目录
- 驱动器PID调节
-
- 【默认参数】观察轴的运动曲线:
- 【速度环-主调】观察轴的响应:
- 【位置环-微调】观察轴的响应:
- 【调试总结】
- 电子凸轮表
- 飞锯
- END
驱动器PID调节
AX5000系列带2个伺服电机,调节PID参数,观察实际速度、位置,给定速度、位置及跟随误差
【默认参数】观察轴的运动曲线:
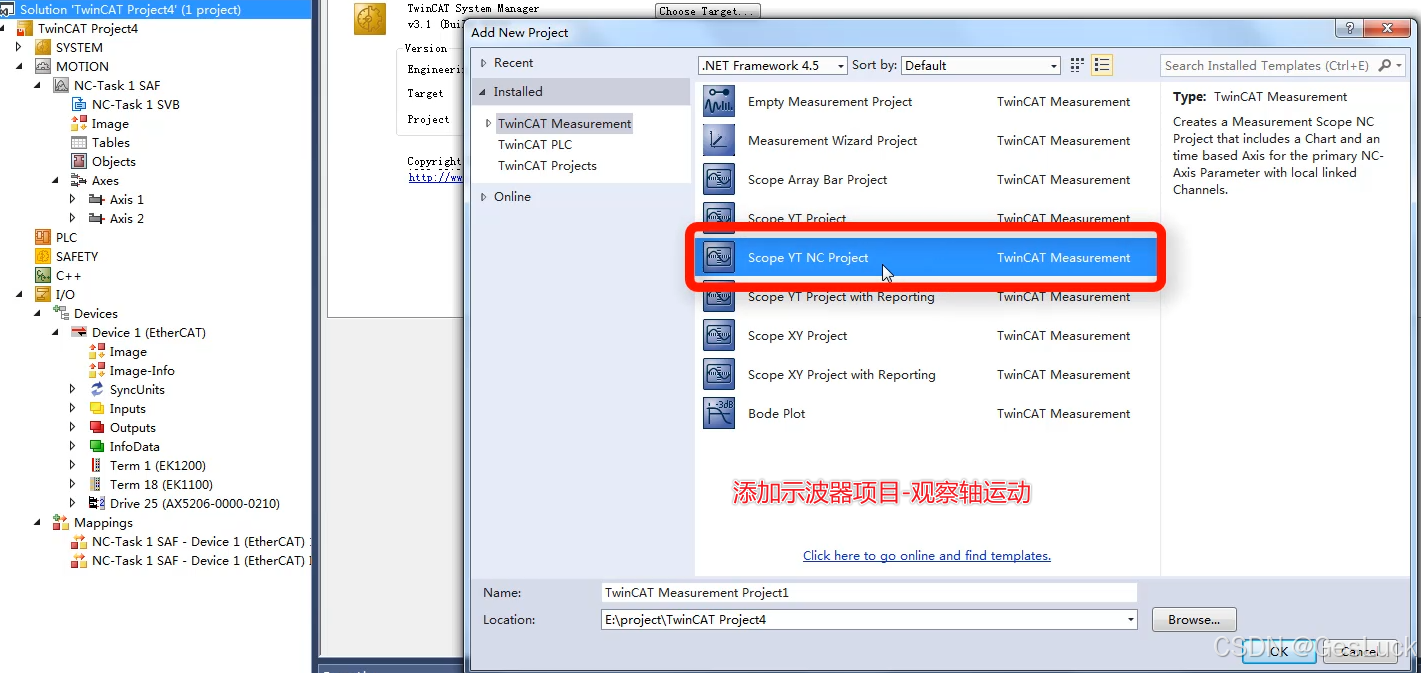
- 添加示波器(
YC NC)观察轴运动
