磁共振成像原理(理论):信号产生和探测(3)
下面是磁共振成像原理(理论)部分的主要内容,请按照顺序阅读
- [[信号产生和探测]],包括基本物理原理
- [[信号的特征]],包括自由感应衰减FID,射频回波,梯度回波等
- [[信号定位]],包括选层,频率编码,相位编码以及K空间
- [[图像重建]]
- [[图像对比度]]
- [[图像分辨率,噪声和伪影]]
- [[快速扫描成像介绍]]
本篇主要介绍信号的产生和探测。这是第三部分,布洛赫方程。
布洛赫方程 (Bloch Equation)
布洛赫方程的一般形式如下:
dM⃗dt=γM⃗×B⃗−Mxi⃗+Myj⃗T2−(Mz−Mz0)k⃗T1(3.69)\frac{d\vec{M}}{dt} = \gamma \vec{M} \times \vec{B} - \frac{M_x \vec{i} + M_y \vec{j}}{T_2} - \frac{(M_z - M_z^0)\vec{k}}{T_1} \tag {3.69} dtdM=γM×B−T2Mxi+Myj−T1(Mz−Mz0)k(3.69)
上式中,Mz0M_z^0Mz0 是宏观磁化强度M⃗\vec MM 在外磁场B0B_0B0 的作用下的热平衡态幅值,请参考式子(3.39), 分别是横向和纵向弛豫时间,表示被扰动后恢复热平衡态的时间常数;一般来说射频脉冲时间远小于 T1,T2T_1,T_2T1,T2 ,所以在射频脉冲作用期间,我们忽略弛豫的影响,所以式子(3.69)可以进一步被简化:
dM⃗dt=γM⃗×B⃗(3.70)\frac{d\vec{M}}{dt} = \gamma \vec{M} \times \vec{B} \tag{3.70}dtdM=γM×B(3.70)
大家可能会注意到,这个式子和式子(3.15)dμ⃗dt=γμ⃗×B0k⃗\frac{d\vec{\mu}}{dt} = \gamma \vec{\mu} \times B_0 \vec{k}dtdμ=γμ×B0k 很接近,在这里将式子(3.67)代入到(3.70)中,可以得到:
∂M⃗rot∂t=γM⃗rot×B⃗eff(3.72)\frac{\partial \vec{M}_{\text{rot}}}{\partial t} = \gamma \vec{M}_{\text{rot}} \times \vec{B}_{\text{eff}} \tag {3.72}∂t∂Mrot=γMrot×Beff(3.72)
其中
B⃗eff=B⃗rot+ω⃗γ(3.73)\vec{B}_{\text{eff}} = \vec{B}_{\text{rot}} + \frac{\vec{\omega}}{\gamma} \tag {3.73}Beff=Brot+γω(3.73)
有效磁场B⃗eff\vec{B}_{\text{eff}}Beff 表示宏观磁化强度在旋转坐标系下“感受到”的磁场。当B⃗=B0k⃗\vec B = B_0 \vec kB=B0k ,同时 ω⃗=−γB0k⃗\vec \omega = - \gamma B_0 \vec kω=−γB0k ,所以在仅有B0B_0B0时,系统终会恢复到热平衡态,此时宏观磁化强度的变化率为0.
