imx6ull-驱动开发篇26——Linux 中断实验
目录
设备树中断信息节点
获取中断号
实验程序编写
修改设备树文件
imx6uirq.c
测试imx6uirqApp.c
Makefile 文件
运行测试
设备树中断信息节点
如果使用设备树的话就需要在设备树中设置好中断属性信息, Linux 内核通过读取设备树中的中断 属性信息来配置中断。
对于中断控制器而言 ,设备树绑定信息参考文档路径如下:Documentation/devicetree/bindings/arm/gic.txt。
打开 imx6ull.dtsi 文件,其中的 intc 节点就是I.MX6ULL 的中断控制器节点。
intc节点 内容如下所示:
intc: interrupt-controller@00a01000 {/* 设备兼容性定义 - 指定为ARM Cortex-A7的通用中断控制器(GIC) */compatible = "arm,cortex-a7-gic";/* * 定义中断说明符的单元格数量:* 对于GIC,通常为3个单元格*/#interrupt-cells = <3>;/* 声明该设备为中断控制器 */interrupt-controller;/* * 寄存器地址映射:* - 第一个区域:GIC Distributor寄存器基地址(4KB空间)* - 第二个区域:GIC CPU Interface寄存器基地址(256B空间) */reg = <0x00a01000 0x1000>,<0x00a02000 0x100>;
};compatible 属性值为“arm,cortex-a7-gic”,在 Linux 内核源码中搜索“arm,cortex-a7- gic”即可找到 GIC 中断控制器驱动文件。
对于 ARM 处理的GIC 来说,中断控制器下设备的 cells大小一般为3:
- 第一个 cells:中断类型, 0 表示 SPI 中断, 1 表示 PPI 中断。
- 第二个 cells:中断号,对于 SPI 中断来说中断号的范围为 0~987,对于 PPI 中断来说中断号的范围为 0~15。
- 第三个 cells:标志, bit[3:0]表示中断触发类型,为 1 的时候表示上升沿触发,为 2 的时候表示下降沿触发,为 4 的时候表示高电平触发,为 8 的时候表示低电平触发。 bit[15:8]为 PPI 中断的 CPU 掩码。
对于 gpio 来说, gpio 节点也可以作为中断控制器,比如 imx6ull.dtsi 文件中的 gpio5 节点内容如下所示:
gpio5: gpio@020ac000 {compatible = "fsl,imx6ul-gpio", "fsl,imx35-gpio";/* 寄存器地址范围:GPIO5控制器占用的物理地址空间(16KB) */reg = <0x020ac000 0x4000>;/* * 中断定义(连接到GIC):* - 第一个中断:GIC SPI中断74,高电平触发* - 第二个中断:GIC SPI中断75,高电平触发* 通常对应GPIO组的两个中断线(如高低bank)*/interrupts = <GIC_SPI 74 IRQ_TYPE_LEVEL_HIGH>,<GIC_SPI 75 IRQ_TYPE_LEVEL_HIGH>;gpio-controller;/* * GPIO描述符的单元格数量:*/#gpio-cells = <2>;/* 声明该GPIO控制器可提供中断功能 */interrupt-controller;/* * 中断描述符的单元格数量:* - 对于GPIO中断通常为2:* - 第1个cell:GPIO编号* - 第2个cell:中断触发类型*/#interrupt-cells = <2>;
};可以看出, GPIO5 一共用了 2 个中断号,一个是 74,一个是 75。
其中 74 对应 GPIO5_IO00~GPIO5_IO15 这低 16 个 IO, 75 对应 GPIO5_IO16~GPIOI5_IO31 这高 16 位 IO。
简单总结一下与中断有关的设备树属性信息:
- #interrupt-cells,指定中断源的信息 cells 个数。
- interrupt-controller,表示当前节点为中断控制器。
