第九篇 永磁同步电机控制-弱磁控制
永磁同步电机控制系列课程:
第一篇 永磁同步电机控制-认识电机
第二篇 永磁同步电机控制-电机的分类
第三篇 永磁同步电机控制-硬件基础知识
第四篇 永磁同步电机控制-软件基础知识
第五篇 永磁同步电机控制-数学模型
第六篇 永磁同步电机控制-控制方法
第七篇 永磁同步电机控制-磁场定向控制FOC
第八篇 永磁同步电机控制-MTPA、MTPV
第九篇 永磁同步电机控制-弱磁控制
第十篇 永磁同步电机控制-SVPWM
第十一篇 永磁同步电机控制-位置环、转速环、电流环PI控制
第十二篇 永磁同步电机控制-PI整定
第十三篇 永磁同步电机控制-死区补偿
第十四篇 永磁同步电机控制-大总结
———————————————————————————————————————————
一、 为什么需要弱磁控制?
要理解弱磁控制,首先要明白永磁同步电机的瓶颈在哪里。
反电动势(Back-EMF):当电机高速旋转时,永磁体转子产生的磁场会在定子绕组中感应出一个电压,这个电压称为反电动势。其大小与转子转速和永磁体磁链成正比:E = K * Ω * φ(其中,E为反电动势,K为系数,Ω为电机转速,φ为磁通量)。
逆变器直流母线电压限制:驱动电机的逆变器由直流母线(例如电池)供电,其输出电压的最大幅值受限于直流母线电压 V_dc。逆变器能输出的最大相电压幅值约为 V_max = V_dc/。
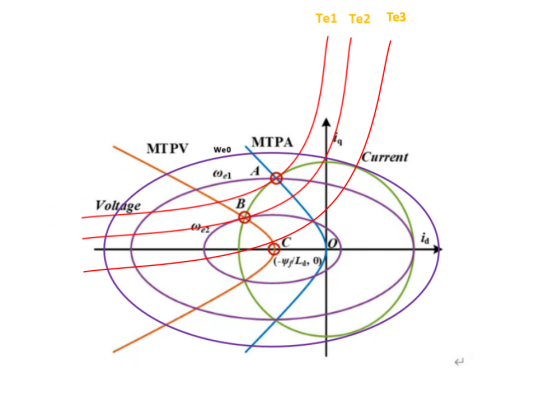
电压极限圆:电机稳定运行时,定子电压V_s必须满足 V_s ≤ V_max。这个约束在 d-q 轴坐标系下表现为一个椭圆区域,称为电压极限圆。
电流极限圆:电机运行时,电流Im必须满足Im ≤ Imax。这个约束在 d-q 轴坐标系下表现为一个圆型区域,称为电流极限圆。
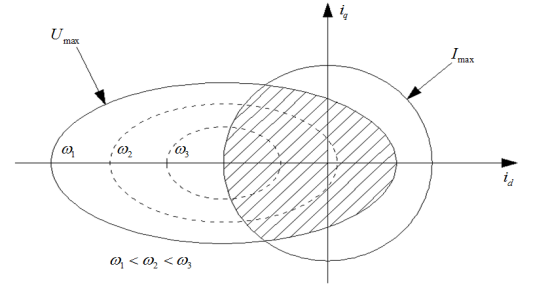
问题所在:随着转速 w 升高,反电动势 E 不断增大。当转速高到一定程度时,反电动势会接近甚至超过逆变器能提供的最大电压 V_max。为了维持 V_s ≤ V_max,控制器只能减少定子电流(即减小转矩电流 i_q),从而导致输出转矩下降,电机无法进一步加速。
弱磁控制的目的就是为了突破这个电压限制,同时在电流限制范围内,让电机能在基速以上更高的转速范围内运行,从而拓宽电机的恒功率运行范围。
