《面向高速三维表面成像的微型深度学习轮廓术》论文总结
**
《面向高速三维表面成像的微型深度学习轮廓术》论文总结
**
00摘要
如何从记录的光学信号中获取尽可能丰富、快速且准确的对象信息,一直是追求强大成像技术的关键问题。如今,超高速摄影的速度可以超过每秒一千万亿次。然而,它只能记录缺乏深度信息的二维图像,极大地限制了我们感知和理解复杂现实物体的能力。受计算机视觉中深度学习方法近期成功启发,我们提出了一种名为微深度学习轮廓测量法(μDLP)的新型高速三维(3D)表面成像方法,该方法使用结构光照明。通过适当训练的深度神经网络,可以从单个条纹图像中预测相位信息,然后将其转换为三维形状。实验表明,μDLPcan以每秒20,000帧的速度忠实恢复了动态物体的几何结构。此外,与广泛使用的基于傅里叶变换的快速3D成像技术相比,μDLP在相位精度、重建效率和易实现性方面表现更优,验证了that μDLP是一种强大的高速3D表面成像方法。
01.导言
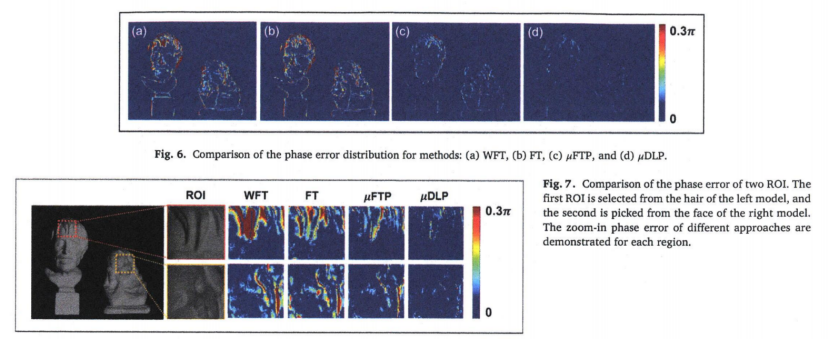
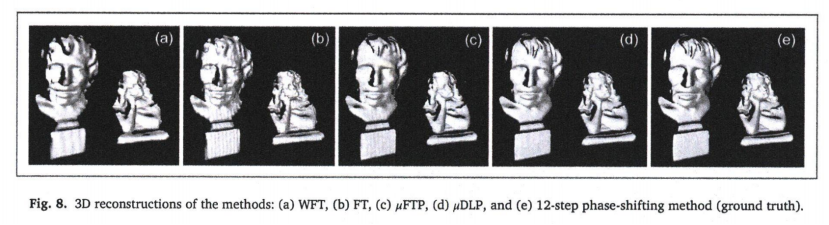
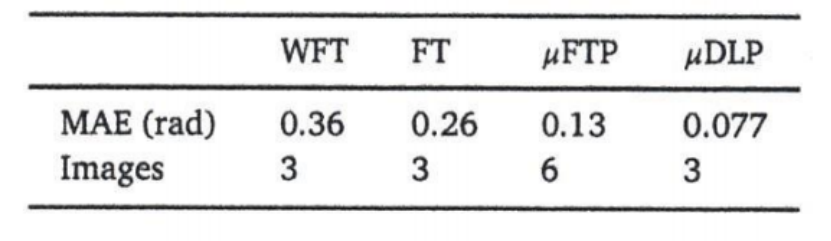
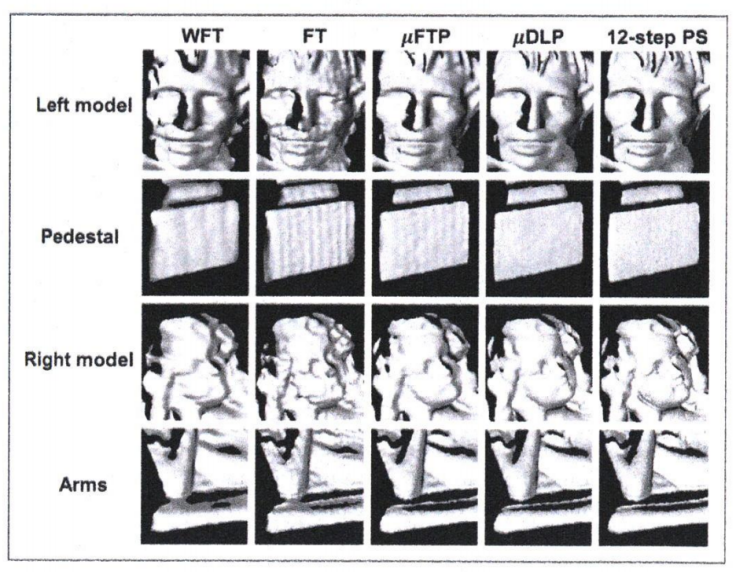
在本研究中,我们提出了一种新型微深度学习轮廓测量法(μDLP),该方法能够为瞬态场景实现高质量的三维形状重建。微尺度意味着条纹图案的频率变化和周期值都很小,这使得相位测量具有极高的精度,并且对全局光照具有较强抗干扰能力。深度学习作为一种强大的机器学习技术,在众多成像和计算机视觉应用中已取得显著成效[56-61]。