【涂鸦T5】2. 光感bh1750
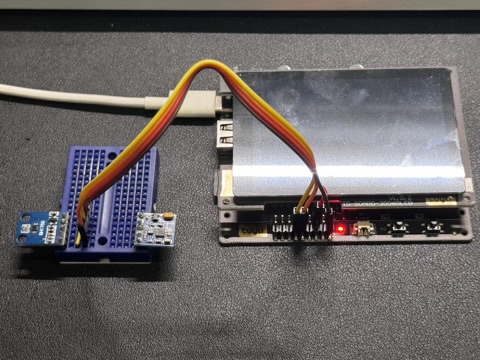
硬件连接
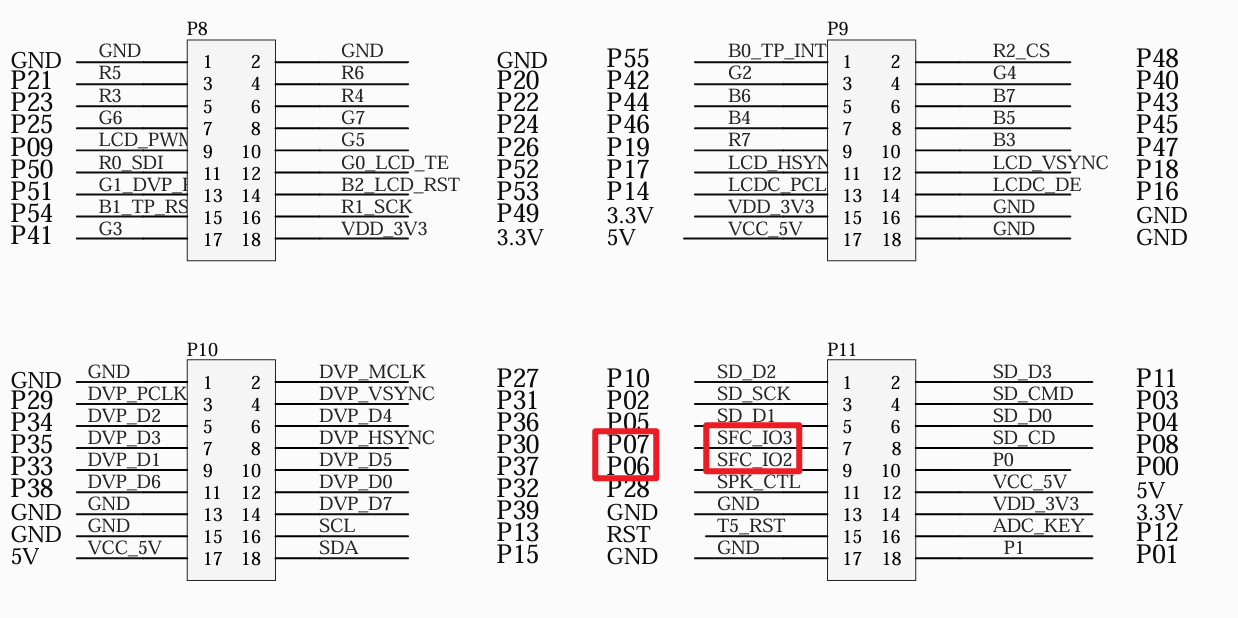
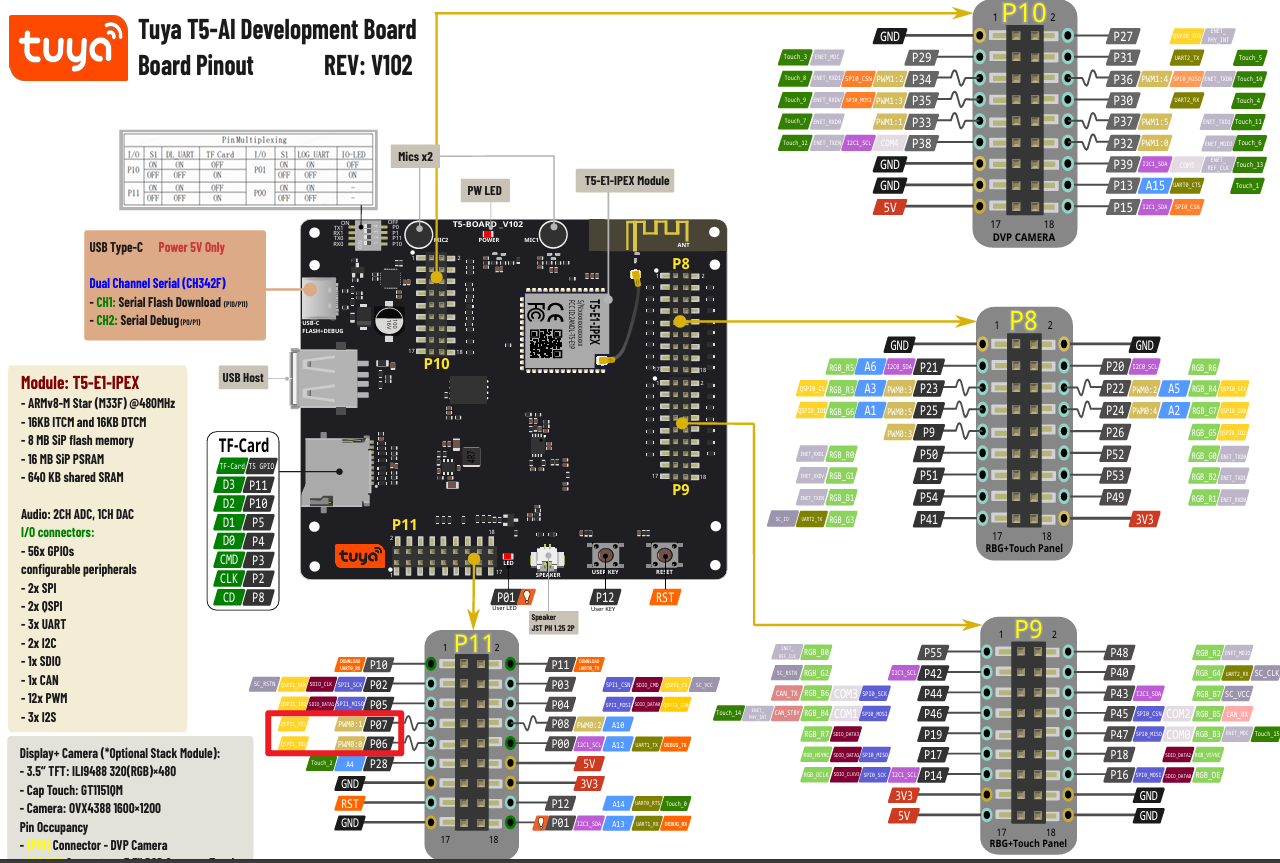
开发板如果接上屏幕,只有J11可以使用,而其中很多引脚都有被使用。
可以使用pin6/7,电路图上是给flash用的,但是问了官方,表示T5-board没有上件flash。
这两个信号可以作为i2c。
软件i2c,pin可以软件配置成i2c。
代码
我这里只是设置了一种模式,感兴趣可以增加接口切换模式
主要为了熟悉i2c设备的通信
01_i2c.c
#include "tuya_cloud_types.h"
#include "tal_api.h"
#include "tkl_output.h"
#include "tkl_gpio.h"
#include "tkl_i2c.h"
#include "tkl_pinmux.h"
#include "tal_cli.h"/***********************************************************
*************************micro define***********************
***********************************************************/
#ifndef EXAMPLE_I2C_SCL_PIN
#define EXAMPLE_I2C_SCL_PIN TUYA_GPIO_NUM_7
#endif#ifndef EXAMPLE_I2C_SDA_PIN
#define EXAMPLE_I2C_SDA_PIN TUYA_GPIO_NUM_6
#endif#define TASK_GPIO_PRIORITY THREAD_PRIO_2
#define TASK_GPIO_SIZE 4096#define I2C_SENSOR_BH1750 0
// #define I2C_SENSOR_SHT4X 1#define I2C_EXAMPLE_SENSOR_TYPE I2C_SENSOR_BH1750
/***********************************************************
***********************typedef define***********************
***********************************************************//***********************************************************
***********************variable define**********************
***********************************************************/
static THREAD_HANDLE sg_i2c_handle;/***********************************************************
***********************function define**********************
***********************************************************//*** @brief i2c task** @param[in] param:Task parameters* @return none*/
static void __example_i2c_task(void *param)
{OPERATE_RET op_ret = OPRT_OK;TUYA_IIC_BASE_CFG_T cfg;tal_log_init(TAL_LOG_LEVEL_DEBUG, 1024, (TAL_LOG_OUTPUT_CB)tkl_log_output);PR_NOTICE("Application information:");PR_NOTICE("Project name: %s", PROJECT_NAME);PR_NOTICE("App version: %s", PROJECT_VERSION);PR_NOTICE("Compile time: %s", __DATE__);PR_NOTICE("TuyaOpen version: %s", OPEN_VERSION);PR_NOTICE("TuyaOpen commit-id: %s", OPEN_COMMIT);PR_NOTICE("Platform chip: %s", PLATFORM_CHIP);PR_NOTICE("Platform