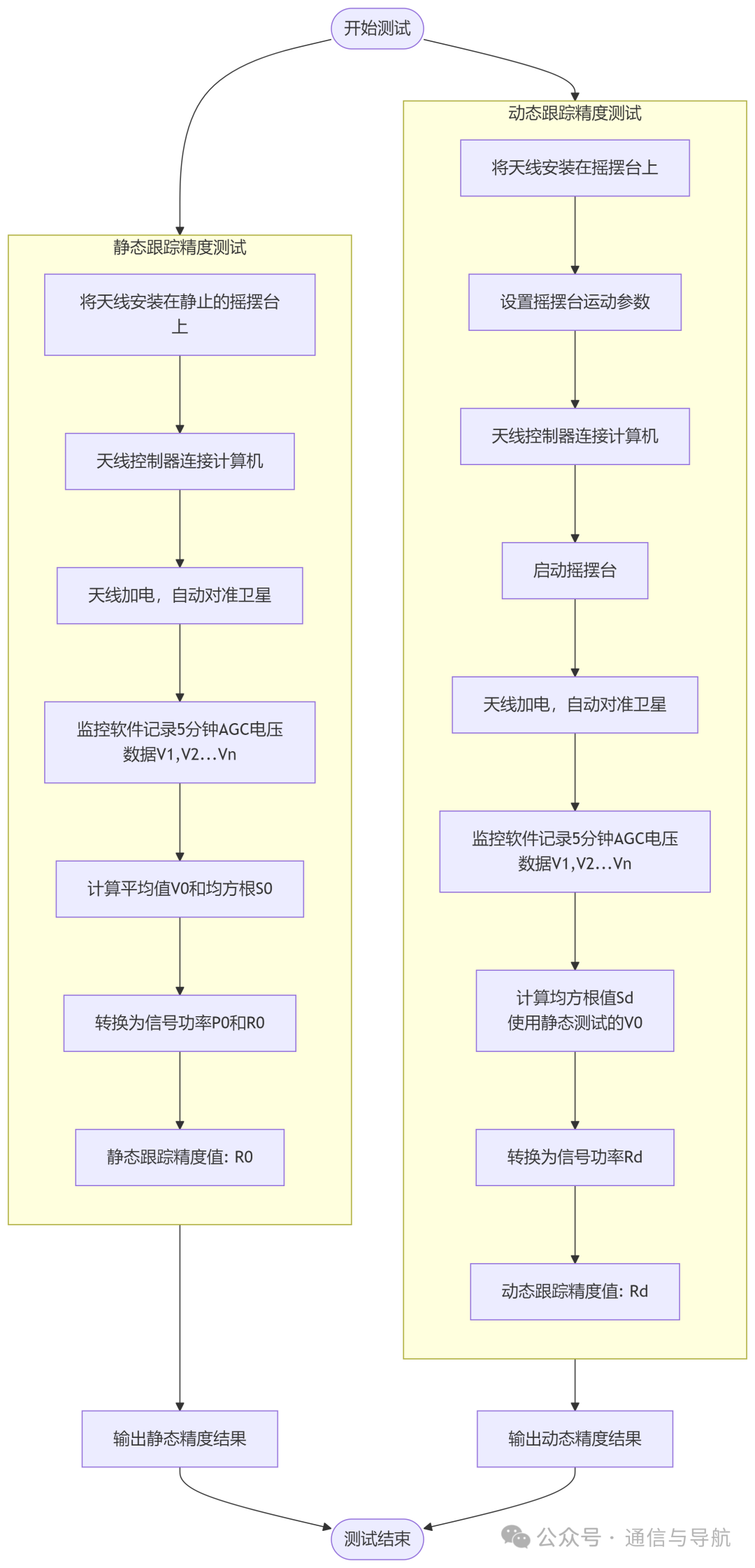
跟踪精度测试 测量得到的是基于功率波动(单位是dBm),能够间接反映跟踪精度。为了得到以角度为单位的天线跟踪精度,需要通过已知的天线方向图参数(特别是主波束3dB范围内的放线图)换算成角度误差的均方根值(°)。
跟踪精度和指向精度
最后我们来总结一个跟踪精度和指向精度的差异对比。
| 对比维度 | **指向精度 ** | 跟踪精度 |
| 核心性质 | 静态 / 准静态 | **动态 ** |
| 衡量目标 | 天线指向一个理论计算出的固定坐标的能力。衡量的是“瞄得有多准”。 | 天线伺服系统实时跟随一个实际目标(可能在运动)的能力。衡量的是“跟得有多稳”。 |
| 工作状态 | 通常在开环状态下评估,即不依赖实时信号反馈,仅凭指令和自身位置传感器进行定位和指向。 | 在闭环状态下评估,即系统根据实时的卫星信标信号反馈,不断修正天线的方位和俯仰位置。 |
| 关键系统 | 主要取决于天线的机械结构、安装基座的稳固性、角度传感器的分辨率和初始校准的准确性。 | 主要取决于伺服控制系统的性能,包括ACU(天线控制器)的算法、电机响应速度、系统带宽和信标接收机的灵敏度。 |
| 主要误差源 | 安装失准、重力/热变形、结构误差、编码器静态误差。 | 阵风、平台运动、伺服结构、信号噪声(低C/N)、环路控制误差、传感器误差,卫星星历误差。 |
| 应用场景 | 1. 所有天线的初始安装与校准。 | 1. 动中通天线(车载、船载、机载)的核心指标。 |
一句话,指向精度是静态的“瞄准卫星”能力,而跟踪精度是动态的“跟随卫星”能力。
总结
在卫星通信中,天线跟踪精度直接关系到:
-
• 动中通 通信的稳定性,如车载、舰载、机载;
-
• 大口径地面站的长期稳定性;
-
• 低轨卫星通信链路的可靠性;
-
• 天线是否能在恶劣天气、复杂环境中仍然保持通信不中断。
推荐阅读:
Starlink卫星终端对星策略是终端自主执行的还是网管中心调度的?
Starlink第三代终端和第二代终端的差异性有哪些?