自动驾驶中的传感器技术39——Radar(0)
1、车载毫米波雷达历史脉络
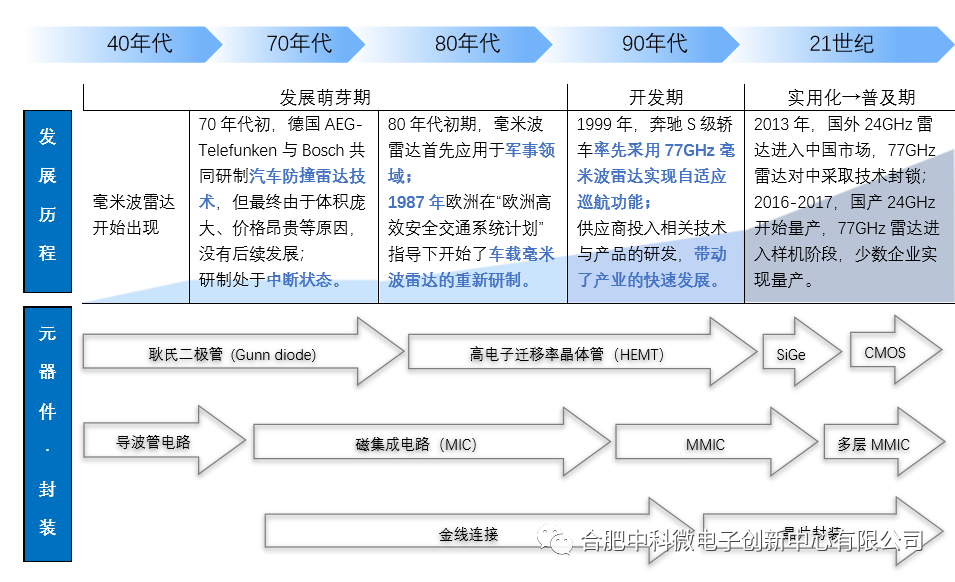
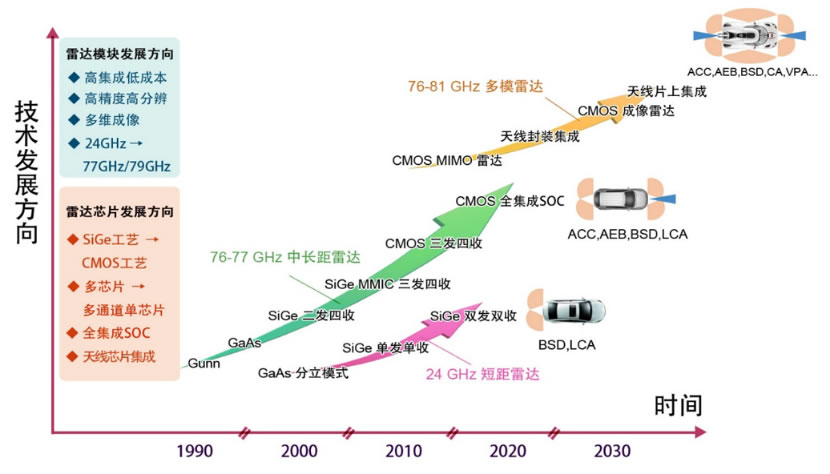
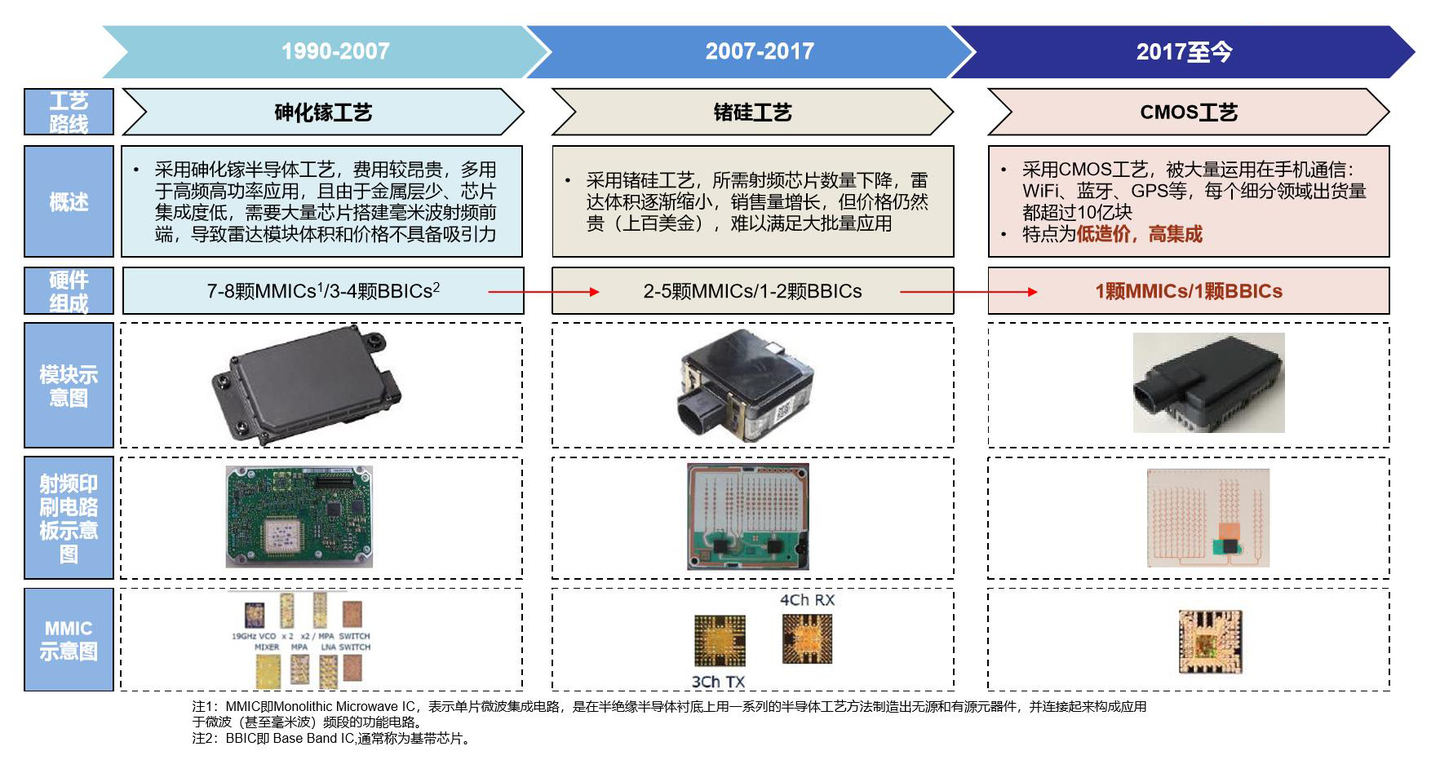
下图是车载毫米波雷达的发展脉络,可以看到,主要三个脉络(更早期的不再讨论):
-
基于SiGe芯片工艺的24GHz车载毫米波雷达发展,目前24GHz已经不再用于车载毫米波雷达上;
-
基于SiGe芯片工艺的76GHz-77GHz车载毫米波雷达发展,到了后期,RFCOMS工艺成熟,开始专项RFCMOS工艺;
-
基于RFCMOS芯片工艺的76GHz-81GHz车载毫米波雷达反正,并且开始出现片上天线或者片上波导口设计;