board: %s", PLATFORM_BOARD);PR_NOTICE("Platform commit-id: %s", PLATFORM_COMMIT);tkl_io_pinmux_config(EXAMPLE_I2C_SCL_PIN, TUYA_IIC0_SCL);tkl_io_pinmux_config(EXAMPLE_I2C_SDA_PIN, TUYA_IIC0_SDA);/*i2c init*/cfg.role = TUYA_IIC_MODE_MASTER;cfg.speed = TUYA_IIC_BUS_SPEED_100K;cfg.addr_width = TUYA_IIC_ADDRESS_7BIT;op_ret = tkl_i2c_init(TUYA_I2C_NUM_0, &cfg);if (OPRT_OK != op_ret) {PR_ERR("i2c init fail, err<%d>!", op_ret);}int cnt = 0;while (1) {PR_DEBUG("cnt is %d", cnt++);tal_system_sleep(1000);#if (I2C_EXAMPLE_SENSOR_TYPE == I2C_SENSOR_BH1750)uint16_t light = 0;extern OPERATE_RET bh1750_read_light(int port, uint16_t *light);op_ret = bh1750_read_light(TUYA_I2C_NUM_0, &light);if (op_ret != OPRT_OK) {PR_ERR("bh1750 read fail, err<%d>!", op_ret);continue;}PR_INFO("bh1750 light:%d.%d\n", light / 1000, light % 1000);
// #elif (I2C_EXAMPLE_SENSOR_TYPE == I2C_SENSOR_SHT4X)#endif}
}/*** @brief user_main** @return none*/
static void user_main(void)
{OPERATE_RET rt = OPRT_OK;tal_log_init(TAL_LOG_LEVEL_DEBUG, 1024, (TAL_LOG_OUTPUT_CB)tkl_log_output);PR_DEBUG("hello world\r\n");static THREAD_CFG_T thrd_param = {.priority = TASK_GPIO_PRIORITY, .stackDepth = TASK_GPIO_SIZE, .thrdname = "i2c"};TUYA_CALL_ERR_LOG(tal_thread_create_and_start(&sg_i2c_handle, NULL, NULL, __example_i2c_task, NULL, &thrd_param));// int cnt = 0;// while (1) {// PR_DEBUG("cnt is %d", cnt++);// tal_system_sleep(1000);// }
}/*** @brief main** @param argc* @param argv* @return void*/
#if OPERATING_SYSTEM == SYSTEM_LINUX
void main(int argc, char *argv[])
{user_main();
}
#else/* Tuya thread handle */
static THREAD_HANDLE ty_app_thread = NULL;/*** @brief task thread** @param[in] arg:Parameters when creating a task* @return none*/
static void tuya_app_thread(void *arg)
{user_main();tal_thread_delete(ty_app_thread);ty_app_thread = NULL;
}void tuya_app_main(void)
{THREAD_CFG_T thrd_param = {4096, 4, "tuya_app_main"};tal_thread_create_and_start(&ty_app_thread, NULL, NULL, tuya_app_thread, NULL, &thrd_param);
}
#endif
bh1750.c