得益于机器学习的优势,本方法在三个方面优于现有最先进方法:首先是高效性,通过训练有素的神经网络可从单张图像中提取相位信息;与μFTP相比,仅需使用半数图像即可获得三维图像。其次是高质量相位测量,实验表明μDLP的相位误差仅为傅里叶变换(FT)和小波变换(WFT)的三分之一,接近μFTP的一半。此外,仅需三张图像即可近似复现多帧相移法(需36张图像)计算出的真实三维结果。最后,本方法操作简便。与基于傅里叶变换的方法不同,后者在相位测量中深度依赖parameters,e.g.的精细调节、FT中的窗口大小、WFT中的σ值、采样间隔和频率阈值,而本提出的μDLP在神经网络训练完成后即可完全自动化运行。这意味着可以避免对最优参数进行穷举搜索。实验表明,μDLP是一种强大的高速三维表面成像方法,能够以每秒20,000帧的速度重建瞬态场景的高精度三维形状。
2.理论
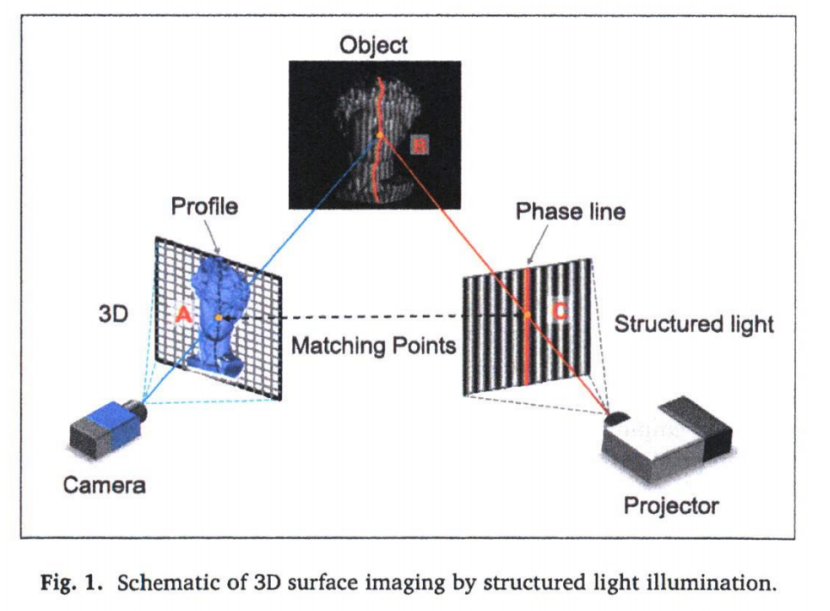
