torch.nn.Conv1d详解
目录
定义:
输出输入:
参数:
注意:
计算复杂度分析:
FLOPs对比dense层:
1. 线性层变换:nn.Linear(10 * E, E)
2. 两层卷积:nn.Conv1d(E, E, kernel_size=3)
参考:
定义:
class torch.nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)
在最简单的情况下,输入大小为 (N, C_in, L)、输出大小为 (N, C_out, L_out) 的该层的输出值可以精确描述为:

其中:
-
⋆是有效互相关运算符。 -
N是批量大小。 -
C表示通道数。 -
L是信号序列的长度。
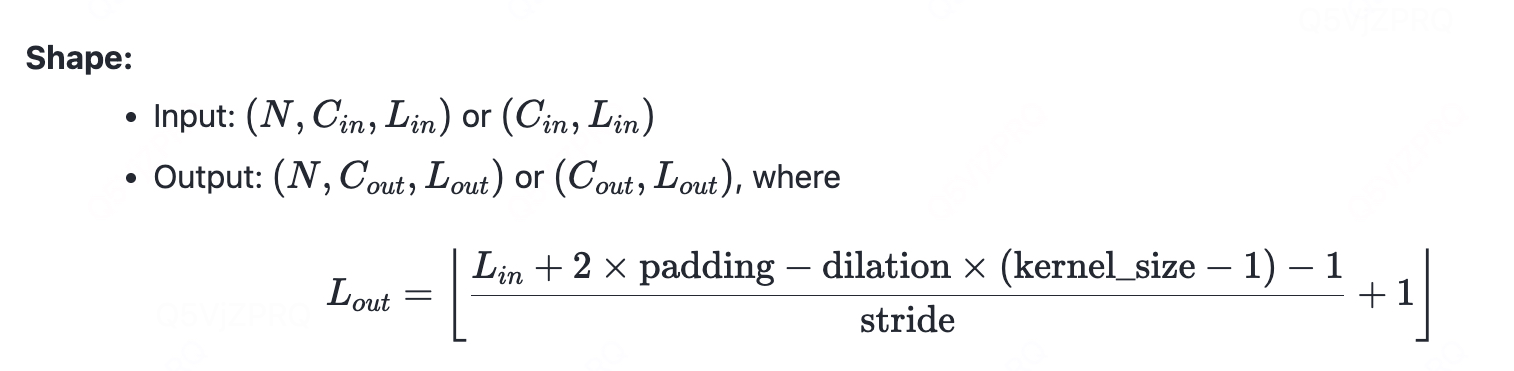
输出输入:
(N, C_out, L_out):
C_out: 卷机核个数,也就是输出通道数
L_out: 输出长度,计算公式:
参数:
-
stride: 控制互相关的步长,可以是一个数字或一个单元素元组。 -
padding: 控制应用于输入的填充量。它可以是字符串{'valid', 'same'},也可以是一个整数元组,表示在两侧应用的隐式填充量。-
padding='valid'等同于无填充。 -
padding='same'会填充输入,使得输出具有与输入相同的形状(长度)。然而,此模式仅支持步长 (stride) 为 1 的情况。 -
当
stride=1、dilation=1且想让L_out = length时,令-
padding = (kernel_size - 1) // 2 (kernel size应为奇数)
-
-
-
dilation: 控制卷积核点之间的间距;也称为空洞算法 (à trous algorithm)。描述起来较复杂,但此链接很好地展示了dilation的作用。 -
groups: 控制输入和输出之间的连接。in_channels和out_channels都必须能被groups整除。例如:-
当
groups=1时,所有输入被卷积到所有输出。 -
当
groups=2时,该操作等效于有两个并排的卷积层,每个层看到一半的输入通道并产生一半的输出通道,然后将两者连接起来。 -
当
groups = in_channels时,每个输入通道都与自己的一组滤波器(大小为out_channels / in_channels)进行卷积。(MobileNet 系列)
-
注意:
1. 输入维度只能是2维或3维,大于3维需要先reshape为3维向量
2. 输入需要将【batch, seq_len, embedding】 reshape为 【batch, embedding,seq_len 】,因为一维卷积是在最后维度上扫的
计算复杂度分析:
FLOPs ≈ 2 × L_out × C_in × K × C_out
-
L_out:输出特征图的长度(相当于二维卷积的H_out/W_out)(可以理解为序列长度?)
-
C_in:输入通道数
-
K:卷积核的宽度(一维卷积中只有宽度)
-
C_out:输出通道数
for c_out in range(C_out): # 每个输出通道
for c_in in range(C_in): # 每个输入通道
for k in range(K): # 卷积核宽度方向
value += input[c_in, i+k] * kernel[c_out, c_in, k]
总FLOPs = (输出位置数量) × (单点计算量)
= L_out × (2 × C_in × K × C_out)
= 2 × L_out × C_in × K × C_out
FLOPs对比dense层:
输入向量:【batch, seq, 10, embedding】
1. 经过nn.Linear(10 * self.embed_dim, self.embed_dim) 做变换
2. 经过2层卷积:nn.Conv1d(in_channels=self.embed_dim, out_channels=self.embed_dim, kernel_size=3)做变化
两者的时间复杂度对比:
1. 线性层变换:nn.Linear(10 * E, E)
步骤:
-
输入形状
[B, S, 10, E]→ 先合并最后两维:[B, S, 10*E] -
线性层计算:
Y = X · W^T + b-
权重矩阵
W形状:[E, 10*E] -
偏置
b形状:[E]
-
FLOPs 计算:
-
矩阵乘法
X · W^T:
每个样本的每个位置(共B * S个位置)需要计算:
输入向量 (1×10E) × 权重矩阵 (10E×E) → 输出向量 (1×E)
计算量 =2 × (10E) × E = 20E²(乘加各算一次) -
总乘法 FLOPs =
B * S * 20E² -
偏置加法(可忽略):
B * S * E(远小于矩阵乘法)
总 FLOPs ≈ 20 B S E²
2. 两层卷积:nn.Conv1d(E, E, kernel_size=3)
计算过程:
-
输入reshape:
[B, S, L, E]→[B*S, E, L]
(合并batch和seq维度,通道维在中间) -
第一层Conv1d:
-
输入:
[B*S, E, L] -
输出:
[B*S, E, L](假设padding=1保持长度) -
计算量:
2 × L × E × E × 3 = 6L E²
-
-
第二层Conv1d:同上,
6L E² -
总计算量:
(6L E² + 6L E²) × (B*S) = 12 B S L E²
总FLOPs:
代入 L=10:120 B S E²
总结:卷积计算量是线性层的6倍
参考:
Conv1d — PyTorch 2.8 documentation
pytorch之nn.Conv1d详解-CSDN博客
【Torch】nn.Conv1d、nn.Conv2d、nn.Conv3d算法详解-CSDN博客