/*** @file bh1750.c* @brief BH1750 sensor driver for Tuya IoT projects.** This file provides an implementation of a driver for the BH1750 sensor, which is a humidity and temperature sensor.* It demonstrates the configuration and usage of the BH1750 sensor using the Tuya SDK.* The example covers initializing the sensor, sending commands to the sensor, and reading data from the sensor.** The BH1750 sensor driver aims to help developers understand how to interface with the BH1750 sensor in Tuya IoT* projects. It includes detailed examples of setting up sensor configurations, sending commands, and reading data from* the sensor.** @note This example is designed to be adaptable to various Tuya IoT devices and platforms, showcasing fundamental* sensor operations that are critical for IoT device development.** @copyright Copyright (c) 2021-2024 Tuya Inc. All Rights Reserved.**/#include "tuya_cloud_types.h"
#include "tal_api.h"
#include "tkl_output.h"
#include "tkl_i2c.h"/***********************************************************
*************************micro define***********************
***********************************************************/
#define CRC_OK (0)
#define CRC_ERR (-1)// #define BH1750_CMD_FETCH_DATA 0xE000 // readout measurements for periodic mode
// #define BH1750_CMD_MEAS_PERI_1_H 0x2130 // measurement: periodic 1 mps, high repeatability/*** @brief work status*/
#define BH1750_CLOSE 0
#define BH1750_OPEN (!BH1750_CLOSE)/*** @brief resource array index*/
#define BH1750_RSRC_INDEX_STAT 0
#define BH1750_RSRC_INDEX_ADDR 1
#define BH1750_RSRC_INDEX_PREC 2 // H-Resolution Mode/H-Resolution Mode2/L-Resolution
#define BH1750_RSRC_INDEX_FREQ 3 // one/continue
#define BH1750_RSRC_INDEX_RESL 4 // mode match value, such as H=1,H2=0.5,L=41/*** @brief I2C address list*/
#define SR_I2C_ADDR_BH1750_A 0x23 // BH1750 : ADDR pin - GND
#define SR_I2C_ADDR_BH1750_B 0x5c // BH1750 : ADDR pin - VCC/***********************************************************
***********************typedef define***********************
***********************************************************/#define BH1750_CMD_POWER_DOWN 0x00 // power down
#define BH1750_CMD_POWER_ON 0x01 // power on
