【会议跟踪】ICRA 2021 Workshop:Visual-Inertial Navigation Systems
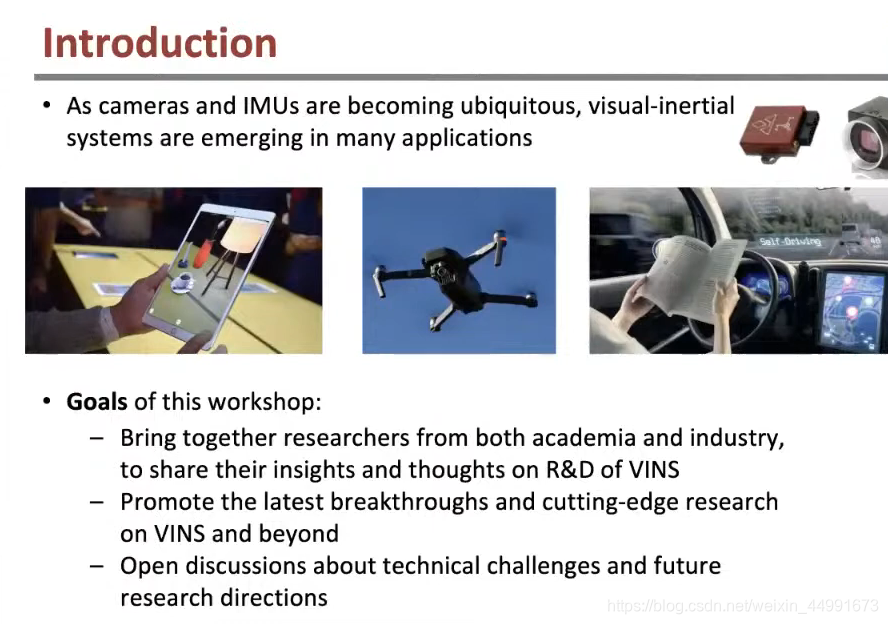
会议主旨
cameras IMU在AR/VR,无人机,自动驾驶的领域
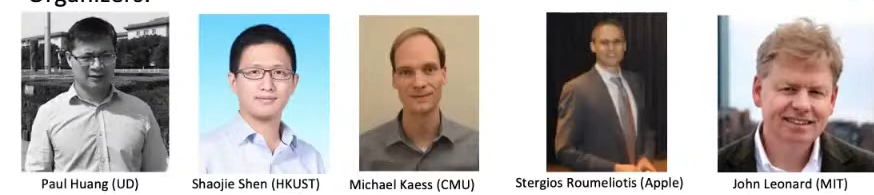
会议组织者
邀请嘉宾

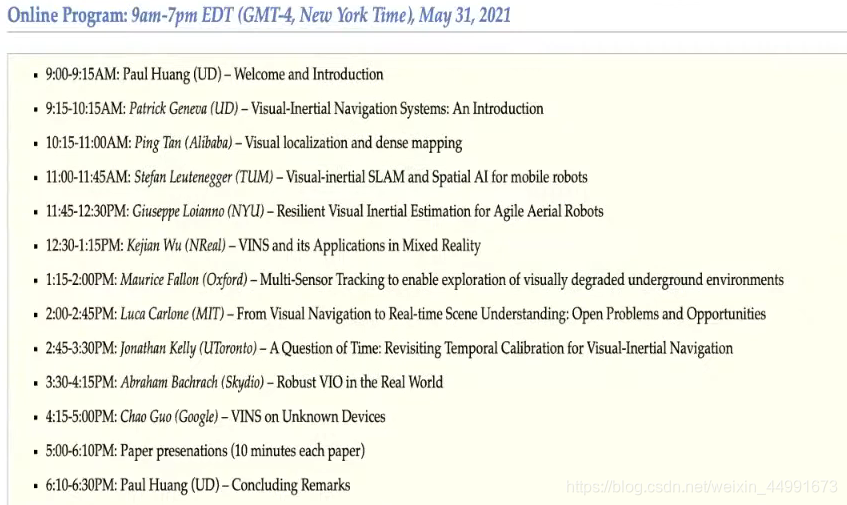
会议时间表
论文介绍
论文投稿
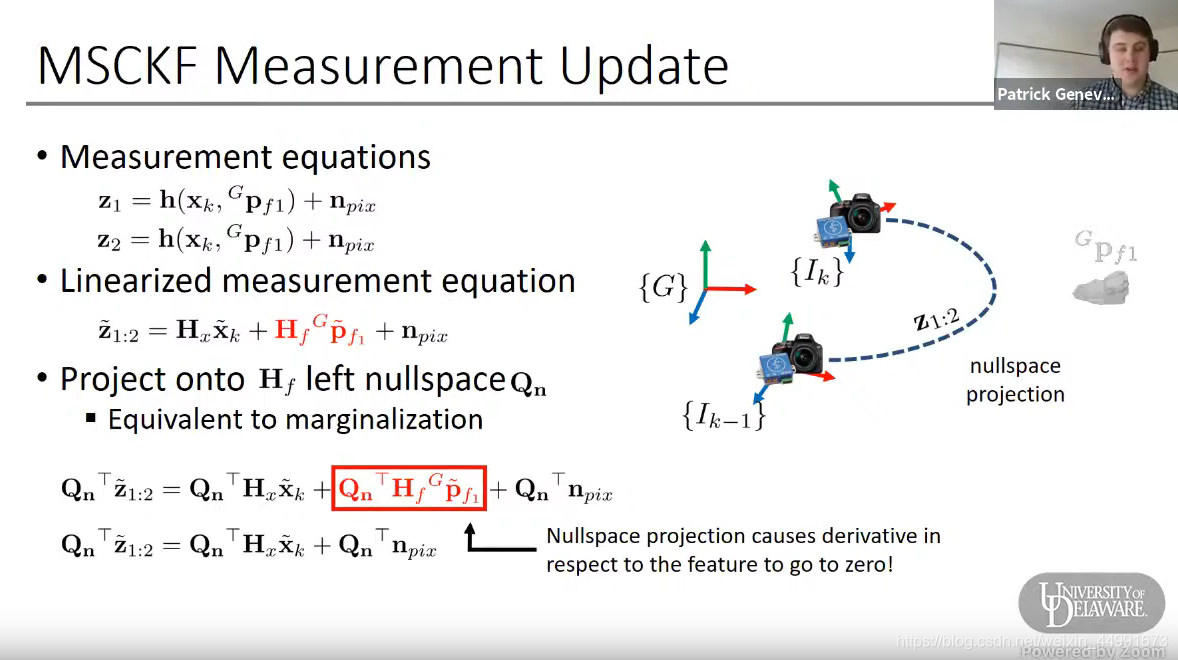
Visual-Inertial Navigation Systems:An Introduction[39.08]
Partrick Geneva,University of Delaware
Hello,everybody,today we are talking about
First,we will have some outline
Estimation Methodology
- muti-state constraint kalman filter(MSCKF)
- Batch least squares(BLS) with Pre-integration
- Incremental optimization(square-root information)