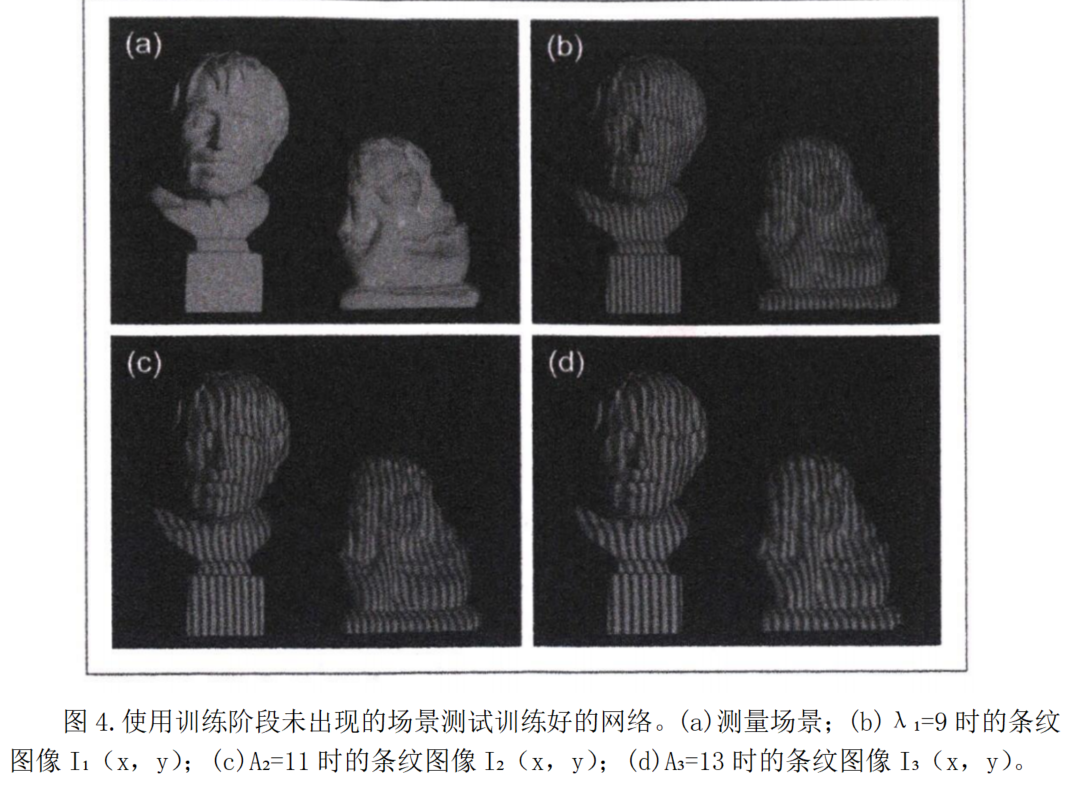
在μDLP中,条纹图像通过结构光照明系统捕获,该系统通常由投影仪和相机组成。根据图1所示的示意图,投影仪将条纹图像投射到被测物体上,以编码被照亮的表面。相机从不同视角捕捉该图像,从而条纹因物体深度变化而产生畸变。随后根据捕获的条纹图像计算相位,该相位作为线索用于获取三维信息。



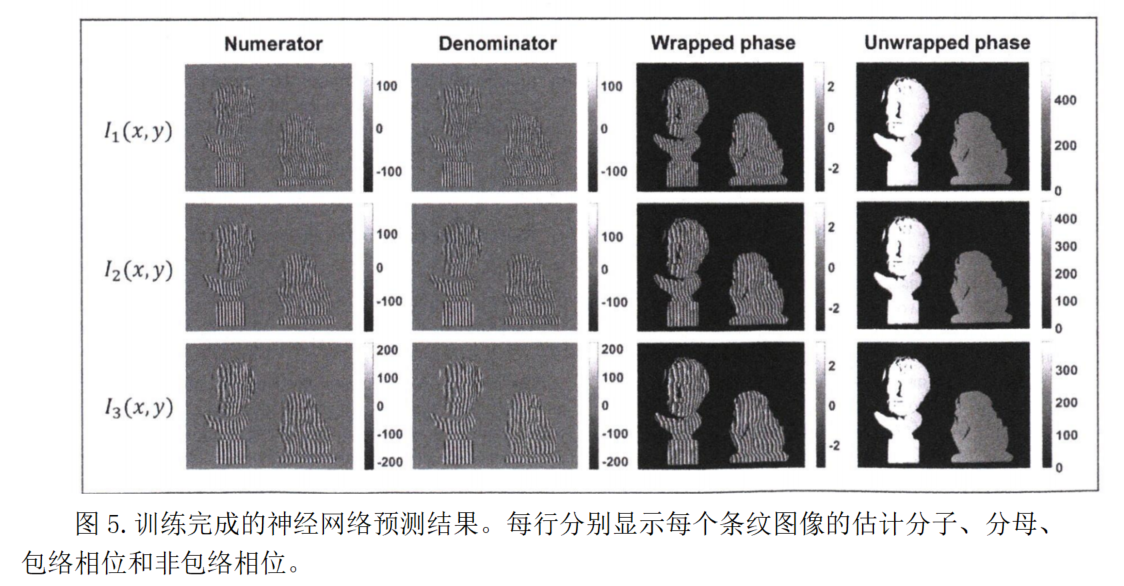
神经网络经过训练,可预测每个输入图像I(x,y)对应的分子M(x,y)和分母D(x,y)。每对分子与分母{M(x,y),然后,将yD(x,y)输入反正切函数(公式(3))以获得包裹相位图φ(x,y)。
接下来,通过基于投影距离最小化的时序相位解缠算法得到解缠相位图Φ(x,y)。