二、弱磁控制的基本原理
“弱磁”顾名思义,就是“削弱磁场”。其核心思想是:利用定子电流产生的磁场,来抵消一部分永磁体产生的磁场,从而在总体上降低电机的气隙磁场强度。
如何实现? 在永磁同步电机的矢量控制中,我们通常将定子电流分解为两个分量:
直轴电流 (i_d): 与永磁体磁场方向一致(或相反)的电流分量。它主要产生磁化或去磁效应,几乎不产生转矩。
交轴电流 (i_q): 与永磁体磁场方向垂直的电流分量。它是产生转矩的核心分量。
“负的 i_d”是关键:
如果注入 负的直轴电流 (i_d < 0),这个电流产生的磁场方向与永磁体磁场方向相反,会起到去磁作用,从而削弱总的气隙磁场。气隙磁场被削弱后,反电动势 E 就会减小。这样,在相同的直流母线电压下,电机就可以在更高的转速下运行,同时控制器仍有足够的电压空间来注入产生转矩的 i_q 电流。
这里我们回顾一下永磁同步电机一些重要点:
1、永磁同步电机分类
内嵌式永磁同步电机(Ld < Lq),存在磁阻转矩;
表贴式永磁同步电机(Ld = Lq),不存在磁阻转矩。
2、永磁同步电机数学方程:

永磁同步电机的转矩由永磁转矩和磁阻转矩共同组成。
我们对电机方程做些简单的数学变换:
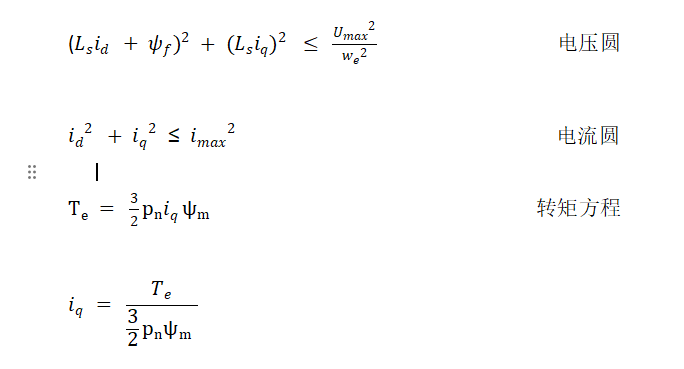
内置式永磁同步电机的电压极限圆方程、电流极限圆方程

表贴式永磁同步电机的电压极限圆方程、电流极限圆方程
3、MTPA、MTPV
MTPA核心思想:在输出特定转矩时,通过控制定子电流的幅值和相位(即d轴和q轴电流的分量),使得所需要的定子电流幅值最小。
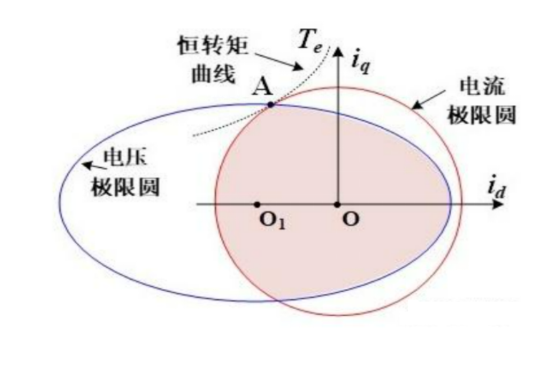
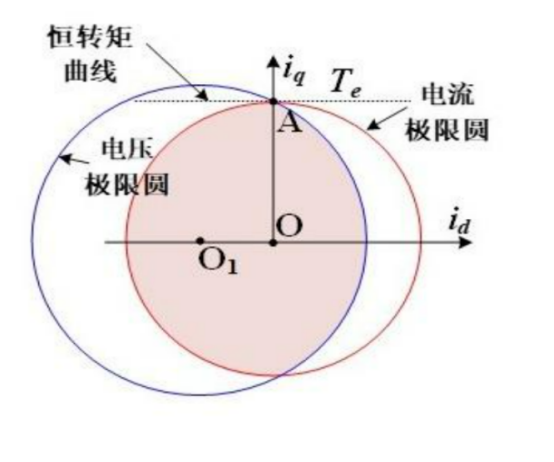
MTPV核心思想:在电压极限椭圆的边界上(V_s = V_max),寻找使转矩 T_e 最大的点。
详细分析参见:
永磁同步电机控制进阶(一):弱磁控制——突破电压极限的转速自由
三、弱磁控制的实现方法
弱磁控制策略多种多样,从简单到复杂,以下是几种常见方法:
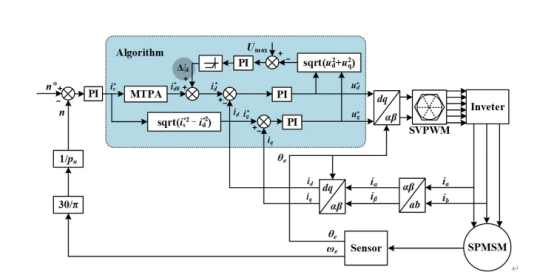
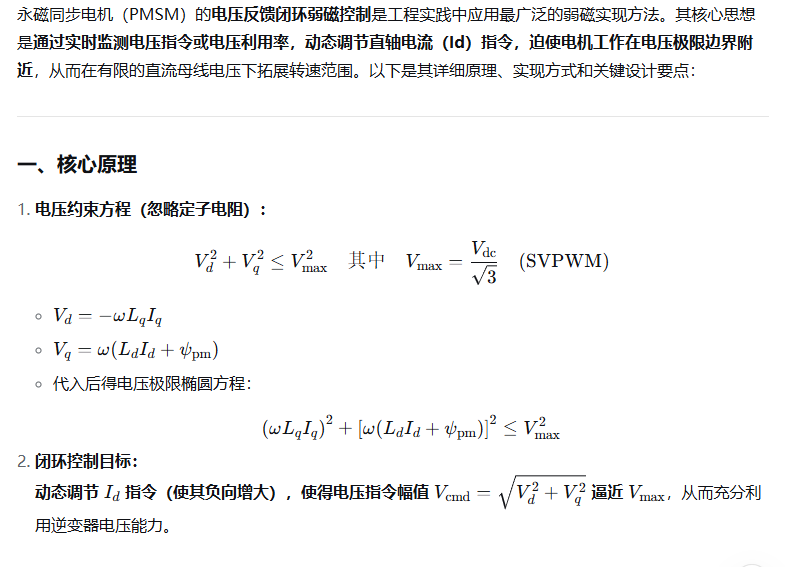
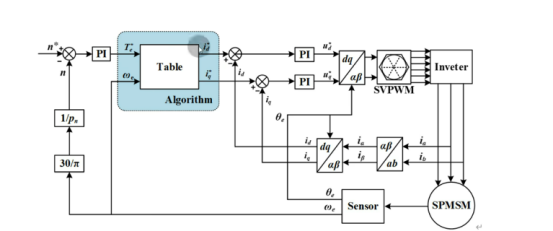
1、基本弱磁控制(基于电压反馈)