- interrupts,指定中断号,触发方式等。
- interrupt-parent,指定父中断,也就是中断控制器
获取中断号
编写驱动的时候需要用到中断号,我们用到的中断号,中断信息已经写到了设备树里面,因此可以通过 irq_of_parse_and_map 函数从 interupts 属性中提取到对应的设备号。
irq_of_parse_and_map 函数原型如下:
unsigned int irq_of_parse_and_map(struct device_node *dev, int index)- dev: 设备节点。
- index:索引号, interrupts 属性可能包含多条中断信息,通过 index 指定要获取的信息。
- 返回值:中断号。
如果使用 GPIO 的话,可以使用 gpio_to_irq 函数来获取 gpio 对应的中断号。
gpio_to_irq 函数原型如下:
int gpio_to_irq(unsigned int gpio)- gpio: 要获取的 GPIO 编号。
- 返回值: GPIO 对应的中断号。
实验程序编写
本讲实验,我们驱动正点原子 I.MX6U-ALPHA 开发板上的 KEY0 按键,采用中断的方式,使用定时器来实现按键消抖,应用程序读取按键值并且通过终端打印出来。
修改设备树文件
按键 KEY0 使用中断模式,因此需要在“key”节点下添加中断相关属性。
添加完成以后的“key”节点内容如下所示:
key {/* 设备树节点基本属性 */#address-cells = <1>; // 子节点地址字段长度为1(无子节点时可省略)#size-cells = <1>; // 子节点大小字段长度为1(无子节点时可省略)/* 驱动兼容性标识 */compatible = "atkalpha-key"; // 匹配驱动程序的字符串/* 引脚控制配置 */pinctrl-names = "default"; // 引脚状态名称(默认状态)pinctrl-0 = <&pinctrl_key>; // 引用pinctrl节点配置具体引脚/* GPIO按键配置 */key-gpio = <&gpio1 18 GPIO_ACTIVE_LOW>; // 使用GPIO1_18,低电平有效(按键按下时拉低)/* 中断配置 */interrupt-parent = <&gpio1>; // 中断控制器为gpio1interrupts = <18 IRQ_TYPE_EDGE_BOTH>; // GPIO1_18,双边沿触发(按下和释放都触发)/* 设备状态 */status = "okay"; // 启用该设备
};设置 interrupt-parent 属性值为“gpio1”,因为 KEY0 所使用的 GPIO 为GPIO1_IO18,也就是设置 KEY0 的 GPIO 中断控制器为 gpio1。
设置 interrupts 属性,也就是设置中断源,第一个 cells 的 18 表示 GPIO1 组的 18号 IO。 IRQ_TYPE_EDGE_BOTH 表示上升沿和下降沿同时有效,相当于 KEY0 按下和释放都会触发中断。
IRQ_TYPE_EDGE_BOTH 定义在文件 include/linux/irq.h 中,定义如下:
enum {/* 无明确触发类型(通常需要驱动程序特别处理) */IRQ_TYPE_NONE = 0x00000000,/* 边沿触发类型 */IRQ_TYPE_EDGE_RISING = 0x00000001, // 上升沿触发IRQ_TYPE_EDGE_FALLING = 0x00000002, // 下降沿触发IRQ_TYPE_EDGE_BOTH = (IRQ_TYPE_EDGE_FALLING | IRQ_TYPE_EDGE_RISING), // 双边沿触发/* 电平触发类型 */ IRQ_TYPE_LEVEL_HIGH = 0x00000004, // 高电平触发IRQ_TYPE_LEVEL_LOW = 0x00000008, // 低电平触发IRQ_TYPE_LEVEL_MASK = (IRQ_TYPE_LEVEL_LOW | IRQ_TYPE_LEVEL_HIGH), // 电平触发掩码......