Ref:毫米波雷达成为ADAS标配,产业链技术解析 - 智能汽车资源网
2、当前行业现状
-
博世和大陆的五代MRR和SRR仍旧占据L2自动驾驶中雷达传感器的统治地位;
-
安波福和维宁尔的MRR和SRR属于L2自动驾驶中雷达传感器的第二梯队供应商;海拉主要是在SRR领域走量比较大;

-
国内供应商森思泰克、华域、楚航目前看是比较稳健的第一梯队,但MRR和SRR的技术水平还是与global 供应商有一定的差距;

Ref:国内35家毫米波雷达供应商一览,华域|德赛西威|华为|大疆等齐上榜 - 智能汽车资源网

-
全行业的雷达目前主要都是TI、NXP、Infineon的芯片解决方案,国产加特兰的芯片也在积极扩展市场,具体如下:
| 芯片厂商 | 5代 2019 | 6代2024 | 4D | Tier1 |
|---|---|---|---|---|
| NXP | TEF810X(Dolphin) + S32R2X:3发4收 | TEF820X(Barracuda) + S32R2X:3发4收 | TEF820X(×2或×4) + S32R41或S32R294 | 大陆(4代,5代)、安波福、楚航 |
| Infineon | RXS8160+TC3XX:3发4收 | RXS8161+TC3XX:3发4收 | RXS8161(×2或×4)+TC397A | 博世(4代,5代)、华为 |
| TI | AWR1843:3发4收 | AWR2943/4:3发4收/4发4收 | AWR2243(×2或×4)+AM2732 | 森斯泰克、维宁尔、大陆(6代) |