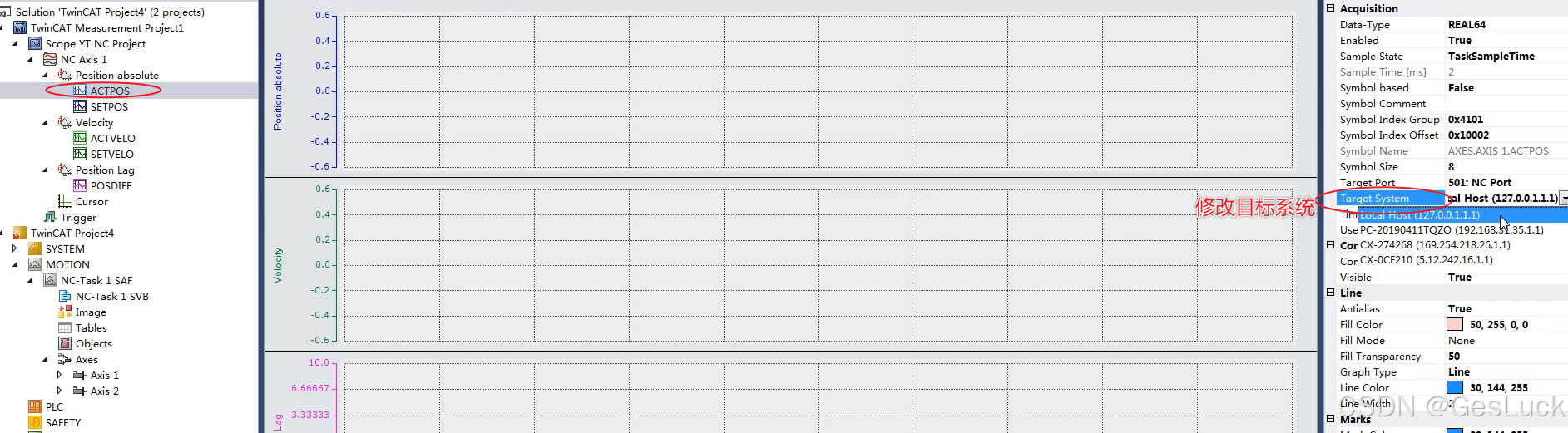
- 修改通道的连接目标(
Target system)
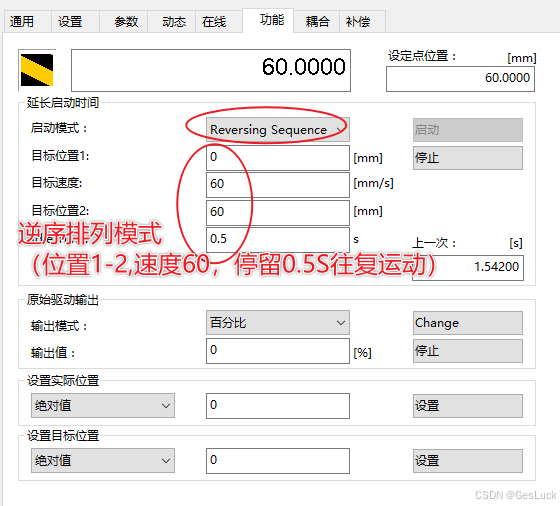
- 使能轴、设置轴模式往复运动(
Reversing Sequence)
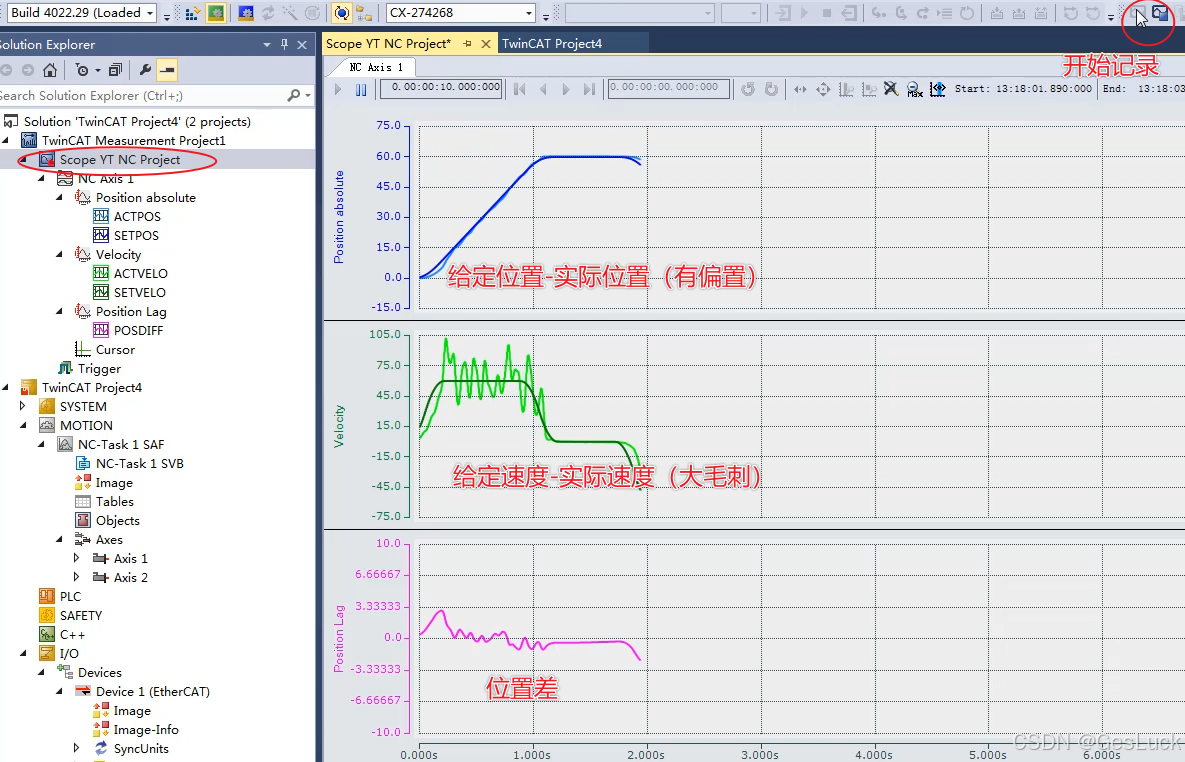
- 观察示波器记录(默认配置情况)
【速度环-主调】观察轴的响应:
- 设置轴参数(
关闭轴的跟随误差报警)