【嵌入式电机控制#进阶6】三段启动法
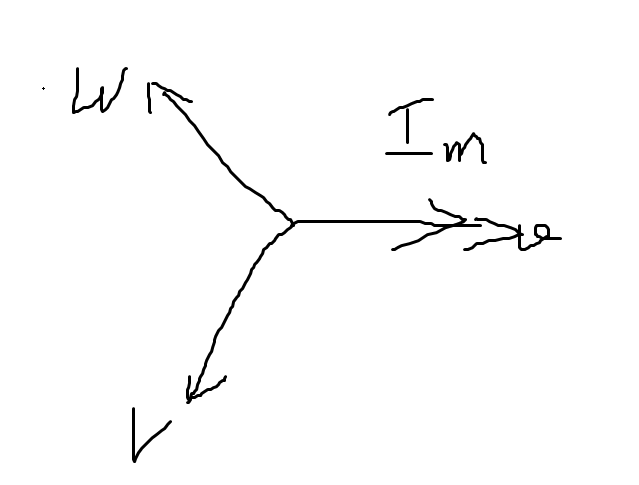
一、转子定位
这里借用有感编码器校准的方法,施加一个幅值足够大,方向不变的磁通。将转子锁在一个确定的位置。
实际中通过不断调试确定幅值。
二、 外同步加速
确定转子初始位置后,由于此时定子绕组反电动势还是0(没有磁通变化),所以需要在此基础上让单片机主动改变电机外施电压和换相信号,使得电机从静止逐步加速,称为外同步加速。
开环状态下,能影响电机转速的有两个量,一是占空比,二是换相触发频率
(这里需要注意,在无刷开环中,换相信号只能由单片机内部发出。它本身不一定是PWM波的频率,但是你可以笼统的理解为它的频率可以影响PWM波)
外同步加速分为三类:
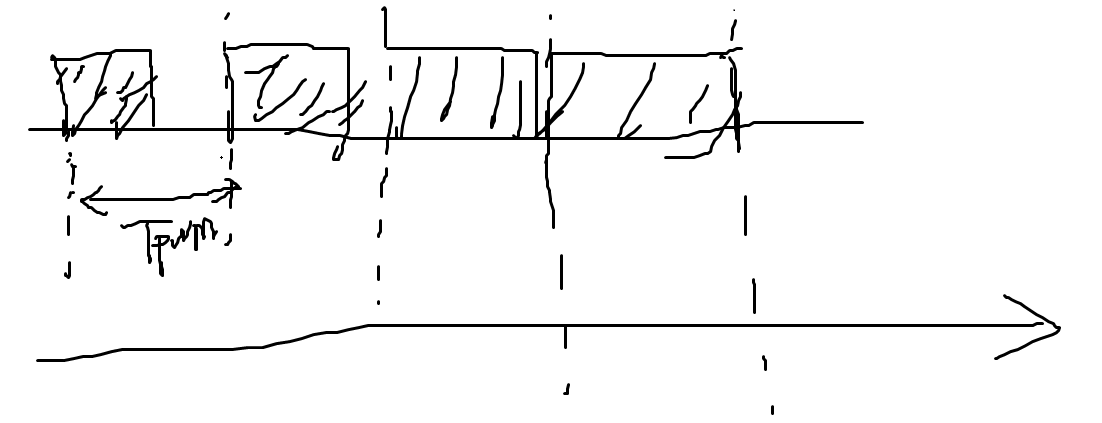