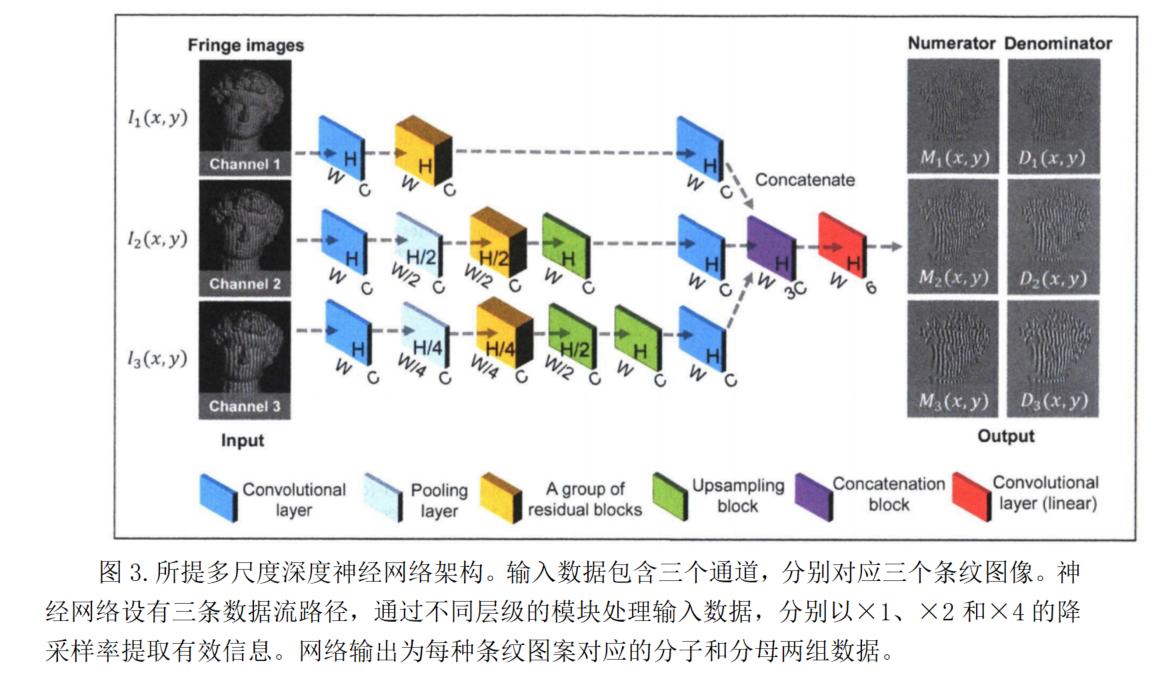
神经网络:
输入:3张不同频率的条纹图案
输出:对应的分子和分母
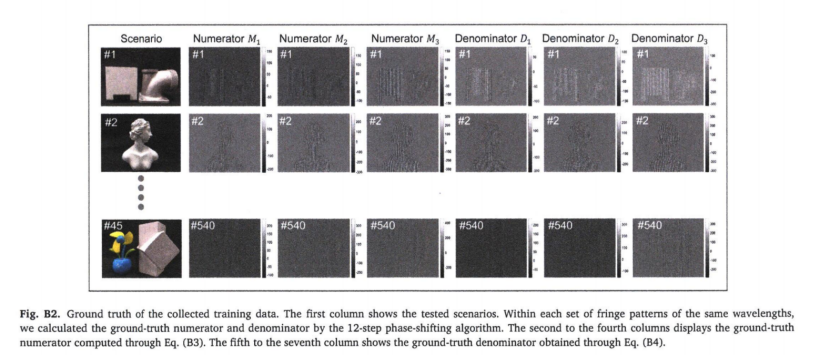
标签:采用12步法获得对应频率的分子和分母
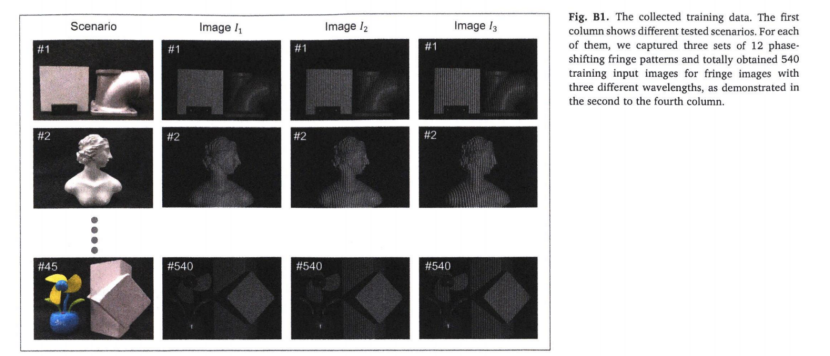
训练数据集:实验共采集了45个不同场景的训练数据,涵盖简单与复杂物体类型。每个场景记录12×3组相移条纹图案,最终所有场景共计获得1620幅条纹图像。

03实验
3.1.静态场景的μDLP性能
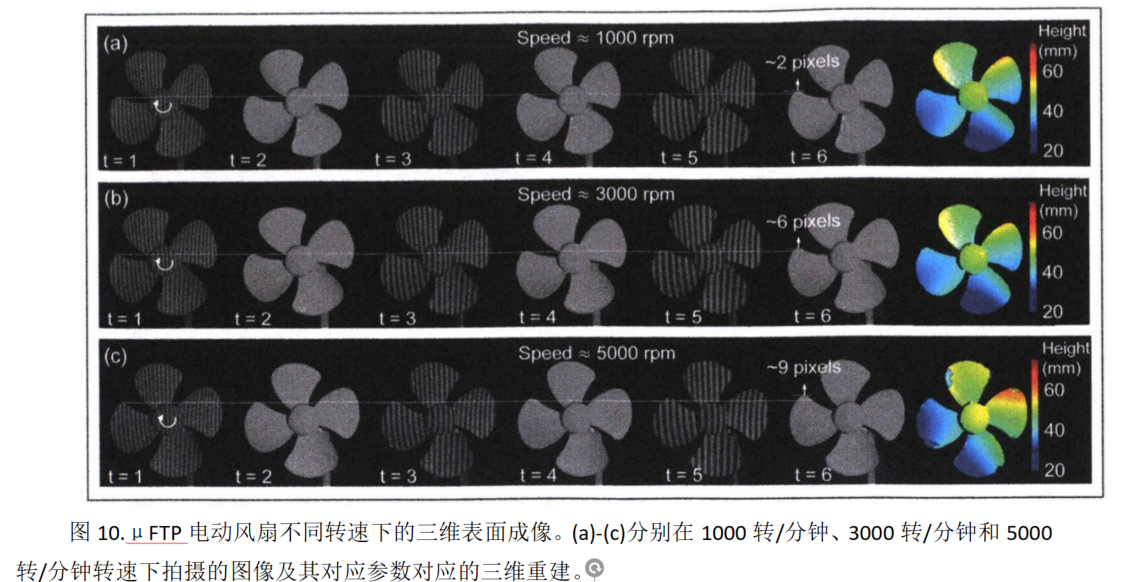
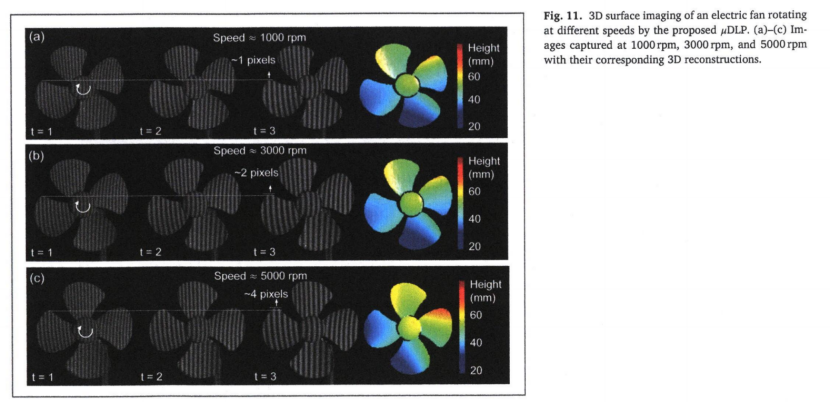
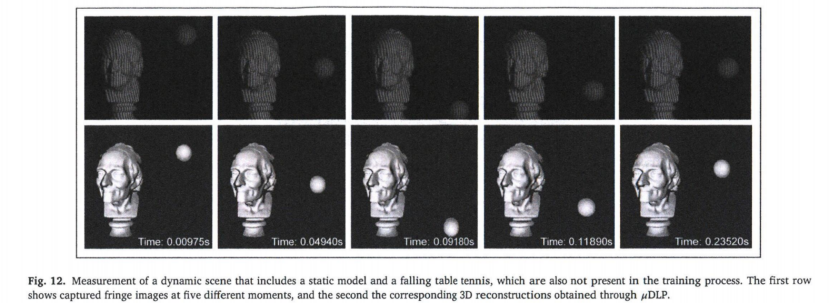