这是最经典和直观的方法。
工作流程:
a、速度环控制器(ASR)根据速度误差输出初始的转矩电流指令 i_q^*。
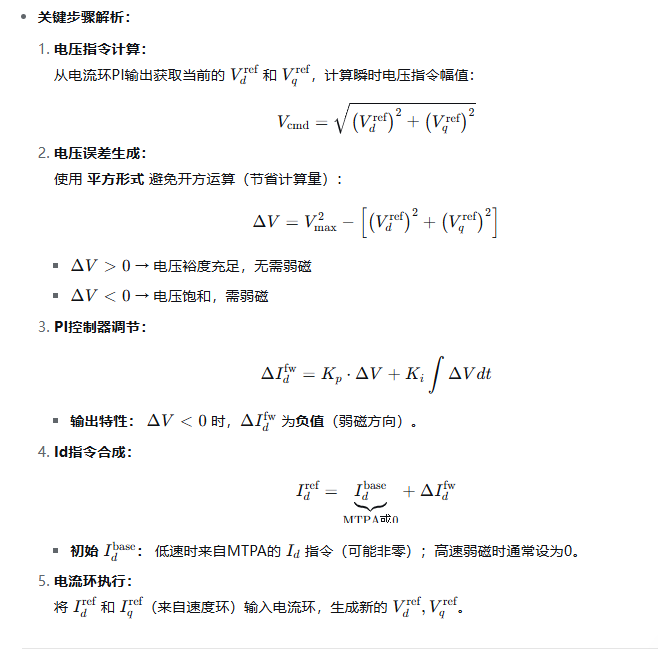
b、弱磁控制器实时计算当前定子电压的幅值 V_s = √{V_d^2 + V_q^2}。
c、将 V_s 与逆变器最大输出电压 V_{max} 进行比较。
d、如果 V_s ≥ V_{max},说明电压即将饱和,需要弱磁。控制器会自动减小 i_d^*(使其更负),从而削弱磁场。
e、电流控制器(ACR)根据新的 i_d^* 和 i_q^* 生成SVPWM信号驱动逆变器。
f、这个过程是动态的,不断调整 i_d^*,使得电机工作在电压极限圆的边界上,从而充分利用直流母线电压。
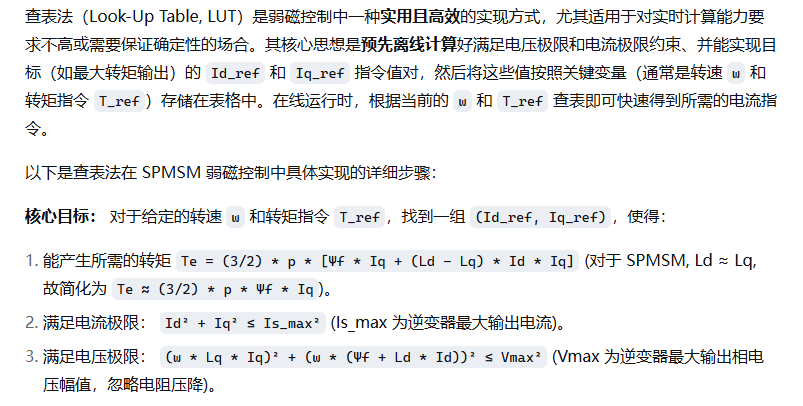
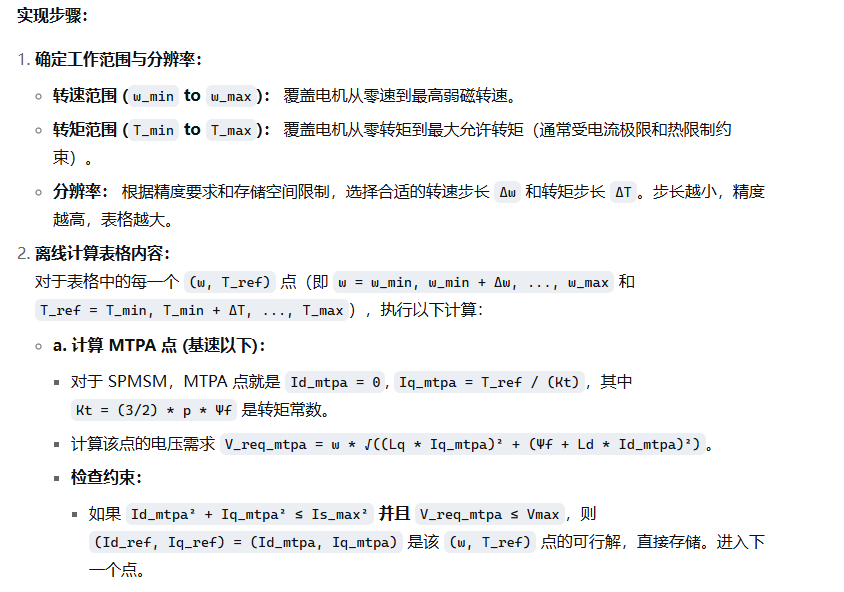
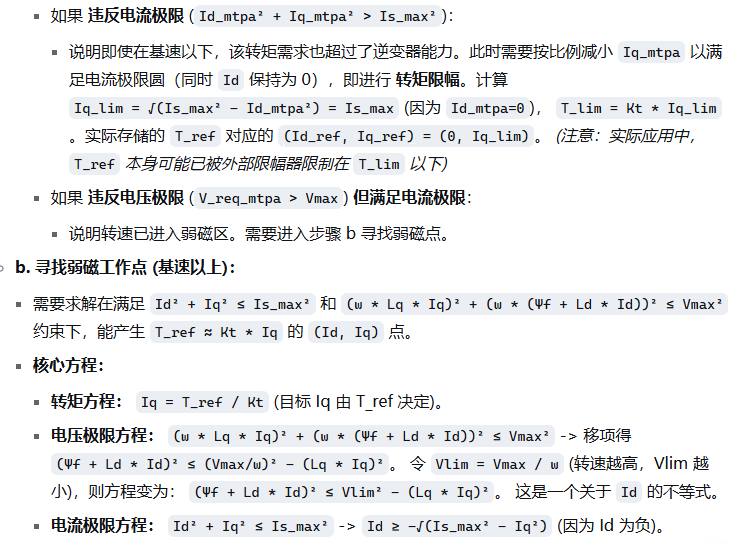
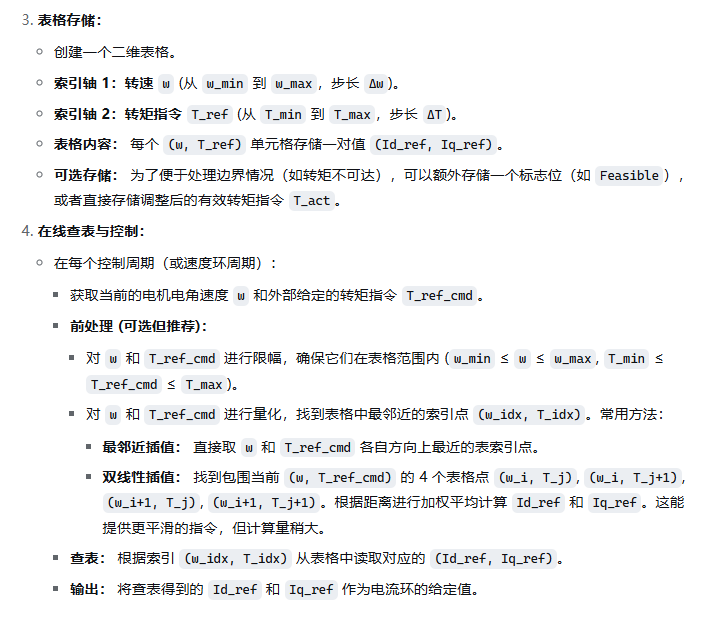
2、基于查表法/MTPV的优化弱磁
在深度弱磁区,为了获得最优性能(如最大转矩输出或最小电流损耗),控制策略会更加复杂。例如:
最大转矩每安培(MTPA):在基速以下采用,保证低速高效率。
最大转矩每伏(MTPV):在深度弱磁区采用,表示在电压极限下,如何分配 i_d 和 i_q 能获得最大的输出转矩。这通常是弱磁控制追求的最高目标,需要精确的电机模型和复杂的在线计算。
永磁同步电机查表法(Matlab)
%永磁同步电机弱磁查表function [Id_table, Iq_table, w_vec, T_vec] = generateSPMSM_FluxWeakeningTable()% =============================================% 电机参数设置 (根据实际电机修改)% =============================================motor.Psi_f = 0.0105; % 永磁体磁链 (Wb)motor.Ld = 0.00045; % d轴电感 (H)motor.Lq = 0.00045; % q轴电感 (H) - 表贴电机Ld≈Lqmotor.p = 