#define BH1750_CMD_SOFT_RESET 0x07 // reset#define BH1750_CMD_CON_H_RES_MODE 0x10 // Continuously H-Resolution Mode
#define BH1750_CMD_CON_H_RES_MODE2 0x11 // Continuously H-Resolution Mode2
#define BH1750_CMD_CON_L_RES_MODE 0x13 // Continuously L-Resolution Mode
#define BH1750_CMD_ONE_H_RES_MODE 0x20 // One Time H-Resolution Mode
#define BH1750_CMD_ONE_H_RES_MODE2 0x21 // One Time H-Resolution Mode2
#define BH1750_CMD_ONE_L_RES_MODE 0x23 // One Time L-Resolution Mode// #define BH1750_CMD_SOFT_RESET 0x30A2 // soft reset
#define BH1750_CMD_READ_SERIALNBR 0x3780 // read serial number
#define BH1750_CMD_HEATER_ENABLE 0x306D // enabled heater
#define BH1750_CMD_HEATER_DISABLE 0x3066 // disable heater
#define BH1750_CMD_READ_STATUS 0xF32D // read status register
#define BH1750_CMD_CLEAR_STATUS 0x3041 // clear status register
#define BH1750_CMD_ART 0x2B32 // activate ART
#define BH1750_CMD_BREAK 0x3093 // stop periodic data acquisition mode
#define BH1750_CMD_FETCH_DATA 0xE000 // readout measurements for periodic mode
#define BH1750_CMD_MEAS_PERI_05_H 0x2032 // measurement: periodic 0.5 mps, high repeatability
#define BH1750_CMD_MEAS_PERI_05_M 0x2024 // measurement: periodic 0.5 mps, medium repeatability
#define BH1750_CMD_MEAS_PERI_05_L 0x202F // measurement: periodic 0.5 mps, low repeatability
#define BH1750_CMD_MEAS_PERI_1_H 0x2130 // measurement: periodic 1 mps, high repeatability
#define BH1750_CMD_MEAS_PERI_1_M 0x2126 // measurement: periodic 1 mps, medium repeatability
#define BH1750_CMD_MEAS_PERI_1_L 0x212D // measurement: periodic 1 mps, low repeatability
#define BH1750_CMD_MEAS_PERI_2_H 0x2236 // measurement: periodic 2 mps, high repeatability
#define BH1750_CMD_MEAS_PERI_2_M 0x2220 // measurement: periodic 2 mps, medium repeatability
#define BH1750_CMD_MEAS_PERI_2_L 0x222B // measurement: periodic 2 mps, low repeatability
#define BH1750_CMD_MEAS_PERI_4_H 0x2334 // measurement: periodic 4 mps, high repeatability
#define BH1750_CMD_MEAS_PERI_4_M 0x2322 // measurement: periodic 4 mps, medium repeatability
#define BH1750_CMD_MEAS_PERI_4_L 0x2329 // measurement: periodic 4 mps, low repeatability
#define BH1750_CMD_MEAS_PERI_10_H 0x2737 // measurement: periodic 10 mps, high repeatability