B⃗eff=B⃗rot−γB0k⃗γ=B0k⃗−B0k⃗=0(3.74)
\vec{B}_{\text{eff}} = \vec{B}_{\text{rot}} - \frac{\gamma B_{0} \vec{k}}{\gamma} = B_{0} \vec{k} - B_{0} \vec{k} = 0
\tag{3.74}
Beff=Brot−γγB0k=B0k−B0k=0(3.74)
共振激发 On-Resonance Excitations
回顾式子(3.50)B⃗1(t)=B1e(t)[cos(ωrft+φ)i⃗−sin(ωrft+φ)j⃗]\vec{B}_{1}(t)=B_{1}^{e}(t)[\cos(\omega_{\mathrm{rf}}t+\varphi)\vec{i}-\sin(\omega_{\mathrm{rf}}t+\varphi)\vec{j}]B1(t)=B1e(t)[cos(ωrft+φ)i−sin(ωrft+φ)j],此时的射频频率时wrfw_{rf}wrf ,设初始相位为0,对其应用旋转变换(3.63)
B⃗1,rot=[cosωt−sinωtsinωtcosωt]B⃗1(t)=B1e(t)[cosωt−sinωtsinωtcosωt][cos(ωrf)−sin(ωrft)]\vec B_{1,rot} = \begin{bmatrix}
\cos \omega t & -\sin \omega t \\
\sin \omega t & \cos \omega t
\end{bmatrix}\vec{B}_{1}(t)=B_{1}^{e}(t)
\begin{bmatrix}
\cos \omega t & -\sin \omega t \\
\sin \omega t & \cos \omega t
\end{bmatrix}
\begin{bmatrix}\cos(\omega_{\mathrm{rf}}) \\
-\sin(\omega_{\mathrm{rf}}t)
\end{bmatrix}B1,rot=[cosωtsinωt−sinωtcosωt]B1(t)=B1e(t)[cosωtsinωt−sinωtcosωt][cos(ωrf)−sin(ωrft)]
化简可得
B⃗1,rot=B1e(t)[10]\vec B_{1,rot}=B_{1}^{e}(t)\begin{bmatrix}
1 \\
0
\end{bmatrix}B1,rot=B1e(t)[10]
即
B⃗1,rot=B1e(t)i′⃗(3.76)\vec B_{1,rot}=B_{1}^{e}(t) \vec {i'} \tag {3.76}B1,rot=B1e(t)i′(3.76)
式子(3.73)可得旋转坐标下等效磁场,将射频场页考虑在里面后,得到:
B⃗eff=B0k′⃗+B1e(t)i′⃗+ω⃗rfγ\vec{B}_{eff} = B_{0} \vec{k'} + B_{1}^{e}(t) \vec{i'} + \frac{\vec{\omega}_{rf}}{\gamma}Beff=B0k′+B1e(t)i′+γωrf
B⃗eff=(B0−ωrfγ)k⃗′+B1e(t)i⃗′(3.77)\vec{B}_{eff} = \left( B_{0} - \frac{\omega_{\text{rf}}}{\gamma} \right) \vec{k}^{\prime} + B_{1}^{e}(t) \vec{i}^{\prime}
\tag{3.77}
Beff=(B0−γωrf)k′+B1e(t)i′(3.77)
这里近一步引入共振激发条件,
wrf=w0=γB0(3.78)w_{rf}=w_0=\gamma B_0 \tag {3.78}wrf=w0=γB0(3.78)
然后得到:
B⃗eff=B1e(t)i⃗′(3.79)\vec{B}_{\text{eff}} = B_1^e(t) \vec{i}' \tag {3.79}Beff=B1e(t)i′(3.79)
将其代入式子(3.72),得:
∂M⃗rot∂t=γM⃗rot×B⃗eff=γM⃗rot×B1e(t)i⃗′(3.72)\frac{\partial \vec{M}_{\text{rot}}}{\partial t} = \gamma \vec{M}_{\text{rot}} \times \vec{B}_{\text{eff}}=\gamma \vec{M}_{\text{rot}} \times B_1^e(t) \vec{i}' \tag {3.72}∂t∂Mrot=γMrot×Beff=γMrot×B1e(t)i′(3.72)
矢量的外积,满足
{j⃗×k⃗=i⃗i⃗×k⃗=−j⃗k⃗×k⃗=0⃗\begin{cases}
\vec j \times \vec k = \vec i\\
\vec i \times \vec k = - \vec j\\
\vec k \times \vec k = \vec 0\\
\end{cases}⎩⎨⎧j×k=ii×k=−jk×k=0
分别对 i⃗′,j⃗′,k⃗′\vec{i}', \vec{j}', \vec{k}'i′,j′,k′ 三个方向单独求解,可得
{dMx′dt=0dMy′dt=γB1e(t)Mz′dMz′dt=−γB1e(t)My′(3.81)
\left\{
\begin{array}{l}
\frac{d M_{x^{\prime}}}{d t}=0 \\
\frac{d M_{y^{\prime}}}{d t}=\gamma B_{1}^{e}(t) M_{z^{\prime}} \\
\frac{d M_{z^{\prime}}}{d t}=-\gamma B_{1}^{e}(t) M_{y^{\prime}}
\end{array}
\right.