| 加特兰 | Alps:4发4收 | Alps pro:4发4收 | Andes(×2或×4,集成处理器) | 承泰 |
除了以上几家,Global 还有Arbe,Uhnder等,但这几家都是面向4D雷达MMIC市场;
国内还有,但是目前看存活下来的比较少。

Ref:汽车毫米波雷达芯片厂商盘点 - 智能汽车资源网
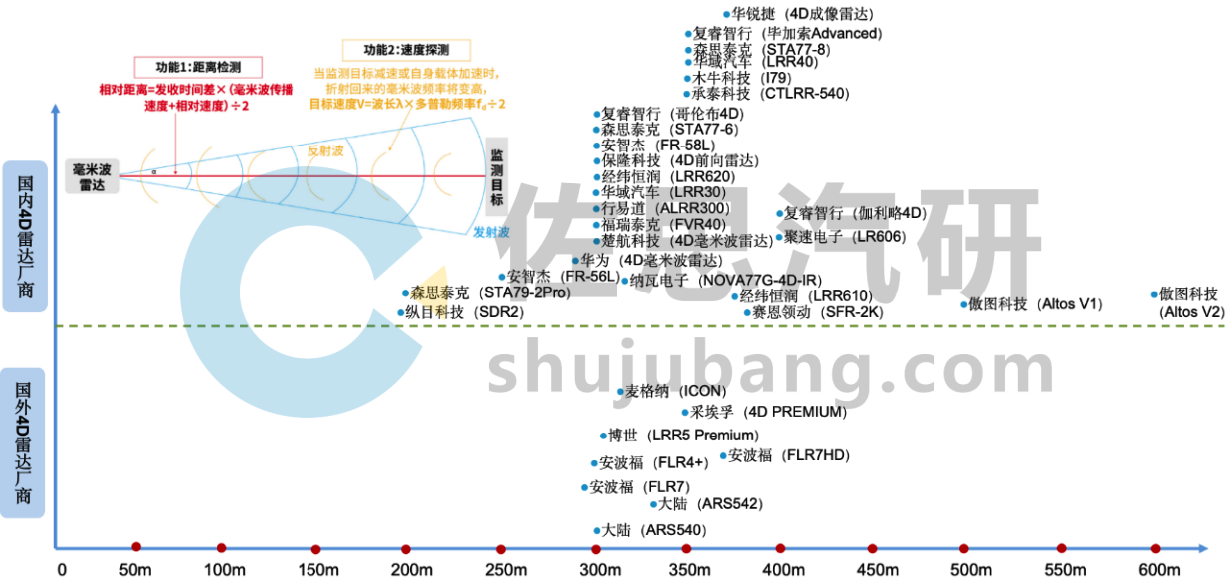
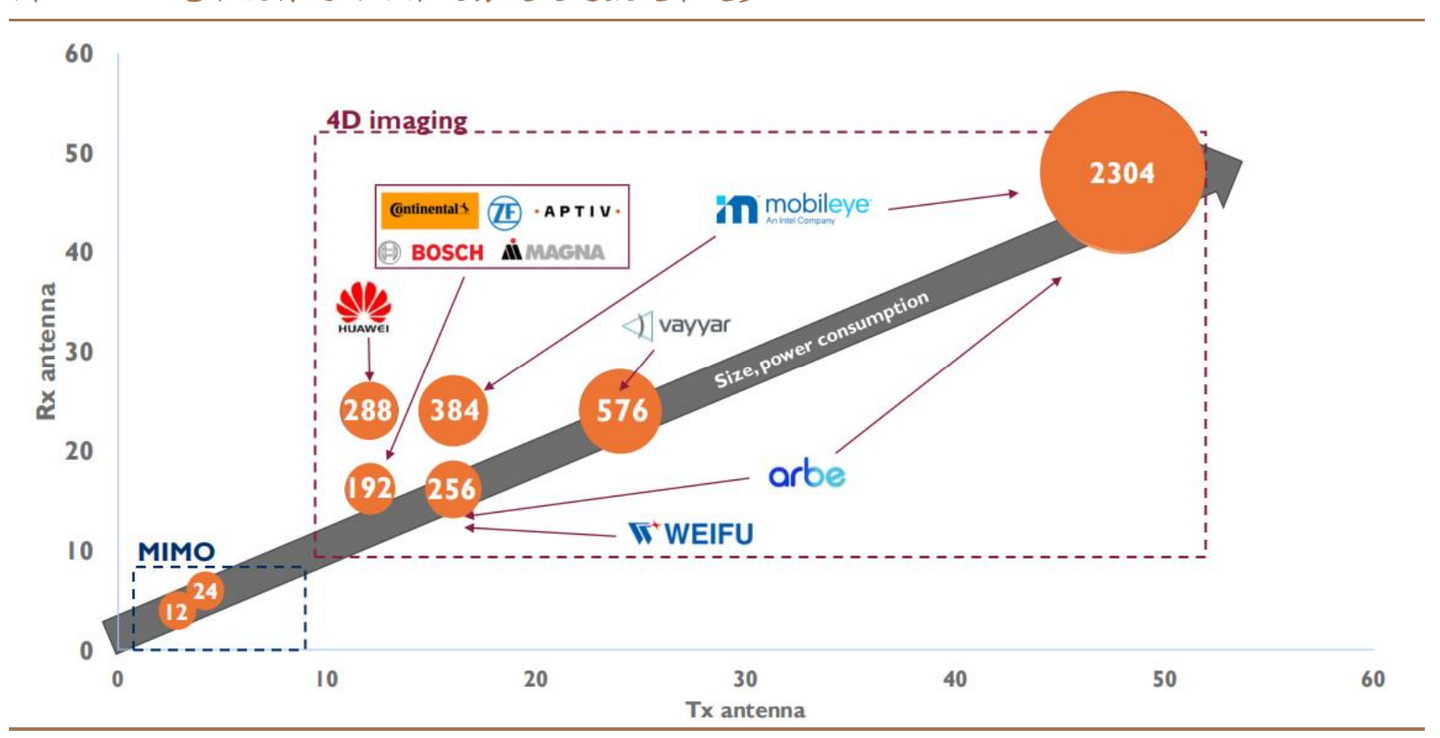
3、4D毫米波雷达行业现状
相较3D毫米波雷达,4D雷达(距离、速度、水平方位角、垂直高度)通过增加发射、接收通道的个数,提供点云的功能,从3T4R(12信道)到6T8R(48信道)再