镭神C16在Ubuntu下的连接和驱动安装教程
系统:Ubuntu20.04 / Ros noetic
1.硬件连接
雷达接好线并通电后,把网线插入自己电脑的网口,右上角打开网络设置,点击小齿轮。

设置有线连接的静态IP地址和掩码如下(IPv4)。IPv4方式需要选择:"Manual - 手动",同时设置"Address-地址:192.168.1.102",设置“Netmask-子网掩码:255.255.255.0”;其他的内容无需设置(网上相关教程还设置了其他内容,但是实际上没必要)。只需设置这个IPv4就可以了,其他内容不用管,官方手册上面的也不用管。

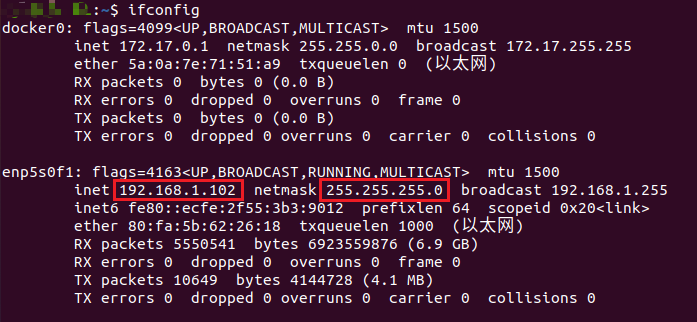
设置完毕之后,我们可以ifconfig命令查询连接的设备:
2.安装驱动
1.建立工作空间
mkdir -p lslida_C16/src
cd lslida_C16/src2.下载雷达驱动
git clone https://github.com/Forestry-Robotics-UC/lslidar_c163.编译
cd ..
catkin_make3.修改ip
修改网络链接IP与设备IP在同一网段下,打开lslidar_c16.launch文件,文件路径:/home/用户名/lslidar_C16/src/lslidar_c16/lslidar_c16_decoder/launch/lslidar_c16.launch:
# line5:修改ip<param name="device_ip" value="192.168.1.200"/> <!--192.168.1.200: your PC ip must be manually set to 192.168.1.102-->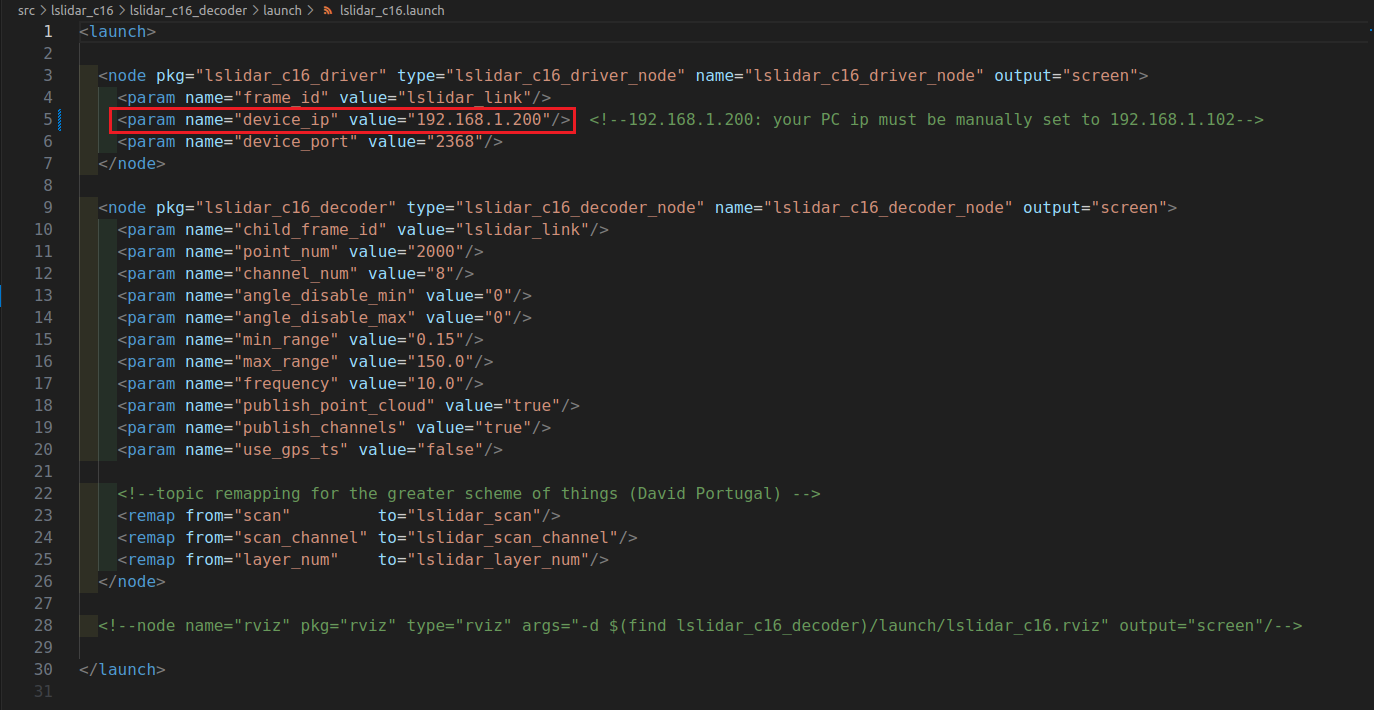
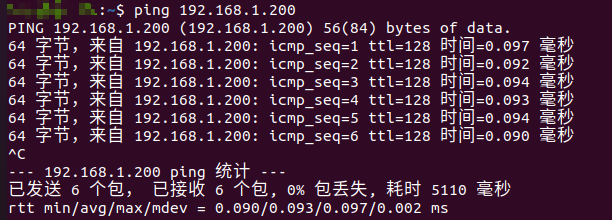
打开终端:ping 雷达 IP,测试硬件是否连接正常,若 ping 通则正常,否则检查硬件连接。(雷达IP默认为:192.168.1.200)
4.查看激光雷达点云
1.启动驱动
source ./devel/setup.bash
roslaunch lslidar_c16_decoder lslidar_c16.launch2.显示雷达检测到的数据
打开另一个新的终端,执行以下命令:
rviz3.添加PointCloud2