};设备树编写完成以后使用“ make dtbs”命令重新编译设备树,然后使用新编译出来的imx6ull-alientek-emmc.dtb 文件启动 Linux 系统。
imx6uirq.c
然后开始按键中断驱动程序imx6uirq.c的编写,代码如下:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/of_irq.h>
#include <linux/irq.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define IMX6UIRQ_CNT 1 /* 设备号个数 */
#define IMX6UIRQ_NAME "imx6uirq" /* 名字 */
#define KEY0VALUE 0X01 /* KEY0按键值 */
#define INVAKEY 0XFF /* 无效的按键值 */
#define KEY_NUM 1 /* 按键数量 *//* 中断IO描述结构体 */
struct irq_keydesc {int gpio; /* gpio */int irqnum; /* 中断号 */unsigned char value; /* 按键对应的键值 */char name[10]; /* 名字 */irqreturn_t (*handler)(int, void *); /* 中断服务函数 */
};/* imx6uirq设备结构体 */
struct imx6uirq_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */atomic_t keyvalue; /* 有效的按键键值 */atomic_t releasekey; /* 标记是否完成一次完成的按键,包括按下和释放 */struct timer_list timer;/* 定义一个定时器*/struct irq_keydesc irqkeydesc[KEY_NUM]; /* 按键描述数组 */unsigned char curkeynum; /* 当前的按键号 */
};struct imx6uirq_dev imx6uirq; /* irq设备 *//* @description : 中断服务函数,开启定时器,延时10ms,* 定时器用于按键消抖。* @param - irq : 中断号 * @param - dev_id : 设备结构。* @return : 中断执行结果*/
static irqreturn_t key0_handler(int irq, void *dev_id)
{struct imx6uirq_dev *dev = (struct imx6uirq_dev *)dev_id;dev->curkeynum = 0;dev->timer.data = (volatile long)dev_id;mod_timer(&dev->timer, jiffies + msecs_to_jiffies(10)); /* 10ms定时 */return IRQ_RETVAL(IRQ_HANDLED);
}/* @description : 定时器服务函数,用于按键消抖,定时器到了以后* 再次读取按键值,如果按键还是处于按下状态就表示按键有效。* @param - arg : 设备结构变量* @return : 无*/
void timer_function(unsigned long arg)
{unsigned char value;unsigned char num;struct irq_keydesc *keydesc;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)arg;num = dev->curkeynum;keydesc = &dev->irqkeydesc[num];value = gpio_get_value(keydesc->gpio); /* 读取IO值 */if(value == 0){ /* 按下按键 */atomic_set(&dev->keyvalue, keydesc->value);}else{ /* 按键松开 */atomic_set(&dev->keyvalue, 0x80 | keydesc->value);atomic_set(&dev->releasekey, 1); /* 标记松开按键,即完成一次完整的按键过程 */ }
}/** @description : 按键IO初始化* @param : 无* @return : 无*/
static int keyio_init(void)
{unsigned char i = 0;int ret = 0;imx6uirq.nd = of_find_node_by_path("/key");if (imx6uirq.nd== NULL){printk("key node not find!\r\n");return -EINVAL;} /* 提取GPIO */for (i = 0; i < KEY_NUM; i++) {imx6uirq.irqkeydesc[i].gpio = of_get_named_gpio(imx6uirq.nd ,"key-gpio", i);if (imx6uirq.irqkeydesc[i].gpio < 0) {printk("can't get key%d\r\n", i);}}/* 初始化key所使用的IO,并且设置成中断模式 */for (i = 0; i < KEY_NUM; i++) {memset(imx6uirq.irqkeydesc[i].name, 0, sizeof(imx6uirq.irqkeydesc[i].name)); /* 缓冲区清零 */sprintf(imx6uirq.irqkeydesc[i].name, "KEY%d", i); /* 组合名字 */gpio_request(imx6uirq.irqkeydesc[i].gpio, imx6uirq.irqkeydesc[i].name);gpio_direction_input(imx6uirq.irqkeydesc[i].gpio); imx6uirq.irqkeydesc[i].irqnum = irq_of_parse_and_map(imx6uirq.nd, i);
#if 0imx6uirq.irqkeydesc[i].irqnum = gpio_to_irq(imx6uirq.irqkeydesc[i].gpio);
