机器视觉的智能手表后盖激光打标应用
在当今科技飞速发展的时代,智能手表已经从简单的计时工具转变为集健康监测、通讯、支付等多功能于一体的智能穿戴设备。其中智能手表的后盖打标是生产中不可或缺的一环,传统的打标方式往往依赖模具和机械定位,不仅成本高昂、周期长,而且难以满足消费者对独特设计和快速交付的期望。激光打标技术作为一种非接触、高精度的加工方式,因其持久清晰、环保节能和灵活性强的特点,逐渐成为智能手表后盖标记的理想选择。

然而,激光打标的高精度要求与智能手表后盖的曲面特性、来料位置偏差等因素之间的矛盾,使得单纯依靠机械定位难以实现完美打标。这时,机器视觉技术的引入成为了破局的关键。通过高精度的MasterAlign视觉定位系统,生产线能够实时捕捉工件位置,引导激光头进行精准打标,将个性化定制带入大规模生产,极大地提升了生产效率和产品附加值。
智能手表后盖激光打标过程中的视觉定位环节,是确保每一件产品都完美无瑕的关键所在。它如同为激光设备装上了“智慧之眼”,让机器能够感知、分析并作出精准决策。这一过程主要依赖于高分辨率的工业相机、先进的光学组件和强大的图像处理算法,MasterAlign视觉系统便是其中的佼佼者。
在实际应用中,智能手表后盖在进入打标工位时,其位置和角度可能存在微小的偏差。这些偏差可能源于来料摆放、夹具的微小磨损或传送带的振动。如果没有视觉系统的干预,直接进行激光打标,极易导致标记位置错误、图案扭曲甚至产品报废。MasterAlign视觉系统通过其高分辨率工业相机实时捕捉后盖的图像。系统会智能地抑制金属表面常见的反光干扰,并通过优化的光源技术增强图像对比度,确保即使是细微的特征点也能被清晰识别。
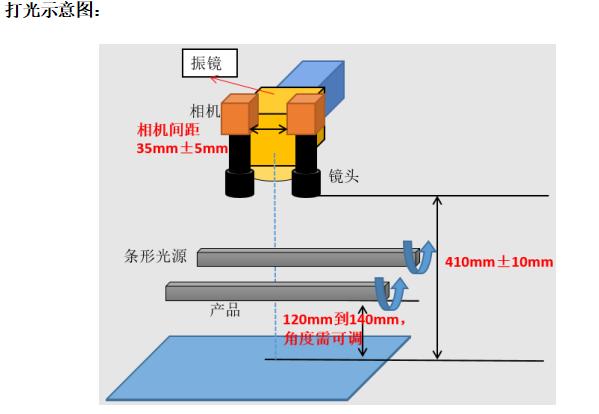
图像捕获后,系统的核心算法开始工作。它通过特征匹配、轮廓提取或基准点识别等算法,将实时图像与预设的理想模板进行对比。MasterAlign系统能够快速计算出手表后盖的当前坐标与理论位置的偏移量。这个计算过程通常在毫秒级别内完成,精度达到±0.02mm。计算出偏移量后。激光打标机根据这些数据动态调整振镜和聚焦镜片,或者通过协调运动控制卡修正激光束的路径,确保激光落点始终与设计位置保持一致。这种实时闭环控制消除了人工干预的需要,保证了打标过程的超高精度和一致性。
对于智能手表后盖,其表面往往不是纯平的,可能带有轻微的弧度或曲面。传统的二维视觉定位在面对高度变化时可能会遇到挑战。MasterAlign系统通过双相机立体成像或激光位移传感器进行高度补偿,有效解决了这一问题。双相机从不同角度同步拍摄工件,通过三角测量法计算空间坐标,为激光焦点的动态调整提供数据支持,确保在整个打标面上激光能量分布均匀,标记清晰深浅一致。

值得一提的是,该系统的操作界面设计力求简洁直观。工程师无需深厚的机器视觉专业知识,通过图形化界面即可完成相机参数设置、模板制作和坐标校准等操作。大幅降低了使用门槛和培训成本,使得高精度视觉定位技术能够更快地在智能手表制造工厂中普及应用。
配置清单如下:

机器视觉与激光打标技术的结合,无疑为智能手表后盖的加工带来了一场深刻的变革。通过MasterAlign视觉系统的精准定位,激光打标不再是孤立的加工单元,而是进化成为一个能够实时感知、智能决策和精准执行的智能化系统。它不仅解决了高精度与高效率之间的矛盾,将打标精度提升至微米级别,同时支持±0.02mm的定位精度,极大地减少了因位置偏差导致的废品率,为企业节约了可观的生产成本;更重要的是,它赋予了生产线前所未有的柔性化生产能力,使得小批量、多品种的个性化定制成为可能,完美契合了当下市场对快速反应和个性化需求的追求。