4; % 极对数motor.Rs = 0.017; % 定子电阻 (Ω) - 弱磁计算中常忽略motor.Is_max = 83; % 最大相电流幅值 (A)motor.Vmax = 12/sqrt(3); % 最大相电压幅值 (V) = Vdc/sqrt(3)% =============================================% 工作范围设置% =============================================w_min = 0; % 最小电角速度 (rad/s)w_max = 1600; % 最大电角速度 (rad/s) 4000r/minT_min = 0; % 最小转矩指令 (Nm)T_max = 7.2; % 最大转矩指令 (Nm)% 表格分辨率w_step = 50; % 转速步长 (rad/s)T_step = 0.5; % 转矩步长 (Nm)% 生成网格点w_vec = w_min:w_step:w_max;T_vec = T_min:T_step:T_max;[W_grid, T_grid] = meshgrid(w_vec, T_vec);% 初始化表格Id_table = zeros(size(W_grid));Iq_table = zeros(size(W_grid));% =============================================% 离线计算每个(w, T_ref)点的电流指令% =============================================for i = 1:numel(W_grid)w = W_grid(i);T_ref = T_grid(i);% 计算目标Iq (忽略磁阻转矩)Kt = 1.5 * motor.p * motor.Psi_f;Iq0 = T_ref / Kt;% 零速处理if w == 0[Id_table(i), Iq_table(i)] = handleZeroSpeed(Iq0, motor);continue;end% 非弱磁区检查 (Id=0)[in_base_speed, Id0, Iq0_clipped] = checkBaseSpeed(w, Iq0, motor);if in_base_speedId_table(i) = Id0;Iq_table(i) = Iq0_clipped;else% 