\tag{3.81}
⎩⎨⎧dtdMx′=0dtdMy′=γB1e(t)Mz′dtdMz′=−γB1e(t)My′(3.81)
引入初始化条件 Mx′=My′=0,Mz′=Mz0M_{x'}=M_{y'}=0, M_{z'}=M_z^{0}Mx′=My′=0,Mz′=Mz0 ,可解得:
{Mx′(t)=0My′(t)=Mz0sin(∫0tγB1e(t^)dt^)Mz′(t)=Mz0cos(∫0tγB1e(t^)dt^)(0≤t≤τp)(3.82)\begin{cases}
M_{x'}(t) = 0 \\
M_{y'}(t) = M_z^0 \sin\left( \int_0^t \gamma B_1^e(\hat{t}) d\hat{t} \right) \\
M_{z'}(t) = M_z^0 \cos\left( \int_0^t \gamma B_1^e(\hat{t}) d\hat{t} \right)
\end{cases} \quad (0 \leq t \leq \tau_p) \tag {3.82}⎩⎨⎧Mx′(t)=0My′(t)=Mz0sin(∫0tγB1e(t^)dt^)Mz′(t)=Mz0cos(∫0tγB1e(t^)dt^)(0≤t≤τp)(3.82)
可以看到,沿着实验室坐标系 xxx 方向的线性偏振射频场(3.48),它可以等效成一个圆偏振(3.50)。它在旋转坐标系下的等效磁场(3.76),是 x′x'x′方向的,因此它不会对x′x'x′方向的宏观磁化分量 Mx′M_{x'}Mx′有影响(同向矢量外积为0),而是对My′,Mz′M_{y'},M_{z'}My′,Mz′有影响。
当射频信号的包络是矩形波时:
B1e(t)=B1Π(t−τp/2τp)(3.83)
B_{1}^{e}(t)=B_{1}\Pi\left(\frac{t-\tau_{p}/2}{\tau_{p}}\right)
\tag{3.83}
B1e(t)=B1Π(τpt−τp/2)(3.83)
此时 (3.82) 变成:
{Mx′(t)=0My′(t)=Mz0sin(ω1t)0≤t≤τpMz′(t)=Mz0cos(ω1t)(3.84) \left\{ \begin{aligned} M_{x^{\prime}}(t) &= 0 \\ M_{y^{\prime}}(t) &= M_{z}^{0} \sin(\omega_{1} t) \quad 0 \leq t \leq \tau_{p} \\ M_{z^{\prime}}(t) &= M_{z}^{0} \cos(\omega_{1} t) \end{aligned} \right. \tag{3.84} ⎩⎨⎧Mx′(t)My′(t)Mz′(t)=0=Mz0sin(ω1t)0≤t≤τp=Mz0cos(ω1t)(3.84)
此时
ω⃗1=−γB⃗1(3.85)
\vec{\omega}_{1} = -\gamma \vec{B}_{1}
\tag{3.85}
ω1=−γB1(3.85)
可以看到,在此射频场的激发下:
- 如果在旋转坐标下下去观察,M⃗rot\vec M_{rot}Mrot 是以x′x'x′为轴在旋转,下图左。这也是为什么,我们需要建立旋转坐标系,因为在旋转坐标系下,很多现象会变得直接直观容易理解。
- 如果在实验室坐标下去观察,M⃗\vec MM 是以绕着zzz 轴旋转的同时,也绕着xxx为轴在进动(precession),下图右
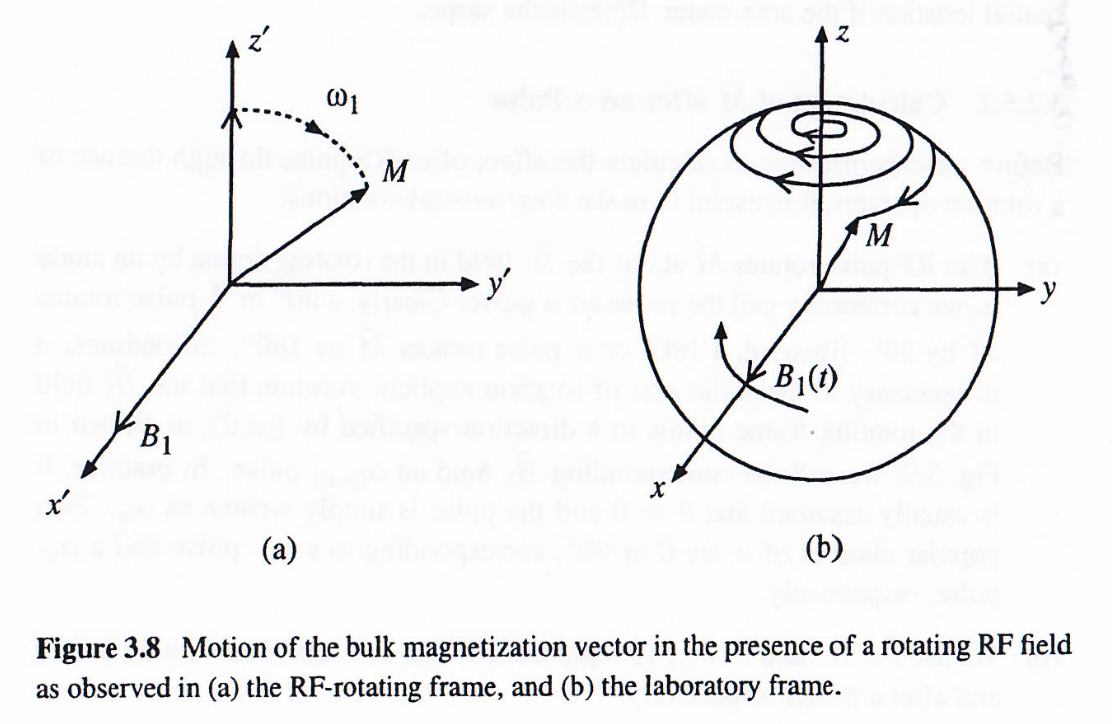