到12T16R(192信道)甚至到48T48R(2304信道),点云成像的精度持续提升,逐渐实现对传统毫米波雷达的替代;在多颗雷达组网的情况下,实现对激光雷达的部分替代。
Ref:https://pdf.dfcfw.com/pdf/H3_AP202309071598013225_1.pdf
Ref:https://db.shujubang.com/home/login/index/gid/20957
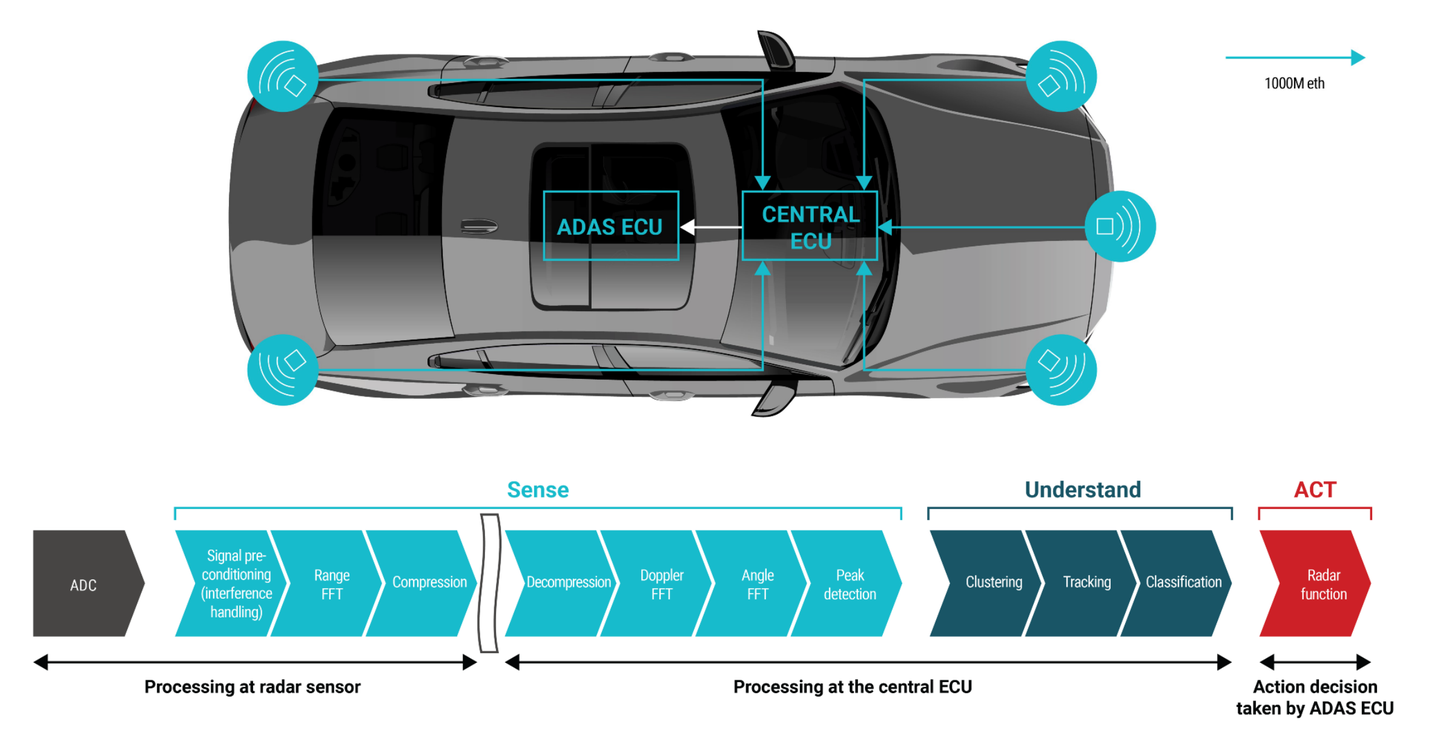
4、分布式卫星雷达行业现状
只有前端MMIC,Raw Data或者1DFFT后数据直接通过Serdes到中央域控,所有Radar段的DSP处理都在中央域控上,目前还在萌芽起步阶段,需要中央域控端以及算法段的适配。