Autosar之DCM模块
一、DCM介绍
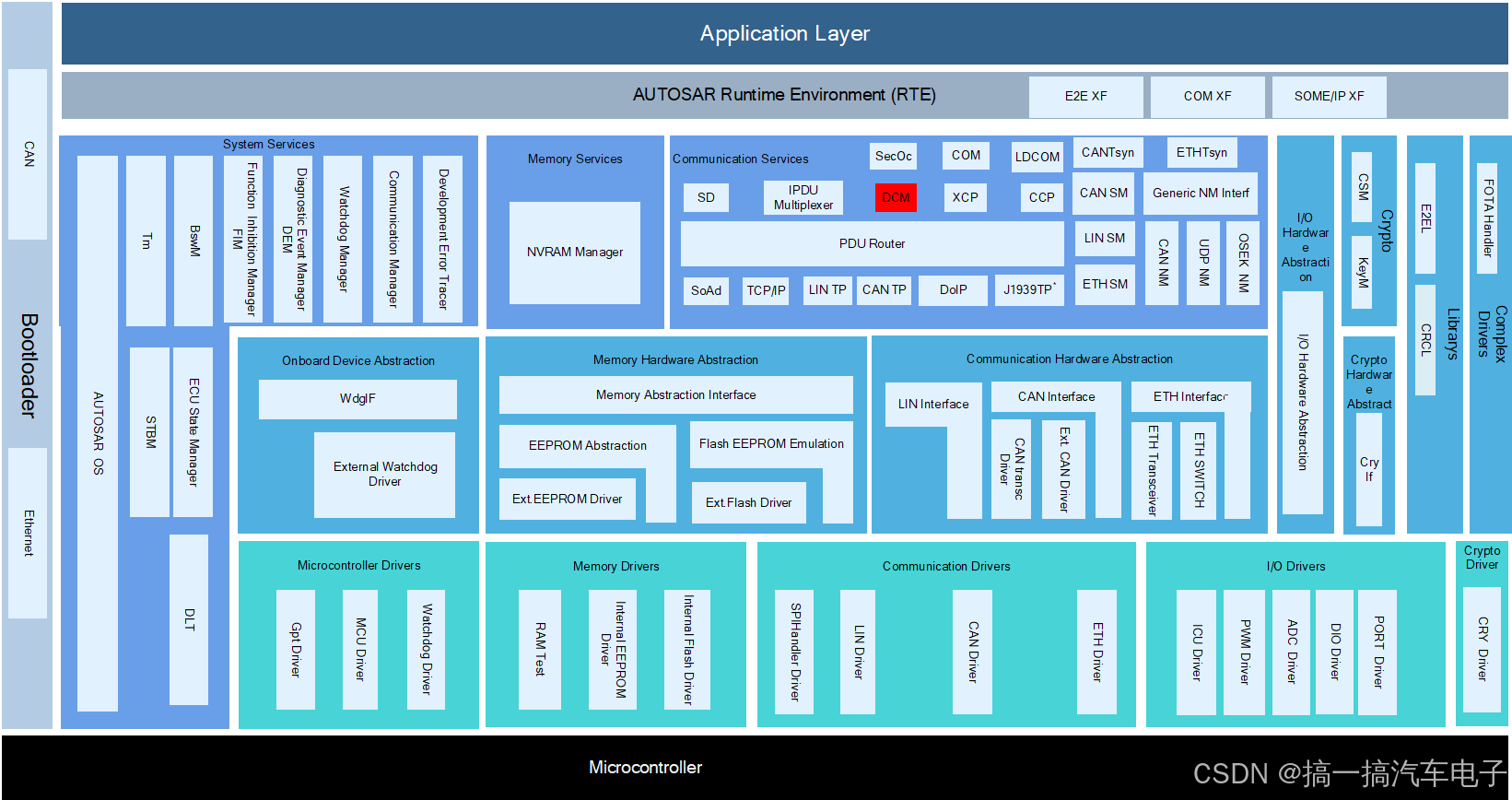
DCM(Diagnostic Communication Manager)是AUTOSAR(汽车开放系统架构)基础软件BSW中服务层(Service Layer)的核心模块,其核心功能是为车辆电子控制单元(ECU)提供符合行业标准(如ISO 14229 UDS、ISO 15765 DoCAN、ISO 15031 OBD等)的诊断服务支持,为开发和生产阶段提供与诊断仪交互的诊断服务,如下图所示
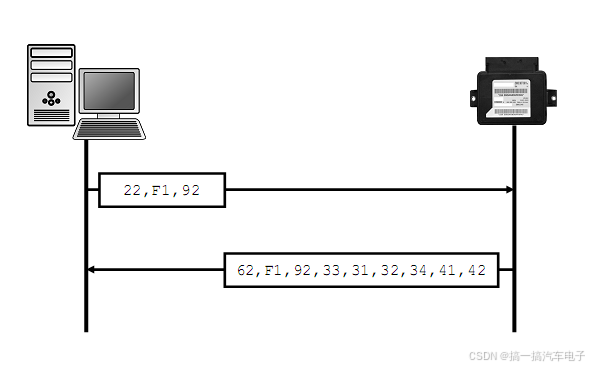
Dcm模块实现依据ISO 14229-1和ISO 15031-5等标准规范中定义的UDS诊断和OBD诊断功能。在接收到一个诊断请求后,需要对诊断请求进行分析,包括请求的服务是否支持,寻址方式是否正确,会话级,安全级,长度,子服务等是否正确。
其主要功能包括:
诊断数据流
管理诊断状态(诊断会话状态和安全访问等级状态)
检查诊断服务的请求是否满足条件
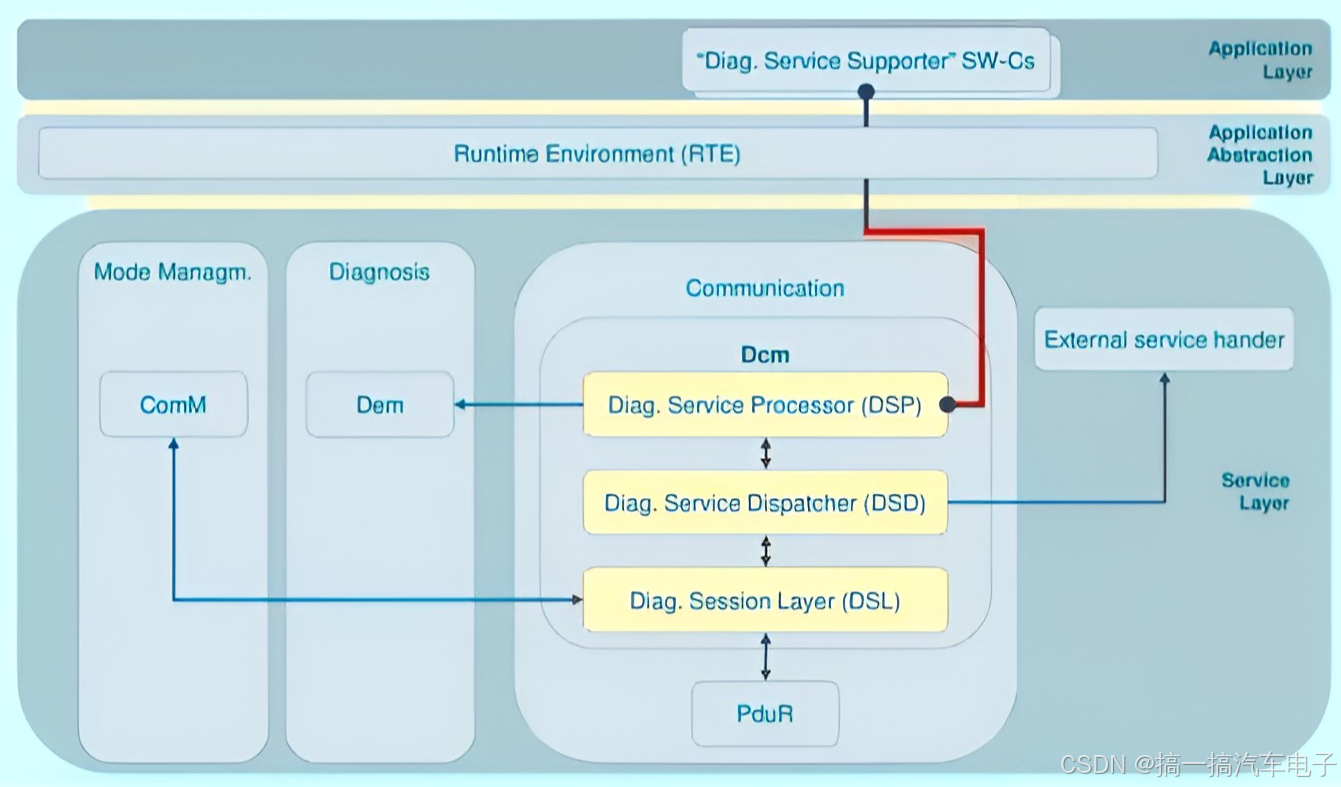
DCM模块由三个子模块构成,分别是DSL(DiagnosticSession layer)、DSD(Diagnostic Service Dispatcher)、DSP(Diagnostic Service Processing),如下图所示,接下来将针对三个子模块功能进行讲解
二、诊断会话层(DSL)
DSL模块主要用于诊断请求的处理及诊断时序的控制,管理诊断状态(诊断会话和安全状态)等,具体存在几个功能如下:
处理诊断请求:收到请求时,PduR会调用Dcm_StartOfReception()和Dcm_CopyRxData()接口将诊断请求数据从下层的Buffer中Copy到DCM的接收Buffer中。PduR调用Dcm_TpRxIndication()接口通知Dcm模块接收到了新的诊断请求
处理诊断响应:当需要响应诊断请求时,DLS通过调用通过调用PduR_DcmTransimit()和Dcm_CopyTxData()接口,将数据传递至PduR中,其中PduR_DcmTransimit()接口只是传递长度信息、地址信息,数据是通过Dcm_CopyTxData()接口传递至PduR,当数据传输成功后,PduR通过调用Dcm_TpTxConfirmation()接口告知DCM数据接收成功。
管理安全等级:通过Dcm_GetSecurityLevel()和DslInternal_SetSecurityLevel()两个接口分别用于获取当前的安全等级和设置安全等级
在配置层面,DSL(Diag Session Layer)的配置参数主要包括以下几个方面:
诊断帧配置:涵盖物理寻址和功能寻址的设置
通信缓冲区配置:定义单次通信中允许的最大Buffer大小
时间参数配置:
回复0x78的时间设置
为防止诊断服务异常,允许0x78的最大次数。
这些参数的合理配置对于确保诊断通信的稳定性和可靠性至关重要
三、诊断分发层(DSD)
DSD模块主要用于诊断服务的分配、服务执行环境及条件,会从接收的数据识别请求的服务类型(如0x10、0x27、0x22等),主要功能如下:
检查诊断服务:当诊断会话层(DSL)接收到新的诊断请求时,它会通过内部接口通知诊断服务调度器(DSD),如图所示。DSD 会调用 Dcm_GetSesCtrlType() 和 Dcm_GetSecurityLev