#endifprintk("key%d:gpio=%d, irqnum=%d\r\n",i, imx6uirq.irqkeydesc[i].gpio, imx6uirq.irqkeydesc[i].irqnum);}/* 申请中断 */imx6uirq.irqkeydesc[0].handler = key0_handler;imx6uirq.irqkeydesc[0].value = KEY0VALUE;for (i = 0; i < KEY_NUM; i++) {ret = request_irq(imx6uirq.irqkeydesc[i].irqnum, imx6uirq.irqkeydesc[i].handler, IRQF_TRIGGER_FALLING|IRQF_TRIGGER_RISING, imx6uirq.irqkeydesc[i].name, &imx6uirq);if(ret < 0){printk("irq %d request failed!\r\n", imx6uirq.irqkeydesc[i].irqnum);return -EFAULT;}}/* 创建定时器 */init_timer(&imx6uirq.timer);imx6uirq.timer.function = timer_function;return 0;
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int imx6uirq_open(struct inode *inode, struct file *filp)
{filp->private_data = &imx6uirq; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t imx6uirq_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int ret = 0;unsigned char keyvalue = 0;unsigned char releasekey = 0;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)filp->private_data;keyvalue = atomic_read(&dev->keyvalue);releasekey = atomic_read(&dev->releasekey);if (releasekey) { /* 有按键按下 */ if (keyvalue & 0x80) {keyvalue &= ~0x80;ret = copy_to_user(buf, &keyvalue, sizeof(keyvalue));} else {goto data_error;}atomic_set(&dev->releasekey, 0);/* 按下标志清零 */} else {goto data_error;}return 0;data_error:return -EINVAL;
}/* 设备操作函数 */
static struct file_operations imx6uirq_fops = {.owner = THIS_MODULE,.open = imx6uirq_open,.read = imx6uirq_read,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init imx6uirq_init(void)
{/* 1、构建设备号 */if (imx6uirq.major) {imx6uirq.devid = MKDEV(imx6uirq.major, 0);register_chrdev_region(imx6uirq.devid, IMX6UIRQ_CNT, IMX6UIRQ_NAME);} else {alloc_chrdev_region(&imx6uirq.devid, 0, IMX6UIRQ_CNT, IMX6UIRQ_NAME);imx6uirq.major = MAJOR(imx6uirq.devid);imx6uirq.minor = MINOR(imx6uirq.devid);}/* 2、注册字符设备 */cdev_init(&imx6uirq.cdev, &imx6uirq_fops);cdev_add(&imx6uirq.cdev, imx6uirq.devid, IMX6UIRQ_CNT);/* 3、创建类 */imx6uirq.class = class_create(THIS_MODULE, IMX6UIRQ_NAME);if (IS_ERR(imx6uirq.class)) {return PTR_ERR(imx6uirq.class);}/* 4、创建设备 */imx6uirq.device = device_create(imx6uirq.class, NULL, imx6uirq.devid, NULL, IMX6UIRQ_NAME);if (IS_ERR(imx6uirq.device)) {return PTR_ERR(imx6uirq.device);}/* 5、初始化按键 */atomic_set(&imx6uirq.keyvalue, INVAKEY);atomic_set(&imx6uirq.releasekey, 0);keyio_init();return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit imx6uirq_exit(void)
{unsigned int i = 0;/* 删除定时器 */del_timer_sync(&imx6uirq.timer); /* 删除定时器 *//* 释放中断 */for (i = 0; i < KEY_NUM; i++) {free_irq(imx6uirq.irqkeydesc[i].irqnum, &imx6uirq);gpio_free(imx6uirq.irqkeydesc[i].gpio);}cdev_del(&imx6uirq.cdev);unregister_chrdev_region(imx6uirq.devid, IMX6UIRQ_CNT);device_destroy(imx6uirq.class, imx6uirq.devid);class_destroy(imx6uirq.class);
}module_init(imx6uirq_init);
module_exit(imx6uirq_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("huax");
代码关键点如下:
结构体 irq_keydesc 为按键的中断描述结构体,使用 irq_keydesc 结构体即可描述一个按键中断。
- gpio 为按键 GPIO 编号,
- irqnum为按键 IO 对应的中断号,
- value 为按键对应的键值,
- name 为按键名字,
- handler 为按键中断服务函数。
/* 中断IO描述结构体 */
struct irq_keydesc {int gpio; /* gpio */int irqnum; /* 中断号 */unsigned char value; /* 按键对应的键值 */char name[10]; /* 名字 */irqreturn_t (*handler)(int, void *); /* 中断服务函数 */
};结构体 imx6uirq_dev中,
- keyvalue 保存按键值,
- releasekey 表示按键是否被释放,如果按键被释放表示发生了一次完整的按键过程。
- timer 为按键消抖定时器,
- 数组 irqkeydesc 为按键信息数组,数组元素个数就是开发板上的按键个数-1.
