FOC系列(六)----学习DRV8313/MS8313芯片,绘制驱动板
声明:本人水平有限,博客可能存在部分错误的地方,请广大读者谅解并向本人反馈错误。
一、 DRV8313芯片
1.1 功能框图
数据手册前面一些芯片简介这里就不赘述了,可以点击链接去查看TI的数据手册:DRV8313数据手册。
下面直接看芯片内部框图:
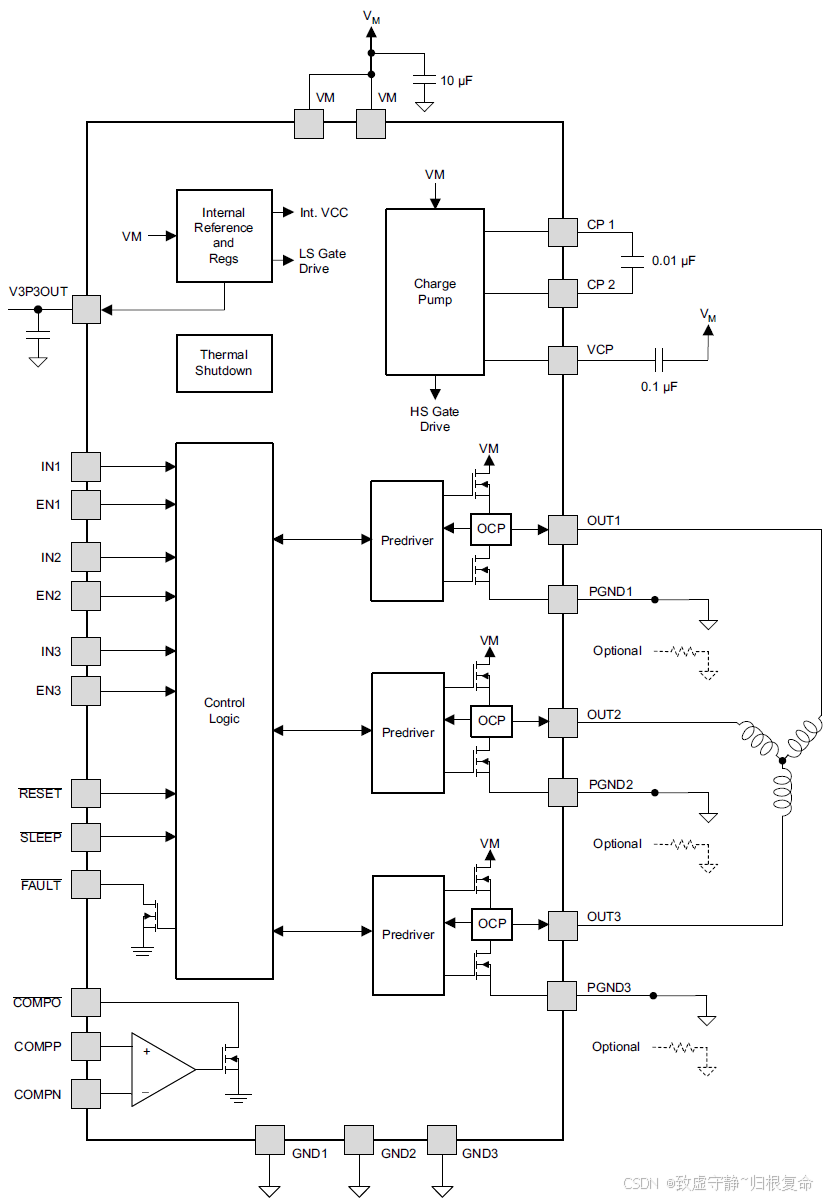
- 内部降压模块,VM供电之后出来3.3V,为内部提供参考和为寄存器供电。
- 电荷泵模块,主要通过升压为高边MOSFET提供栅极驱动电压。
- 逻辑控制单元,外部输入PWM波以及EN引脚,通过逻辑控制驱动内部NMOSFET。此外,还有RESET和SLEEP控制引脚,通过外部控制复位芯片或者使芯片进入睡眠。
- 过流保护模块,当输出的电流超过阈值时,芯片会进入保护状态(禁止三相输出)。
1.2 芯片引脚功能
下图是芯片的引脚分布:
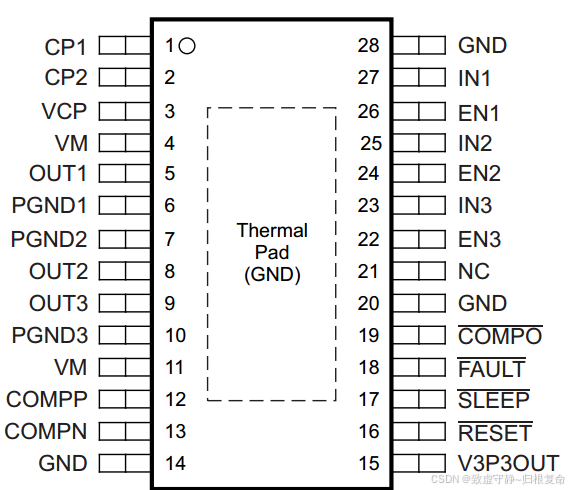
下面按照数据手册的说明,介绍引脚的功能,已经在设计原理图时需要注意的点。
1.2.1 电源和接地引脚
| 引脚标号 | 名称 | 描述 | 外部连接 |
|---|---|---|---|
| 1 | CP1 | 电荷泵飞跨电容 | 使用0.01uF 100V电容连接CP1和CP2引脚 |
| 2 | CP2 | 电荷泵飞跨电容 | 使用0.01uF 100V电容连接CP1和CP2引脚 |
| 12,20,28,PPAD(芯片背面大焊盘) | GND | 接地 | 连接至电源地 |
| 15 | V3P3OUT | 芯片3.3V输出 | 通过0.47uF 6.3V的电容连接到GND,允许该输出电压为其他芯片供电 |
| 3 | VCP | 高边MOSFET栅极驱动电压 | 通过0.1uF 16V电容连接至VM |
| 4,11 | VM | 芯片供电引脚 | 外部电源供电引脚,允许电压范围:8.2V-60V。使用至少10uF电容(电容耐压尽量大于供电电压两倍,如供电电压24V,则耐压需要50V)连接到GND |
