【Cocos】2D关节组件
物理系统包含了一系列用于链接两个刚体的关节组件。关节组件可以用来模拟真实世界物体间的交互,比如铰链,活塞、绳子、轮子、滑轮、机动车、链条等
关节组件
注意:
-
关节组件在 Builtin 2D 物理模块中是无效的。
-
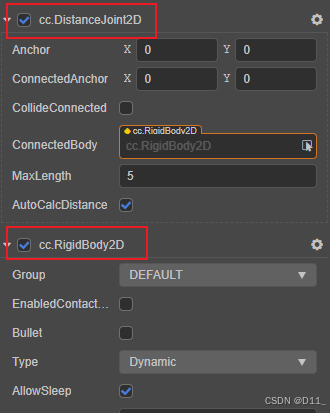
关节组件都需要搭配 刚体 才可以正确运行。如下图所示:
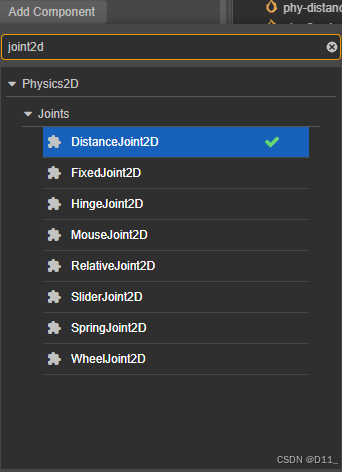
添加关节
在 属性检查器 上点击 添加组件 按钮并输入 2D 关节的组件名。
关节的共用属性
每个关节都需要链接两个刚体才能够发挥它的功能,我们把和关节挂在同一节点下的刚体视为关节的本端,把 ConnectedBody 视为另一端的刚体。
CollideConnected 属性用于确定关节两端的刚体是否需要继续遵循常规的碰撞规则。
如果你现在准备制作一个布娃娃,你可能会希望大腿和小腿能够部分重合,然后在膝盖处链接到一起,那么就需要设置 CollideConnected 属性为 false。如果你准备做一个升降机,希望升降机平台和地板能够碰撞,那么就需要设置 CollideConnected 属性为 true。
距离关节
在 属性检查器 上点击 添加组件 并输入 DistanceJoint2D 则可以添加距离关节。
会将关节两端的刚体约束在一个最大范围内。超出该范围时,刚体的运动会互相影响。
https://docs.cocos.com/creator/3.7/manual/assets/distance-joint.D2APznCI.gif![]() https://docs.cocos.com/creator/3.7/manual/assets/distance-joint.D2APznCI.gif低于该范围则不会互相影响。
https://docs.cocos.com/creator/3.7/manual/assets/distance-joint.D2APznCI.gif低于该范围则不会互相影响。
https://docs.cocos.com/creator/3.7/manual/assets/distance-joint-dis.DZVBcvfF.gif
属性
| 属性 | 说明 |
|---|---|
| MaxLength | 最大距离 |
| AutoCalcDistance | 是否自动计算关节连接的两个刚体间的距离 |
固定关节
在 属性检查器 上点击 添加组件 并输入 FixedJoint2D 则可以添加固定关节。根据两个物体的初始角度将两个物体上的两个点固定在一起。
https://docs.cocos.com/creator/3.7/manual/assets/fixed-joint.B3aBEYUc.gif
属性
| 属性 | 说明 |
|---|---|
| Frequency | 弹性系数 |
| DampingRatio | 阻尼,表示关节变形后,恢复到初始状态受到的阻力 |
铰链关节
在 属性检查器 上点击 添加组件 并输入 HingeJoint2D 则可以添加铰链关节。可以看做一个铰链或者钉,刚体会围绕一个共同点来旋转。
https://docs.cocos.com/creator/3.7/manual/assets/hinge-joint.BH9hIqhx.gif
属性
| 属性 | 说明 |
|---|---|
| EnableLimit | 是否开启关节的限制 |
| LowerAngle | 角度的最低限制 |
| UpperAngle | 角度的最高限制 |
| EnableMotor | 是否开启关节马达 |
| MaxMotorTorque | 可以施加到刚体的最大扭矩 |
| MotorSpeed | 期望的马达速度 |
启用马达速度后,关节连接的刚体会尝试逐渐加速到期望速度。
https://docs.cocos.com/creator/3.7/manual/assets/hinge-joint-motor.CopVufTq.gif
相对关节
在 属性检查器 上点击 添加组件 并输入 RelativeJoint2D 则可以添加相对关节。控制两个刚体间的相对运动。
https://docs.cocos.com/creator/3.7/manual/assets/relative-joint.Dxs9uOOC.gif
属性
| 属性 | 说明 |
|---|---|
| MaxForce | 可以应用于刚体的最大的力值 |
| MaxTorque | 可以应用于刚体的最大扭矩值 |
| CorrectionFactor | 位置矫正系数,范围为 [0, 1] |
| LinearOffset | 关节另一端的刚体相对于起始端刚体的位置偏移量 |
| AngularOffset | 关节另一端的刚体相对于起始端刚体的角度偏移量 |
| AutoCalcOffset | 自动计算关节连接的两个刚体间的 angularOffset 和 linearOffset |
滑动关节
在 属性检查器 上点击 添加组件 并输入 SliderJoint2D 则可以添加滑动关节。两个刚体位置间的角度是固定的,它们只能在一个指定的轴上滑动。如下图蓝色方块虽然受重力影响,但实际上由于关节的约束,只能沿设定的方向运动。
https://docs.cocos.com/creator/3.7/manual/assets/slider-joint.CKDQuOeE.gif
属性
| 属性 | 说明 |
|---|---|
| Angle | 滑动的方向 |
| AutoCalcAngle | 根据连接的两个刚体自动计算滑动方向 |
| EnableMotor | 是否开启关节马达 |
| MaxMotorForce | 可以施加到刚体的最大力 |
| MotorSpeed | 期望的马达速度 |
| EnableLimit | 是否开启关节的距离限制 |
| LowerLimit | 刚体能够移动的最小值 |
| UpperLimit | 刚体能够移动的最大值 |
弹簧关节
在 属性检查器 上点击 添加组件 并输入 SpringJoint2D 则可以添加弹簧关节。将关节两端物体像弹簧一样连接在一起。
https://docs.cocos.com/creator/3.7/manual/assets/spring-joint.CyQADNRD.gif
属性
| 属性 | 说明 |
|---|---|
| Frequency | 弹性系数 |
| DamingRatio | 阻尼,表示关节变形后,恢复到初始状态受到的阻力 |
| Distance | 关节两端的距离 |
| AutoCalcDistance | 自动计算关节连接的两个刚体间的距离 |
轮子关节
在 属性检查器 上点击 添加组件 并输入 WheelJoint2D 则可以添加轮子关节。用于模拟机动车车轮
https://docs.cocos.com/creator/3.7/manual/assets/wheel-joint.T_Nb7o03.gif
属性
| 属性 | 说明 |
|---|---|
| Angle | 轮子震动方向 |
| EnableMotor | 是否开启关节马达 |
| MaxMotorTorque | 可以施加到刚体的最大扭矩 |
| MotorSpeed | 期望的马达速度 |
| Frequency | 弹性系数 |
| DampingRatio | 阻尼,表示关节变形后,恢复到初始状态受到的阻力 |