在仅有外部静态磁场B⃗0\vec B_0B0时,且当系统处于热平衡时,宏观磁化强度M⃗\vec MM在 x,yx,yx,y上的相互抵消,仅表现出zzz方向的分量。即使在旋转坐标系中中去观察,M⃗rot\vec M_{rot}Mrot 也仅余下z′z'z′ 方向的分量。当存在外部的射频场时,且满足共振条件,就会使得宏观磁化M⃗rot\vec M_{rot}Mrot 绕着 x′x'x′ 旋转。这使得M⃗rot\vec M_{rot}Mrot 的z′z'z′ 方向的分量逐渐翻转到x′y′x'y'x′y′平面(见式(3.84))。这个翻转角度 α\alphaα 决定了翻转量:
α=∫0τpω1(t)dt=∫0τpγB1e(t)dt(3.86)\alpha = \int_0^{\tau_p} \omega_1(t) dt = \int_0^{\tau_p} \gamma B_1^e(t) dt \tag {3.86} α=∫0τpω1(t)dt=∫0τpγB1e(t)dt(3.86)
对于矩形波而言,翻转角度和射频激发时间时线性关系的:
α=ω1τp=γB1τp(3.87)\alpha = \omega_1 \tau_p = \gamma B_1 \tau_p \tag {3.87}α=ω1τp=γB1τp(3.87)
举个例子,对质子而言,当τp=0.1ms,B1=0.6G\tau_p=0.1 ms, B_1 = 0.6Gτp=0.1ms,B1=0.6G 时,翻转角度 α=π2\alpha=\frac {\pi} {2}α=2π, 此时恰好可以把Mz0M_{z}^{0}Mz0 全部翻转为 My′(t)M_{y^{\prime}}(t)My′(t) (将α=π2\alpha=\frac {\pi} {2}α=2π 代入式3.84)。
积分复现性初涉 (Reproducibility)
同时我们也需要注意到,翻转角度 α\alphaα 同时取决于射频场的幅度以及激发持续时间, 同时需要注意到(见式3.86),B1e(t)B_1^e(t)B1e(t) 包络的形状并不重要,重要的是包络下的面积。也就是说,不同的包络会让上述翻转有不同的轨迹,但是当脉冲结束后的停留位置(翻转角度)是一样的,只要包络面积相同。这就是功放设备对射频场和梯度场的一个重要的需求,也就是积分复现性,即要求在扫描期间,让射频场和梯度场的包络面积具备一定的重复性。
下面看一下,射频场 α\alphaα 脉冲激发后的宏观强化矢量 M⃗\vec MM 如何计算。开始前,我们介绍一套符号:
- 用 αx′\alpha_{x'}αx′ 表示沿着旋转坐标系 x′x'x′ 方向的射频脉冲, αy′\alpha_{y'}αy′,αz′\alpha_{z'}αz′ 表示 y′,z′y', z'y′,z′ 方向的射频脉冲。
- 用 t=0−,t=0+t=0_-,t=0_+t=0−,t=0+ 表示射频脉冲前后时刻
- 用 →\rightarrow→ 表示通用的自旋进动操作
下面举个例子:
Mx′(0−)→αx′Mx′(0+)(3.88) M_{x^{\prime}}(0_{-})\xrightarrow{\alpha_{x^{\prime}}}M_{x^{\prime}}(0_{+}) \tag {3.88}Mx′(0−)αx′Mx′(0+)(3.88)
它表示,一个 αx′\alpha_{x'}αx′ 脉冲让Mx′(0−)M_{x^{\prime}}(0_{-})Mx′(0−) 变成 Mx′(0+)M_{x^{\prime}}(0_{+})Mx′(0+)
基于公式(3.82),用α\alphaα 来代替积分后,得到热平衡后的变换关系,此时Mx′(0−)=0M_{x^{\prime}}(0_{-})=0Mx′(0−)=0,My′(0−)=0M_{y^{\prime}}(0_{-})=0My′(0−)=0