- curkeynum 表示当前按键。
/* imx6uirq设备结构体 */
struct imx6uirq_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */atomic_t keyvalue; /* 有效的按键键值 */atomic_t releasekey; /* 标记是否完成一次完成的按键,包括按下和释放 */struct timer_list timer;/* 定义一个定时器*/struct irq_keydesc irqkeydesc[KEY_NUM]; /* 按键描述数组 */unsigned char curkeynum; /* 当前的按键号 */
};key0_handler 函数,按键 KEY0 中断处理函数,参数 dev_id 为设备结构体,也就是 imx6uirq。
设置 curkeynum=0,表示当前按键为 KEY0,使用 mod_timer函数启动定时器,定时器周期为 10ms。
static irqreturn_t key0_handler(int irq, void *dev_id)
{struct imx6uirq_dev *dev = (struct imx6uirq_dev *)dev_id;dev->curkeynum = 0;dev->timer.data = (volatile long)dev_id;mod_timer(&dev->timer, jiffies + msecs_to_jiffies(10)); /* 10ms定时 */return IRQ_RETVAL(IRQ_HANDLED);
}timer_function 函数,定时器定时处理函数,参数 arg 是设备结构体,也就是imx6uirq,在此函数中读取按键值。
void timer_function(unsigned long arg)
{unsigned char value;unsigned char num;struct irq_keydesc *keydesc;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)arg;num = dev->curkeynum;keydesc = &dev->irqkeydesc[num];value = gpio_get_value(keydesc->gpio); /* 读取IO值 */if(value == 0){ /* 按下按键 */atomic_set(&dev->keyvalue, keydesc->value);}else{ /* 按键松开 */atomic_set(&dev->keyvalue, 0x80 | keydesc->value);atomic_set(&dev->releasekey, 1); /* 标记松开按键,即完成一次完整的按键过程 */ }
}keyio_init 函数,按键 IO 初始化函数,主要功能是提取IO、初始化key所使用的IO,并且设置成中断模式、申请中断、创建定时器。
static int keyio_init(void)
{unsigned char i = 0;int ret = 0;imx6uirq.nd = of_find_node_by_path("/key");if (imx6uirq.nd== NULL){printk("key node not find!\r\n");return -EINVAL;} /* 提取GPIO */for (i = 0; i < KEY_NUM; i++) {imx6uirq.irqkeydesc[i].gpio = of_get_named_gpio(imx6uirq.nd ,"key-gpio", i);if (imx6uirq.irqkeydesc[i].gpio < 0) {printk("can't get key%d\r\n", i);}}/* 初始化key所使用的IO,并且设置成中断模式 */for (i = 0; i < KEY_NUM; i++) {memset(imx6uirq.irqkeydesc[i].name, 0, sizeof(imx6uirq.irqkeydesc[i].name)); /* 缓冲区清零 */sprintf(imx6uirq.irqkeydesc[i].name, "KEY%d", i); /* 组合名字 */gpio_request(imx6uirq.irqkeydesc[i].gpio, imx6uirq.irqkeydesc[i].name);gpio_direction_input(imx6uirq.irqkeydesc[i].gpio); imx6uirq.irqkeydesc[i].irqnum = irq_of_parse_and_map(imx6uirq.nd, i);
#if 0imx6uirq.irqkeydesc[i].irqnum = gpio_to_irq(imx6uirq.irqkeydesc[i].gpio);