1. 换相触发频率(fphase)不变,逐步增大外加电压(Duty)让电机加速,称为恒频升压
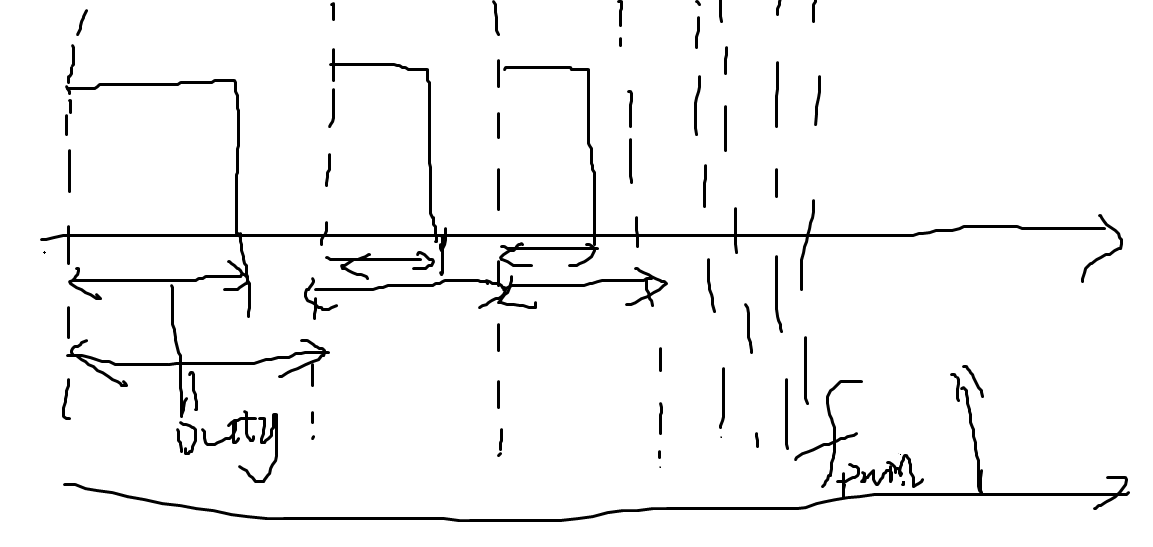
2. 保证外加电压不变,逐步增大换相信号频率,让电机逐步加速,叫做恒压升频
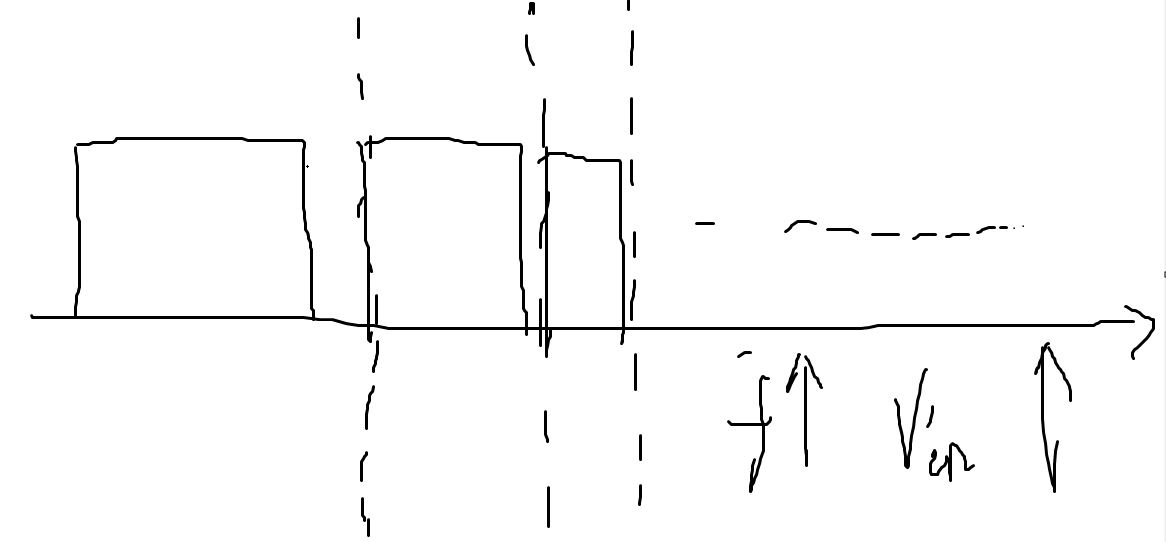
3. 在逐步增大外加电压的同时,增高换相频率,称为升压升频
此外,根据具体开环控制量的选取,还可分为V/F强拖控制和I/F强拖控制
三、 模式切换
观察波形,确定一个最保险的时间,能够确保电机加速启动到反电动势曲线与过零点能被准确检测出来。具体实现逻辑有两种:
(1)设定一个目标转速,达到这个转速后模式切换
(2)通过经验数据确定安全时间,通过软件定时切换