中科米堆CASAIM高精度蓝光3D扫描激光抄数服务逆向三维建模
高精度蓝光3D扫描技术通过特定波长的蓝色光源投射,配合高速工业相机获取物体表面三维坐标信息,实现非接触式三维数据采集。蓝光3D扫描仪毫米级测量精度,能够清晰呈现复杂曲面、微小特征及深孔结构,尤其适用于汽车钣金、航空叶片等传统测量方式难以处理的场景。激光抄数则进一步将扫描数据转化为可编辑的数字化模型,通过点云配准、特征提取等步骤,为逆向工程提供基础数据支撑。蓝光三维扫描技术凭借抗环境光干扰能力强、扫描速度快等特点,成为逆向建模过程中非常重要的数据获取方式。

基于蓝光三维扫描获取的高精度点云数据,逆向建模流程通过专业软件实现从物理实体到数字模型的完整转化。系统首先对原始点云进行去噪、精简和补洞处理,消除测量误差并优化数据质量。随后采用曲面拟合算法将离散点云转化为连续的三角网格模型,再通过NURBS曲面重建技术生成可编辑的数字化实体。这一过程不仅完整保留了原件的几何特征,还能实现局部细节的精准还原。对于存在磨损或缺失的实物,逆向建模可通过对称修复、特征延伸等方式进行智能补全,最终输出与原始物体完全一致的3D数字模型。该技术广泛应用于汽车改型、模具修复、文物数字化等方面,通过激光抄数服务将物理世界无缝转化为可编辑的虚拟资产。逆向建模的精度直接取决于前期3D扫描的数据质量,而蓝光三维扫描技术的高分辨率特性,为后续模型重建提供了可靠的数据基础。
汽车工业中,蓝光三维扫描技术用于钣金件逆向建模,快速获取车身曲面数据以支持改型设计;模具则借助激光抄数服务修复磨损部件,将旧模数据与新设计无缝衔接。逆向建模技术尤其适用于文物数字化保护,通过非接触式扫描建立高保真三维档案,为修复研究提供数据支撑。随着蓝光三维扫描精度的持续提升,逆向工程在复杂零件复制、快速原型制造等领域的应用深度将进一步延伸。
汽车钣金件3D扫描效果
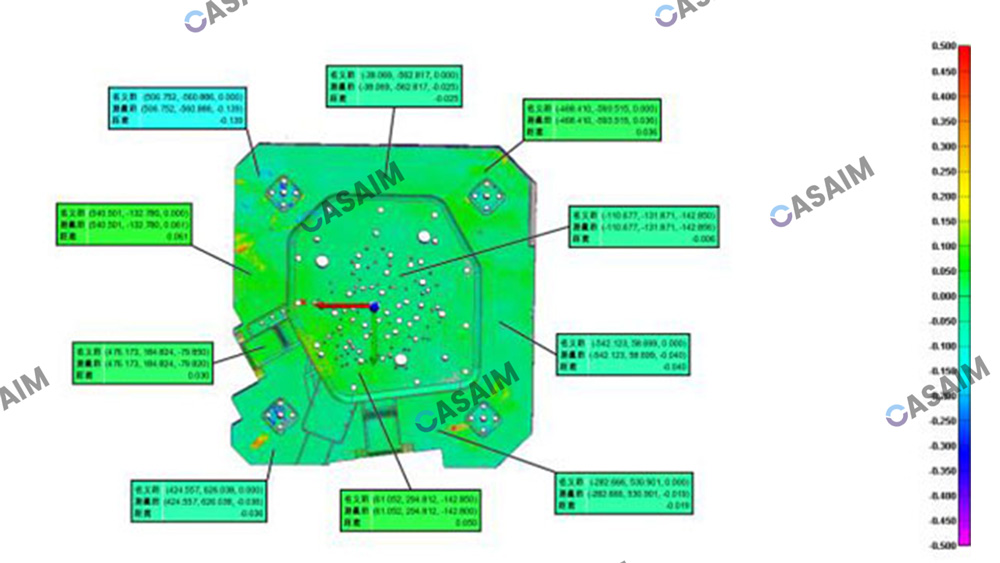
大型模具模架3D扫描效果
随着制造业数字化转型加速,高精度蓝光3D扫描与逆向建模技术将持续推动产业升级。未来技术发展将聚焦于多源数据融合算法优化,实现扫描数据与CAD/CAM系统的高效对接,同时提升自动化处理能力以缩短建模周期。企业采用该技术不仅能显著降低产品开发成本,更能通过快速原型验证抢占市场先机。