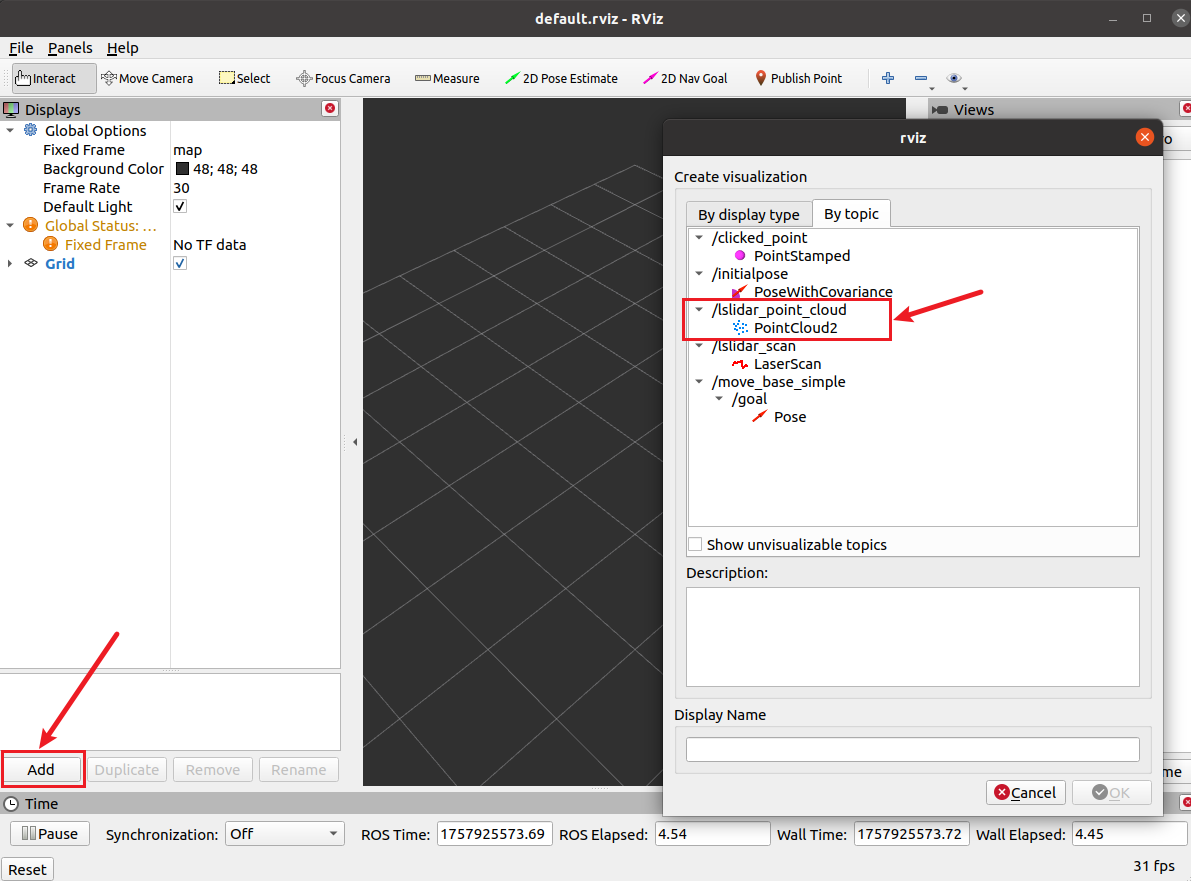
根据lslidar_c16.launch文件,把Fixed Frame改成laser_link
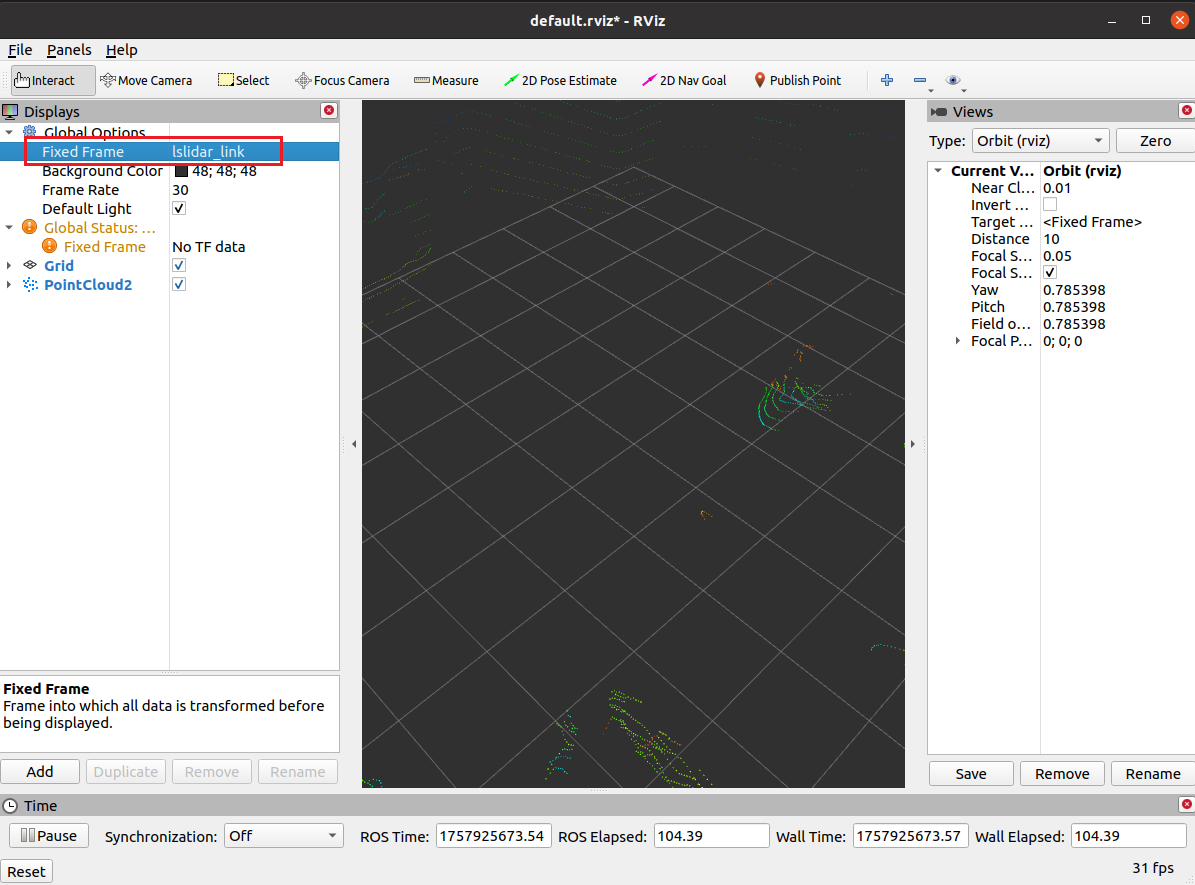
这样就能查看点云信息了:
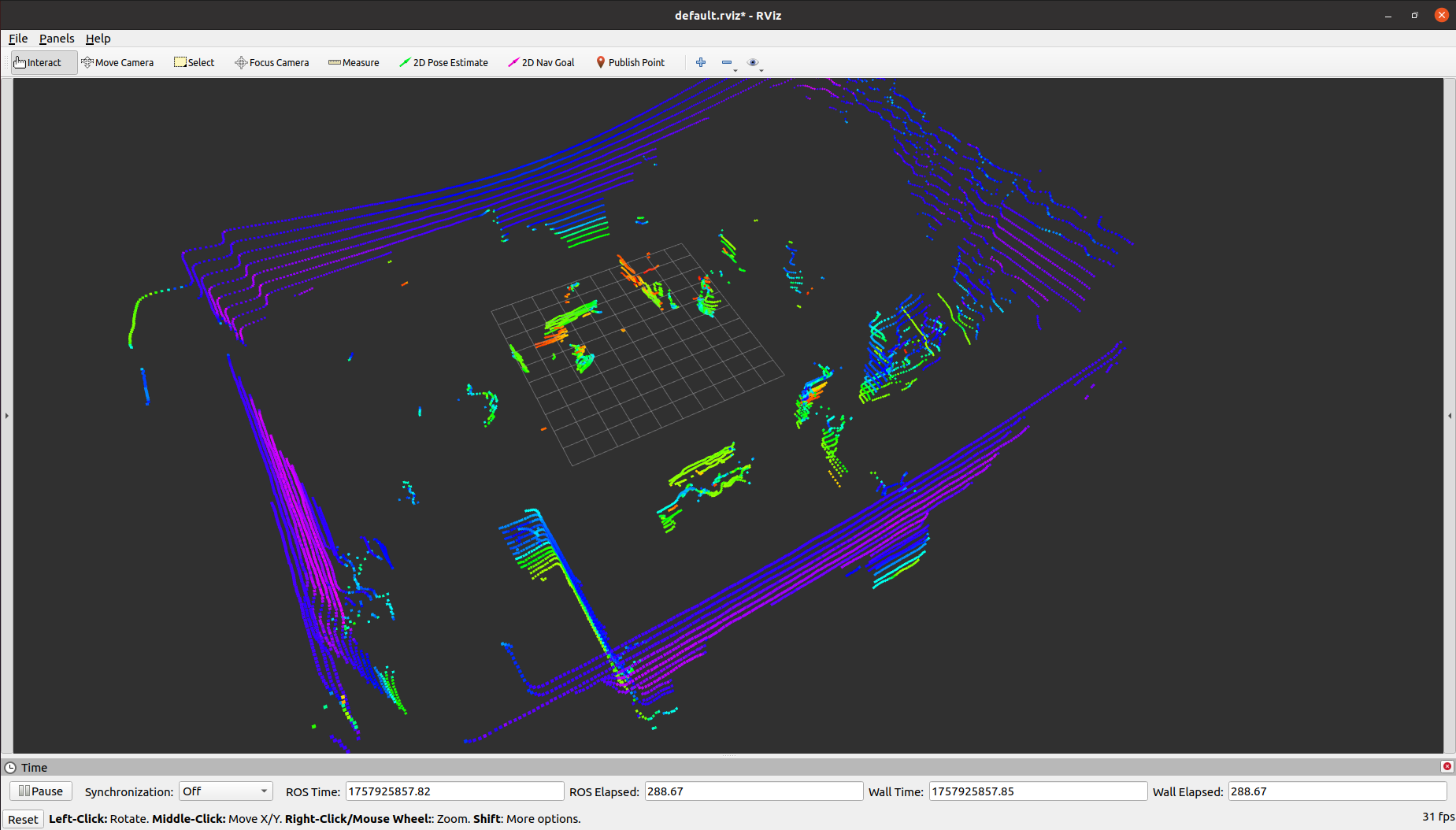
至此,本教程就暂告一段落了。
参考资料:
https://zhuanlan.zhihu.com/p/550878791
https://blog.csdn.net/luoganttcc/article/details/134231238
https://blog.csdn.net/m0_60355964/article/details/126398236