弱磁区计算[Id_table(i), Iq_table(i)] = calcFluxWeakeningPoint(w, T_ref, Iq0, motor);endend% =============================================% 可视化结果 (可选)% =============================================plotLookupTables(w_vec, T_vec, Id_table, Iq_table);
end%% 零速处理函数
function [Id, Iq] = handleZeroSpeed(Iq0, motor)% 零速只需考虑电流约束if abs(Iq0) <= motor.Is_maxId = 0;Iq = Iq0;elseId = 0;Iq = sign(Iq0) * motor.Is_max;end
end%% 非弱磁区检查
function [in_base_speed, Id, Iq] = checkBaseSpeed(w, Iq0, motor)% 计算Id=0时的电压需求Vs0 = w * sqrt((motor.Lq * Iq0)^2 + motor.Psi_f^2);% 检查约束current_ok = (Iq0^2 <= motor.Is_max^2);voltage_ok = (Vs0 <= motor.Vmax);if current_ok && voltage_okin_base_speed = true;Id = 0;Iq = Iq0;elsein_base_speed = false;% 电流约束裁剪if abs(Iq0) > motor.Is_maxIq = sign(Iq0) * motor.Is_max;elseIq = Iq0;endId = 0; % 临时值,后续弱磁计算会覆盖end
end%% 弱磁区计算函数
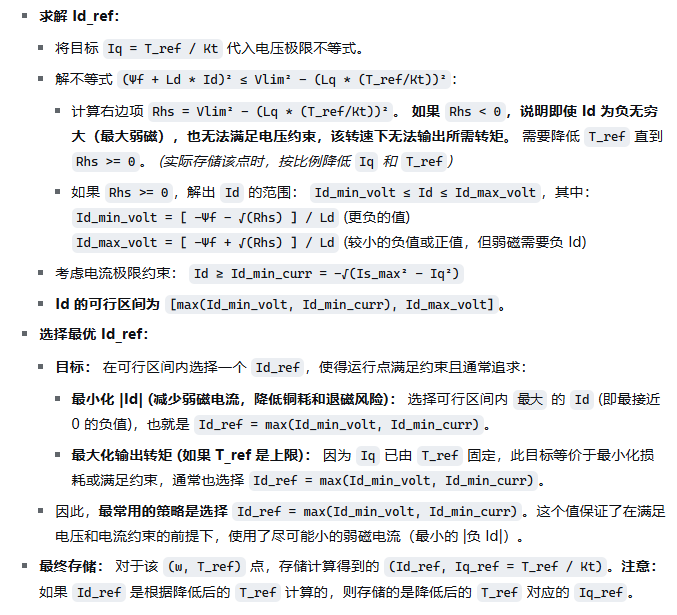