#define BH1750_CMD_MEAS_PERI_10_M 0x2721 // measurement: periodic 10 mps, medium repeatability
#define BH1750_CMD_MEAS_PERI_10_L 0x272A // measurement: periodic 10 mps, low repeatability
#define BH1750_CMD_MEAS_POLLING_H 0x2400 // measurement: polling, high repeatability
#define BH1750_CMD_MEAS_POLLING_M 0x240B // measurement: polling, medium repeatability
#define BH1750_CMD_MEAS_POLLING_L 0x2416 // measurement: polling, low repeatability
#define BH1750_CMD_MEAS_CLOCKSTR_H 0x2C06 // measurement: clock stretching, high repeatability
#define BH1750_CMD_MEAS_CLOCKSTR_M 0x2C0D // measurement: clock stretching, medium repeatability
#define BH1750_CMD_MEAS_CLOCKSTR_L 0x2C10 // measurement: clock stretching, low repeatability
#define BH1750_CMD_W_AL_LIM_HS 0x611D // write alert limits, high set
#define BH1750_CMD_W_AL_LIM_HC 0x6116 // write alert limits, high clear
#define BH1750_CMD_W_AL_LIM_LC 0x610B // write alert limits, low clear
#define BH1750_CMD_W_AL_LIM_LS 0x6100 // write alert limits, low set
#define BH1750_CMD_R_AL_LIM_LS 0xE102 // read alert limits, low set
#define BH1750_CMD_R_AL_LIM_LC 0xE109 // read alert limits, low clear
#define BH1750_CMD_R_AL_LIM_HS 0xE11F // read alert limits, high set
#define BH1750_CMD_R_AL_LIM_HC 0xE114 // read alert limits, high clear/***********************************************************
***********************variable define**********************
***********************************************************//***********************************************************
***********************function define**********************
***********************************************************/
/*** @brief delay (ms)** @param[in] tm: delay time** @return none*/
static void __bh1750_delay_ms(const uint32_t tm)
{tal_system_sleep(tm);
}// static void __bh1750_start_periodic_measurement(const uint8_t port, const uint8_t mode, const uint8_t freq)
// {
// switch (mode)
// {
// default:
// case 1:
// switch (freq)
// {
// default:
// case 1:
// /* one time */
// __bh1750_write_cmd(port, BH1750_CMD_ONE_H_RES_MODE);
// break;
// case 2:
// /* continue */
// __bh1750_write_cmd(port, BH1750_CMD_CON_H_RES_MODE);
// break;
// }
// break;// case 2:
// switch (freq)
// {
// default:
// case 1:
// /* one time */
// __bh1750_write_cmd(port, BH1750_CMD_ONE_H_RES_MODE2);
// break;
// case 2:
// /* continue */
// __bh1750_write_cmd(port, BH1750_CMD_CON_H_RES_MODE2);
// break;
// }
// break;// case 3:
// switch (freq)
// {
// default:
// case 1:
// /* one time */
// __bh1750_write_cmd(port, BH1750_CMD_ONE_L_RES_MODE);
// break;
// case 2:
// /* continue */
// __bh1750_write_cmd(port, BH1750_CMD_CON_L_RES_MODE);
// break;
// }
// break;
// }
// }// /**
// * @brief get CRC8 value for bh1750
// *
// * @param[in] data: data to be calculated
// * @param[in] len: data length
// *
// * @return CRC8 value
// */
// static uint8_t __bh1750_get_crc8(const uint8_t *data, uint16_t len)
// {
// uint8_t i;
// uint8_t crc = 0xFF;// while (len--) {
// crc ^= *data;// for (i = 8; i > 0; --i) {
// if (crc & 0x80) {
// crc = (crc << 1) ^ 0x31;
// } else {
// crc = (crc << 1);
// }
// }
// data++;
// }// return crc;
// }// /**
// * @brief check CRC8
// *
// * @param[in] data: data to be checked
// * @param[in] len: data length
// * @param[in] crc_val: crc value
// *
// * @return check result
// */
// static int __bh1750_check_crc8(const uint8_t *data, const uint16_t len, const uint8_t crc_val)
// {
// if (__bh1750_get_crc8(data, len) != crc_val) {
// return CRC_ERR;
// }
// return CRC_OK;
// }/*** @brief read data from bh1750** @param[in] dev: device resource* @param[in] len: data length* @param[out] data: data received from bh1750** @return none*/
static OPERATE_RET __bh1750_read_data(const uint8_t port, const uint16_t len, uint8_t *data)
{return tkl_i2c_master_receive(port, SR_I2C_ADDR_BH1750_A, data, len, FALSE);
}// /**
// * @brief write command to bh1750
// *
// * @param[in] dev: device resource
// * @param[in] cmd: control command
// *
// * @return none
// */
// static OPERATE_RET __bh1750_write_cmd2(const uint8_t port, const uint16_t cmd)
// {
// uint8_t buf[2];
// buf[0] = (uint8_t)(cmd >> 8);
// buf[1] = (uint8_t)(cmd & 0x00FF);// return tkl_i2c_master_send(port, SR_I2C_ADDR_BH1750_A, buf, 2, FALSE);