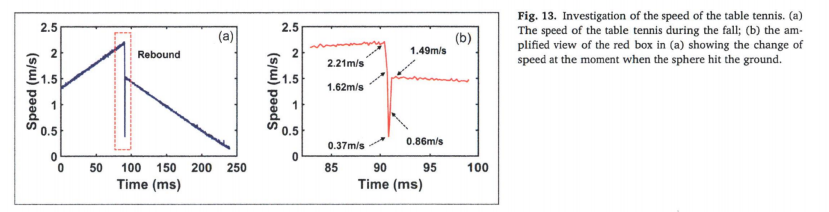
3.2.动态场景的μDLP性能
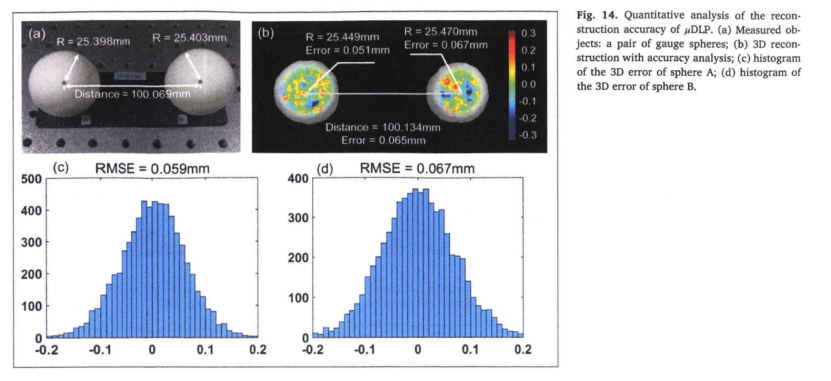
3.3.三维重建精度的定量评价
04结论
在本研究中,我们提出了一种新型高速三维表面成像方法μDLP,能够重建瞬态事件的密集且精确的三维形状。与大多数使用结构光照明的快速三维成像技术不同,μDLP该方法通过适当训练的深度神经网络,可以从单个条纹图像中提取相位信息。仅需几张波长略有不同的条纹图像,即可获得清晰且高质量的三维重建结果。
参考文献:Micro deep learning profilometry for high-speed 3D surface imaging
声明:作者水平有限,如有错误,务必留言指正,共同学习进步!(如有帮助,不妨点赞评论。)