{Mx′(0+)=0My′(0+)=Mz0sinαMz′(0+)=Mz0cosα(3.89)
\begin{cases}
M_{x^{\prime}}(0_{+}) = 0 \\
M_{y^{\prime}}(0_{+}) = M_{z}^{0}\sin\alpha \\
M_{z^{\prime}}(0_{+}) = M_{z}^{0}\cos\alpha
\end{cases}
\tag{3.89}
⎩⎨⎧Mx′(0+)=0My′(0+)=Mz0sinαMz′(0+)=Mz0cosα(3.89)
而更通用的是非热平衡下的射频激发引入的变换
{Mx′(0+)=Mx′(0−)My′(0+)=My′(0−)cosα+Mz′(0−)sinαMz′(0+)=−My′(0−)sinα+Mz′(0−)cosα(3.90)
\begin{cases}
M_{x^{\prime}}(0_{+}) = M_{x^{\prime}}(0_{-}) \\
M_{y^{\prime}}(0_{+}) = M_{y^{\prime}}(0_{-})\cos\alpha + M_{z^{\prime}}(0_{-})\sin\alpha \\
M_{z^{\prime}}(0_{+}) = -M_{y^{\prime}}(0_{-})\sin\alpha + M_{z^{\prime}}(0_{-})\cos\alpha
\end{cases}
\tag{3.90}
⎩⎨⎧Mx′(0+)=Mx′(0−)My′(0+)=My′(0−)cosα+Mz′(0−)sinαMz′(0+)=−My′(0−)sinα+Mz′(0−)cosα(3.90)
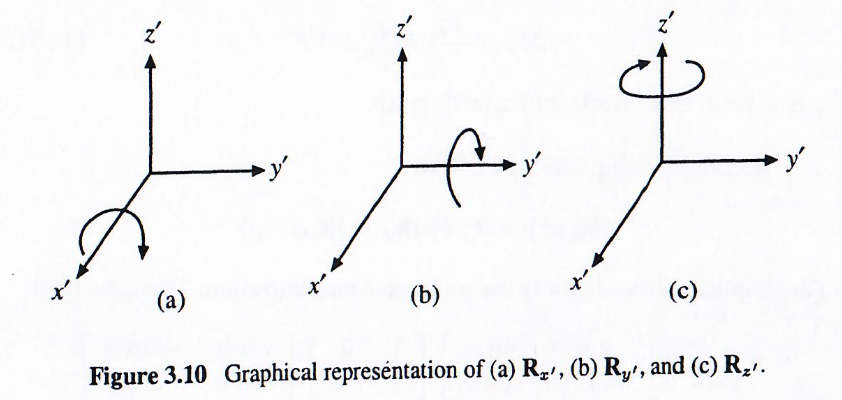
之前定义的都是x′x'x′方向的,我们用更加紧凑的旋转操作矩阵形式来表示变换关系,不同轴分别是:
x′x'x′方向:
Rx′(α)=[1000cosαsinα0−sinαcosα](3.91)R_{x'}(\alpha) =
\begin{bmatrix}
1 & 0 & 0 \\
0 & \cos \alpha & \sin \alpha \\
0 & -\sin \alpha & \cos \alpha
\end{bmatrix} \tag {3.91}Rx′(α)=1000cosα−sinα0sinαcosα(3.91)
y′y'y′方向
Ry′(α)=[cosα0−sinα010sinα0cosα](3.92)R_{y'}(\alpha) =
\begin{bmatrix}
\cos \alpha & 0 & -\sin \alpha \\
0 & 1 & 0 \\
\sin \alpha & 0 & \cos \alpha
\end{bmatrix} \tag {3.92}Ry′(α)=cosα0sinα010−sinα0cosα(3.92)
z′z'z′方向
Rz′(α)=[cosαsinα0−sinαcosα0001](3.93)R_{z'}(\alpha) =
\begin{bmatrix}
\cos \alpha & \sin \alpha & 0 \\
-\sin \alpha & \cos \alpha & 0 \\
0 & 0 & 1
\end{bmatrix} \tag {3.93}Rz′(α)=cosα−sinα0sinαcosα0001(3.93)
下面用矩阵来展示沿着 x′,y′x',y'x′,y′ 方向的射频脉冲对宏观磁化矢量的变换计算,注意是旋转坐标系下。
M⃗rot(0+)→αx′Rx′(α)M⃗rot(0−)(3.94a)