// }static OPERATE_RET __bh1750_write_cmd(const uint8_t port, const uint16_t cmd)
{uint8_t buf;buf = (uint8_t)(cmd & 0xFF);return tkl_i2c_master_send(port, SR_I2C_ADDR_BH1750_A, &buf, 1, FALSE);
}// static OPERATE_RET __bh1750_write_cmd(const uint8_t port, const uint16_t cmd)
// {
// uint8_t cmd_bytes[2];
// cmd_bytes[0] = (uint8_t)(cmd >> 8);
// cmd_bytes[1] = (uint8_t)(cmd & 0x00FF);// return tkl_i2c_master_send(port, SR_I2C_ADDR_BH1750_A, cmd_bytes, 2, FALSE);
// }// /**
// * @brief write command and data to bh1750
// *
// * @param[in] dev: device resource
// * @param[in] cmd: control command
// * @param[in] data: data to be written
// *
// * @return none
// */
// static void __bh1750_write_2bytes_data(const uint8_t port, const uint16_t cmd, const uint16_t data)
// {
// uint8_t buf[5];
// buf[0] = (uint8_t)(cmd >> 8);
// buf[1] = (uint8_t)(cmd & 0x00FF);
// buf[2] = (uint8_t)(data >> 8);
// buf[3] = (uint8_t)(data & 0x00FF);
// buf[4] = __bh1750_get_crc8(buf+2, 2);// return tkl_i2c_master_send(port, SR_I2C_ADDR_BH1750_A, buf, 5, FALSE);
// }/*** @brief read temperature and humidity from bh1750** @param[in] dev: device resource* @param[out] light: temperature value** @return OPRT_OK on success, others on error*/
OPERATE_RET bh1750_read_light(int port, uint16_t *light)
{uint8_t buf[6] = {0};OPERATE_RET ret = OPRT_OK;//PR_INFO("0. enable");// resetret = __bh1750_write_cmd(port, BH1750_CMD_POWER_ON);if(ret != OPRT_OK)return ret;__bh1750_delay_ms(50);//PR_INFO("1. reset");// resetret = __bh1750_write_cmd(port, BH1750_CMD_SOFT_RESET);if(ret != OPRT_OK)return ret;__bh1750_delay_ms(50);//PR_INFO("2. set mode");// set mode// __bh1750_write_cmd(port, dev->info[BH1750_RSRC_INDEX_MODE]);// __bh1750_start_periodic_measurement(port);ret = __bh1750_write_cmd(port, BH1750_CMD_ONE_H_RES_MODE);if(ret != OPRT_OK)return ret;// delay -- wait value return__bh1750_delay_ms(180);//PR_INFO("3. read");ret = __bh1750_read_data(port, 2, buf); if(ret != OPRT_OK)return ret;*light = ((uint16_t)buf[0] << 8) | buf[1];return ret;
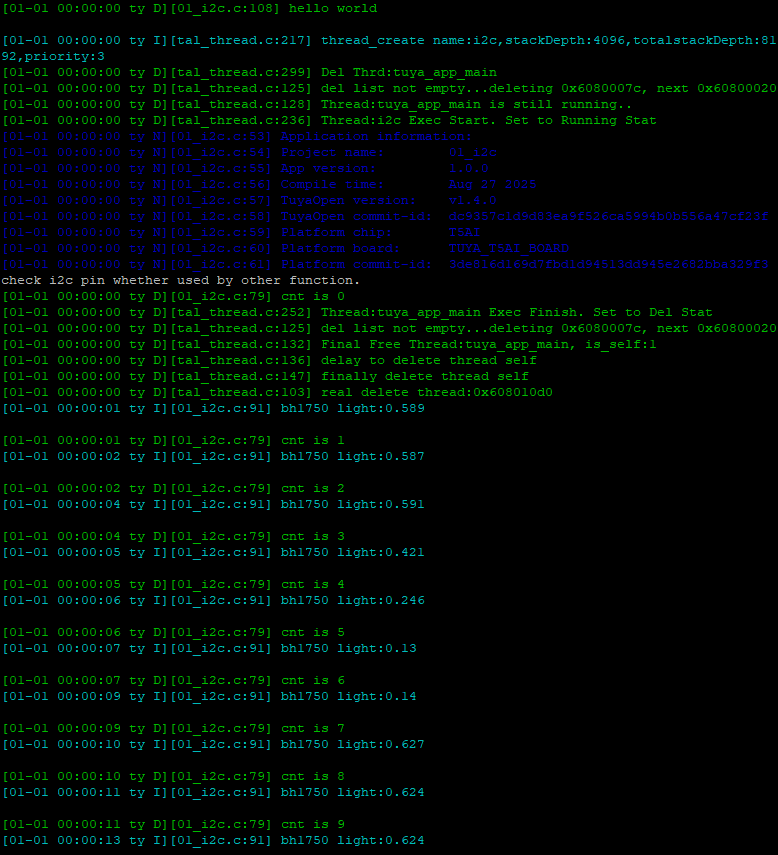
}结果
0.14是遮挡sensor数值偏低