ROS2 python功能包launch,config文件编译后找不到
创建一个python功能包,写完launch和config,编译后居然找不到launch文件,原因是在python功能包中,编译需要像c++编译时一样,将launch目录和config目录安装到install目录中。
找到功能包的setup.py文件可以观察到: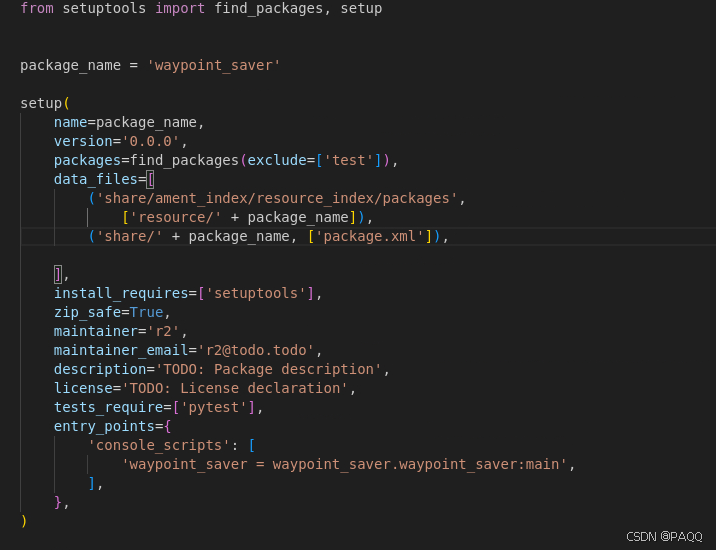
console_scripts为节点创建配置
但是luanch没有配置,所以可以在data_files中创建
('share/' + package_name + '/launch', ['launch/serial_comm.launch.py']),('share/' + package_name + '/config', ['config/serial_configs.yaml']),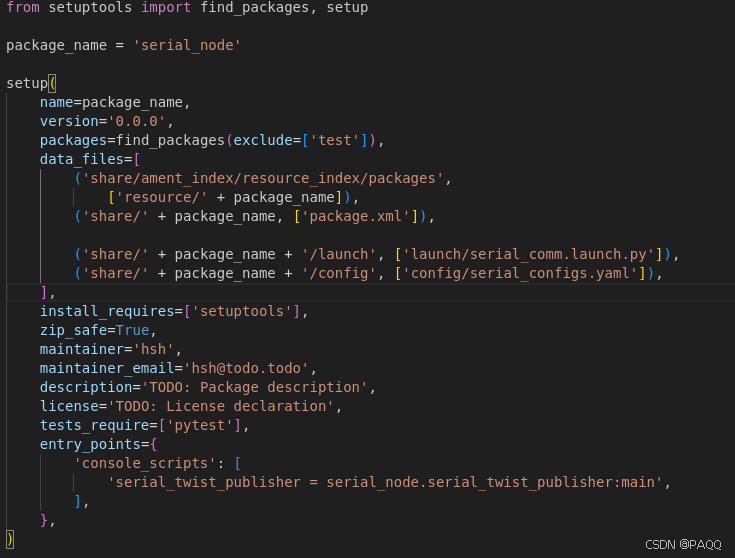
这样可以编译时候将launch和config安装到install目录,或者通过这种方法一次性将整个launch和config目录中的内容全部编译:
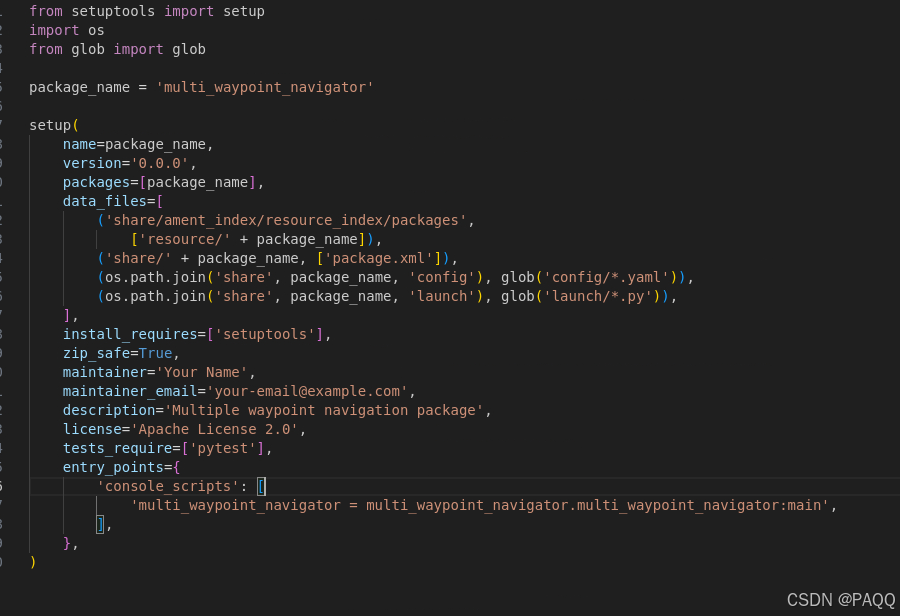
import os
from glob import glob...
data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),(os.path.join('share', package_name, 'config'), glob('config/*.yaml')),(os.path.join('share', package_name, 'launch'), glob('launch/*.py')),],
...