1.2.2 控制引脚与状态引脚
| 引脚标号 | 名称 | 描述 | 外部连接 |
|---|---|---|---|
| 26 | EN1 | 通道1使能引脚 | 输入高电平使能输出1,内部有下拉电阻 |
| 24 | EN2 | 通道2使能引脚 | 输入高电平使能输出2,内部有下拉电阻 |
| 22 | EN3 | 通道3使能引脚 | 输入高电平使能输出3,内部有下拉电阻 |
| 27 | IN1 | PWM输入引脚1 | 逻辑输入控制输出1的电平,内部有下拉电阻 |
| 25 | IN2 | PWM输入引脚2 | 逻辑输入控制输出2的电平,内部有下拉电阻 |
| 23 | IN3 | PWM输入引脚3 | 逻辑输入控制输出3的电平,内部有下拉电阻 |
| 16 | nRESET | 复位引脚 | 输入低电平时复位芯片,并禁用输出,内部有下拉电阻 |
| 17 | nSLEEP | 睡眠模式 | 高电平时使能芯片,低电平时芯片进入睡眠(低功耗)模式,内部有下拉电阻 |
| 18 | nFAULT | 错误引脚 | 当芯片内部出现错误(如过温,过流,欠压等)时,该引脚会输出低电平 |
上表中前8个引脚均为输入,即通过外部输入DRV8313;最后的nFAULT引脚为DRV8313输出引脚。
1.2.3 比较器
| 引脚标号 | 名称 | 描述 | 外部连接 |
|---|---|---|---|
| 13 | COMPN | 比较器负极输入 | 比较器负极输入 |
| 12 | COMPP | 比较器正极输入 | 比较器正极输入 |
| 19 | nCOMPO | 比较器输出 | 比较器输出,开漏输出 |
1.2.4 输出引脚
| 引脚标号 | 名称 | 描述 | 外部连接 |
|---|---|---|---|
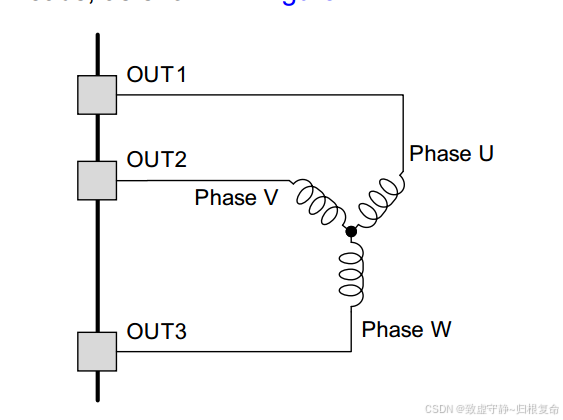
| 5 | OUT1 | 输出1 | 接到电机U相 |