function [Id_ref, Iq_ref] = calcFluxWeakeningPoint(w, T_ref, Iq0, motor)% 计算转矩常数Kt = 1.5 * motor.p * motor.Psi_f;% 步骤1: 计算Iq的绝对上限Iq_lim_volt = motor.Vmax / (w * motor.Lq);Iq_lim = min(motor.Is_max, Iq_lim_volt);% 步骤2: 裁剪IqIq_ref = min(abs(Iq0), Iq_lim) * sign(Iq0);% 步骤3: 计算电压约束Rhs项Rhs = (motor.Vmax / w)^2 - (motor.Lq * Iq_ref)^2;% 步骤4: 处理Rhs<0的情况 (需进一步降低Iq)if Rhs < 0Iq_ref = 0.95 * motor.Vmax / (w * motor.Lq) * sign(Iq0);Rhs = (motor.Vmax / w)^2 - (motor.Lq * Iq_ref)^2;end% 步骤5: 计算Id的边界sqrt_Rhs = sqrt(max(Rhs, 0)); % 避免数值误差% 电压约束边界Id_min_volt = (-motor.Psi_f - sqrt_Rhs) / motor.Ld;Id_max_volt = (-motor.Psi_f + sqrt_Rhs) / motor.Ld;% 电流约束边界current_margin = motor.Is_max^2 - Iq_ref^2;if current_margin < 0Id_min_current = 0;Id_max_current = 0;elseId_min_current = -sqrt(current_margin);Id_max_current = sqrt(current_margin);end% 步骤6: 确定可行区间Id_min = max(Id_min_volt, Id_min_current);Id_max = min(Id_max_volt, Id_max_current);% 步骤7: 选择最优Id_refif Id_min > Id_max% 区间冲突处理:取中点并降低转矩Id_ref = (Id_min + Id_max) / 2;Iq_ref = 0.9 * Iq_ref; % 降低转矩else% 选择最接近0的Id (最小弱磁电流)if Id_max > 0Id_ref = min(Id_max, 0); % 优先选择0或负值elseId_ref = Id_max; % 最大负值中最接近0的endend% 步骤8: 退磁保护 (根据电机特性设置)Id_demag_max = -30; % 示例值, 需根据实际电机设置if Id_ref < Id_demag_maxId_ref = Id_demag_max;% 重新计算最大允许Iqnew_Iq_lim = sqrt(motor.Is_max^2 - Id_ref^2);Iq_ref = min(abs(Iq_ref), new_Iq_lim) * sign(Iq_ref);end% 步骤9: 验证并调整实际转矩T_actual = Kt * Iq_ref;if abs(T_actual) < 0.95 * abs(T_ref)% 记录警告:实际转矩不足fprintf('警告: 转速%d rad/s, 转矩%.1f Nm->%.1f Nm\n', w, T_ref, T_actual);end
end%% 可视化函数
function plotLookupTables(w_vec, T_vec, Id_table, Iq_table)% 创建新图形figure('Position', [100, 100, 1200, 800], 'Name', 'SPMSM弱磁控制查表');% Id_ref 曲面图subplot(2,2,1);[W, T] = meshgrid(w_vec, T_vec);surf(W, T, Id_table);shading interp;xlabel('电角速度 \omega (rad/s)');ylabel('转矩指令 T_{ref} (Nm)');zlabel('d轴电流 I_d (A)');title('d轴电流查表');colorbar;% Iq_ref 曲面图subplot(2,2,2);surf(W, T, Iq_table);shading interp;xlabel('电角速度 \omega (rad/s)');ylabel('转矩指令 T_{ref} (Nm)');zlabel('q轴电流 I_q (A)');title('q轴电流查表');colorbar;% 转矩-转速特性subplot(2,2,3);%T_max_profile = max(Iq_table, [], 1)*Kt;T_max_profile = max(Iq_table, [], 1)*0.063;plot(w_vec, T_max_profile, 'b-', 'LineWidth', 