\vec{M}_{\text{rot}}\left(0_{+}\right) \xrightarrow{\alpha_{x^{\prime}}} \mathbf{R}_{x^{\prime}}(\alpha) \vec{M}_{\text{rot}}\left(0_{-}\right) \tag {3.94a}
Mrot(0+)αx′Rx′(α)Mrot(0−)(3.94a)
M⃗rot(0+)→α−x′R−x′(α)M⃗rot(0−)=Rx′(−α)M⃗rot(0−)(3.94b)
\vec{M}_{\text{rot}}\left(0_{+}\right) \xrightarrow{\alpha_{-x^{\prime}}} \mathbf{R}_{-x^{\prime}}(\alpha) \vec{M}_{\text{rot}}\left(0_{-}\right)=\mathbf{R}_{x^{\prime}}(-\alpha) \vec{M}_{\text{rot}}\left(0_{-}\right) \tag {3.94b}
Mrot(0+)α−x′R−x′(α)Mrot(0−)=Rx′(−α)Mrot(0−)(3.94b)
M⃗rot(0+)→αy′Ry′(α)M⃗rot(0−)(3.94c)
\vec{M}_{\text{rot}}\left(0_{+}\right) \xrightarrow{\alpha_{y^{\prime}}} \mathbf{R}_{y^{\prime}}(\alpha) \vec{M}_{\text{rot}}\left(0_{-}\right) \tag {3.94c}
Mrot(0+)αy′Ry′(α)Mrot(0−)(3.94c)
M⃗rot(0+)→α−y′R−y′(α)M⃗rot(0−)=Ry′(−α)M⃗rot(0−)(3.94d)\vec{M}_{\text{rot}}\left(0_{+}\right) \xrightarrow{\alpha_{-y^{\prime}}} \mathbf{R}_{-y^{\prime}}(\alpha) \vec{M}_{\text{rot}}\left(0_{-}\right)=\mathbf{R}_{y^{\prime}}(-\alpha) \vec{M}_{\text{rot}}\left(0_{-}\right) \tag {3.94d}Mrot(0+)α−y′R−y′(α)Mrot(0−)=Ry′(−α)Mrot(0−)(3.94d)
而沿着x′y′x'y'x′y′ 平面(和x′x'x′的夹角为φ\varphiφ)的任意射频脉冲,则不能直接把它分解成x′,y′x',y'x′,y′ 两个变换的叠加。而应该用:
- 将旋转坐标系的x′x'x′轴,沿着z′z'z′轴旋转−φ-\varphi−φ,旋转后使得x′x'x′轴和射频同向------Rz′(−φ)R_{z'}(-\varphi)Rz′(−φ)
- 此时再利用αx′\alpha_{x'}αx′完成激发变换------Rx′(α)R_{x'}(\alpha)Rx′(α)
- 将旋转坐标系的x′x'x′轴,沿着z′z'z′轴旋转φ\varphiφ恢复第一步的变换------Rz′(φ)R_{z'}(\varphi)Rz′(φ)
M⃗rot(0+)=Rz′(φ)Rx′(α)Rz′(−φ)M⃗rot(0−)(3.95)\vec{M}_{\text{rot}}(0_+) = R_{z'}(\varphi) R_{x'}(\alpha) R_{z'}(-\varphi) \vec{M}_{\text{rot}}(0_-) \tag {3.95}Mrot(0+)=Rz′(φ)Rx′(α)Rz′(−φ)Mrot(0−)(3.95)