| 8 | OUT2 | 输出2 | 接到电机V相 |
| 9 | OUT3 | 输出3 | 接到电机W相 |
| 6 | PGND1 | 输出1的GND | 接到GND,或者低侧电流反馈电阻 |
| 7 | PGND2 | 输出2的GND | 接到GND,或者低侧电流反馈电阻 |
| 10 | PGND3 | 输出3的GND | 接到GND,或者低侧电流反馈电阻 |
1.3 供电电压与逻辑电压
数据手册中提供的VM供电电压范围为8-60V;GND的电压波动范围在-0.5-0.5V;DRV8313自带的3.3V输出最大可以提供10mA的负载电流,这一点需要注意:使用时要关注其他芯片的工作电流范围。

此外,逻辑低电平<0.7V(一般是0.6V),高电平为2.2V-5.25V。
1.4 功能描述
DRV8313包含三个半H桥驱动电路,所有低侧FET的源极端子端接于单独的引脚(GND 1、GND 2和GND 3),可以在每个输出端使用低端电流检测电阻,用于计算AB相电流。也可以将这三个电阻连接到一个低端检测电阻。如果不需要计算电流,则可以将三个引脚直接接地。注意:如果使用低端检测电阻计算电流,需要保证GND1、GND2或GND3引脚上的电压不超过±500 mV。
INx输入引脚直接控制OUTx输出的状态(高电平或低电平); ENx输入引脚使能或禁用OUTx驱动器。逻辑如下表所示:
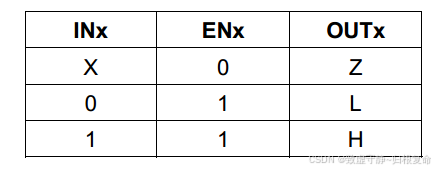
可以看出,当ENx为低电平时,OUTx为高阻态,即没有输出;当ENx为高电平,那么OUTx会跟多INx输入电平的高低进行输出。
由于芯片内部使用N沟道MOSFET,因此需要有高于VM电源的栅极驱动电压,使高端MOSFEI导通,以驱动电机。DRV8313集成了一个电荷泵电路,可产生高于VM电源的电压,电荷泵需要两个外部电容来工作,这俩电容的使用,可以参考框图和引脚描述。当nSLEEP为低电平有效时,电荷泵关闭。
当nRESET引脚输入低电平,芯片会被重置,同时禁用输出驱动器并忽略所有的输入引脚。