2);xlabel('电角速度 \omega (rad/s)');ylabel('最大输出转矩 (Nm)');title('转矩-转速特性');grid on;% 电流轨迹 (固定转速)subplot(2,2,4);hold on;colors = jet(length(w_vec));for i = 1:5:length(w_vec)plot(Iq_table(:,i), Id_table(:,i), 'Color', colors(i,:), ...'DisplayName', ['\omega=' num2str(w_vec(i)) ' rad/s']);endxlabel('I_q (A)');ylabel('I_d (A)');title('电流矢量轨迹');legend('Location', 'best');% 绘制约束边界%theta = linspace(0, 2*pi, 100);theta = linspace(-50, 50, 100);ylim([-40,10]);plot(motor.Is_max*cos(theta), motor.Is_max*sin(theta), 'k--', 'LineWidth', 1.5, ...'DisplayName', '电流极限');axis equal;grid on;
end
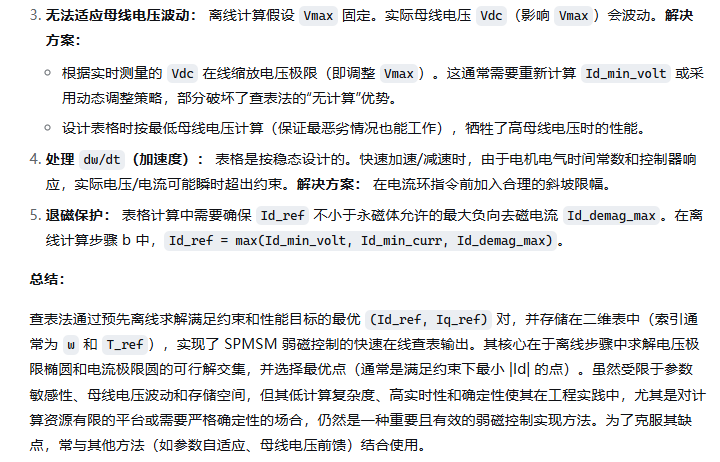
总结:在实际系统中,常常将多种方法结合使用,例如在进入弱磁区时采用前馈法快速响,再用反馈法进行微调以保证稳定性。

四、 弱磁控制的挑战与注意事项
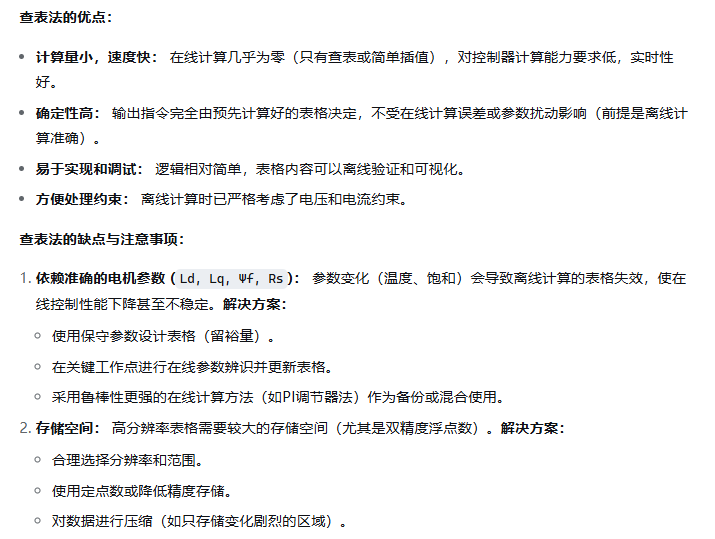
1、参数敏感性:弱磁控制性能高度依赖于电机参数(L_d, L_q,ψf , R_s)的准确性。参数变化(如温度升高、磁饱和)会导致控制效果变差,甚至不稳定。
2、电流调节器饱和:弱磁时,控制器需要同时输出较大的负 i_d 和正 i_q,总的定子电流 i_s = √{i_d^2 + i_q^2} 可能会超过逆变器能提供的电流极限(电流极限圆)。需要在电压极限圆和电流极限圆之间找到最佳工作点。
3、控制复杂度:相比基速以下的控制,弱磁算法更复杂,对处理器的计算能力要求更高。
4、效率降低:注入负的 i_d 电流会产生额外的铜耗,并且铁耗也会因频率升高而增加,导致电机和控制器在高速区的效率有所下降。