当nSLEEP引脚输入低电平,芯片会进入低功耗睡眠状态:状态将禁用输出驱动器,停止栅极驱动电荷泵,重置所有内部逻辑(包括故障),并停止所有内部时钟。在此状态下,器件忽略所有输入,直到nSLEEP被输入高电平。从睡眠模式返回时,在电机驱动器完全工作之前,必须经过一段时间(约1 ms)。注意,V3P3调节器在睡眠模式下保持工作状态。
1.5 芯片使用
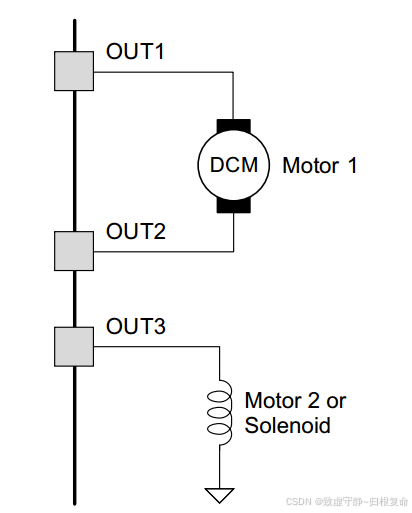
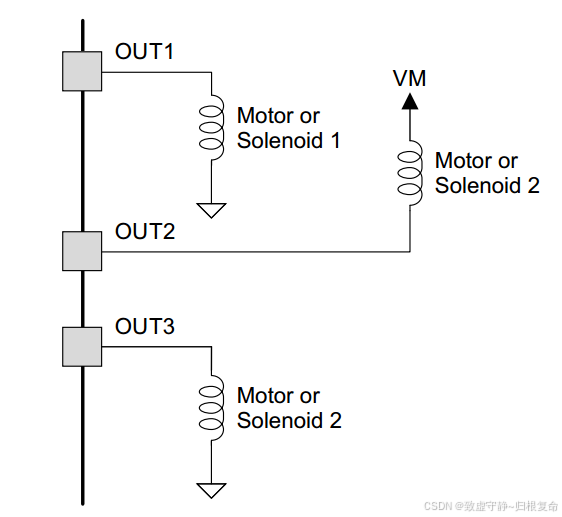
DRV8313最典型的应用是驱动三相无刷直流电机,此外,也可以驱动一个直流电机和一个电磁阀,也可以分三路驱动负责。一般是去驱动直流无刷电机:
二、 MS8313芯片
这个芯片时国产芯片,封装和DRV8313一样,引脚分布也是一样的,所以可以直接代替DRV8313驱动电机,有一点需要注意:MS8313的VM供电电压最大到40V。下面链接是MS8313的数据手册,有需要的可以看一下:MS8313数据手册。
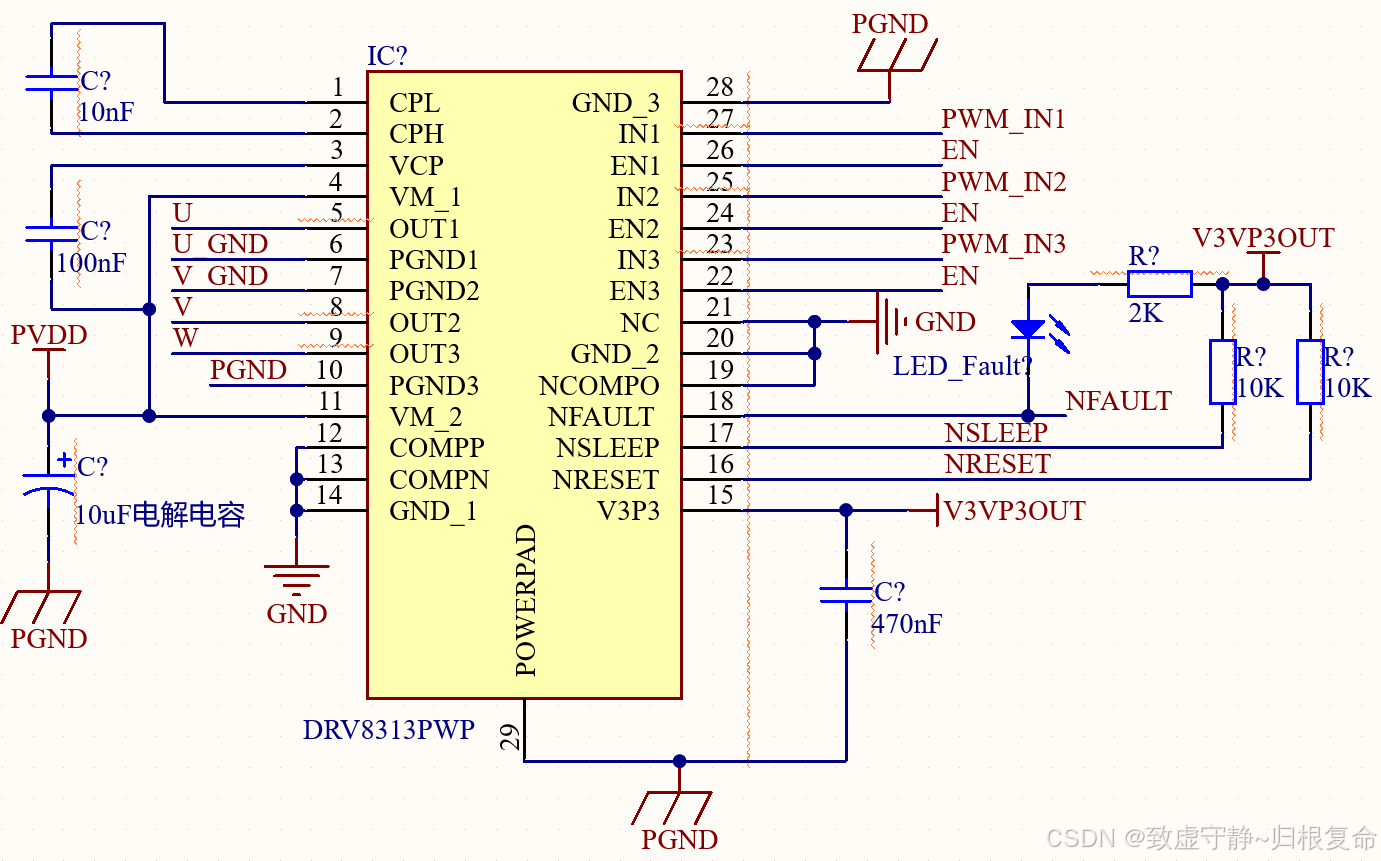
三、DRV8313电路板绘制
本来想着将DRV8313和STM32绘制在一起,但是突然想起来不能落下DRV8301,所以我打算将DRV8301和DRV8313以及STM32F405RGT6绘制成一个一体板,所以在这就先放DRV8313的原理图部分吧,后续博客会持续把一体板的原理图放上来的。

最后把DRV8301驱动2804云台电机的视频给各位读者看一下,目前电路板和代码都存在问题,只能进行开环转,等后续电路板和代码没啥问题了,会给各位再写几篇博客的。

四、往期回顾
FOC系列(一)----DRV8301芯片的学习
FOC系列(二)----继续学习DRV8301芯片
FOC系列(三)----AS5600磁编码器
FOC系列(四)----重新绘制DRV8301驱动板
FOC系列(五)----STM32F405RGT6控制板焊接与初步编写代码