#endifprintk("key%d:gpio=%d, irqnum=%d\r\n",i, imx6uirq.irqkeydesc[i].gpio, imx6uirq.irqkeydesc[i].irqnum);}/* 申请中断 */imx6uirq.irqkeydesc[0].handler = key0_handler;imx6uirq.irqkeydesc[0].value = KEY0VALUE;for (i = 0; i < KEY_NUM; i++) {ret = request_irq(imx6uirq.irqkeydesc[i].irqnum, imx6uirq.irqkeydesc[i].handler, IRQF_TRIGGER_FALLING|IRQF_TRIGGER_RISING, imx6uirq.irqkeydesc[i].name, &imx6uirq);if(ret < 0){printk("irq %d request failed!\r\n", imx6uirq.irqkeydesc[i].irqnum);return -EFAULT;}}/* 创建定时器 */init_timer(&imx6uirq.timer);imx6uirq.timer.function = timer_function;return 0;
}imx6uirq_read 函数,对应应用程序的 read 函数。此函数向应用程序返回按键值。
static ssize_t imx6uirq_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int ret = 0;unsigned char keyvalue = 0;unsigned char releasekey = 0;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)filp->private_data;keyvalue = atomic_read(&dev->keyvalue);releasekey = atomic_read(&dev->releasekey);if (releasekey) { /* 有按键按下 */ if (keyvalue & 0x80) {keyvalue &= ~0x80;ret = copy_to_user(buf, &keyvalue, sizeof(keyvalue));} else {goto data_error;}atomic_set(&dev->releasekey, 0);/* 按下标志清零 */} else {goto data_error;}return 0;data_error:return -EINVAL;
}测试imx6uirqApp.c
测试 APP 要实现的内容是,通过不断的读取/dev/imx6uirq 文件来获取按键值,当按键按下以后就会将获取到的按键值输出在终端上。
代码如下:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include "linux/ioctl.h"/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd;int ret = 0;char *filename;unsigned char data;if (argc != 2) {printf("Error Usage!\r\n");return -1;}filename = argv[1];fd = open(filename, O_RDWR);if (fd < 0) {printf("Can't open file %s\r\n", filename);return -1;}while (1) {ret = read(fd, &data, sizeof(data));if (ret < 0) { /* 数据读取错误或者无效 */} else { /* 数据读取正确 */if (data) /* 读取到数据 */printf("key value = %#X\r\n", data);}}close(fd);return ret;
}
while 循环里,不断地读取按键值,如果读取到有效的按键值就将其输出到终端上。
Makefile 文件
makefile文件只需要修改 obj-m 变量的值,改为imx6uirq.o。
内容如下:
KERNELDIR := /home/huax/linux/linux_test/linux-imx-rel_imx_4.1.15_2.1.0_gaCURRENT_PATH := $(shell pwd)
obj-m := imx6uirq.obuild: kernel_modules
kernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean运行测试
编译代码:
make -j32 //编译makefile文件arm-linux-gnueabihf-gcc imx6uirqApp.c -o imx6uirqApp //编译测试程序编译成功以后,就会生成一个名为“imx6uirq.ko”的驱动模块文件,和imx6uirqApp 这个应用程序。
将编译出来的 imx6uirq.ko 和 imx6uirqApp 这 两 个 文 件 拷 贝 到rootfs/lib/modules/4.1.15 目录中,重启开发板。
进入到目录 lib/modules/4.1.15 中,输入如下命令加载 imx6uirq.ko 驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe imx6uirq.ko //加载驱动驱动加载成功以后可以通过查看/proc/interrupts 文件来检查一下对应的中断有没有被注册上,输入如下命令:
cat /proc/interrupts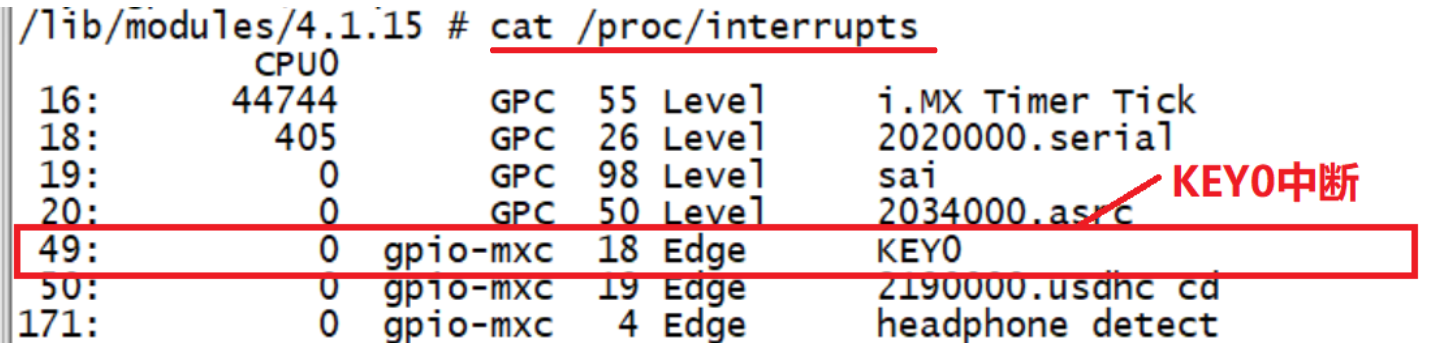
可以看出 imx6uirq.c 驱动文件里面的 KEY0 中断已经存在了,触发方式为跳边沿(Edge),中断号为 49。
使用如下命令来测试中断:
./imx6uirqApp /dev/imx6uirq按下开发板上的 KEY0 键,终端就会输出按键值,如图:
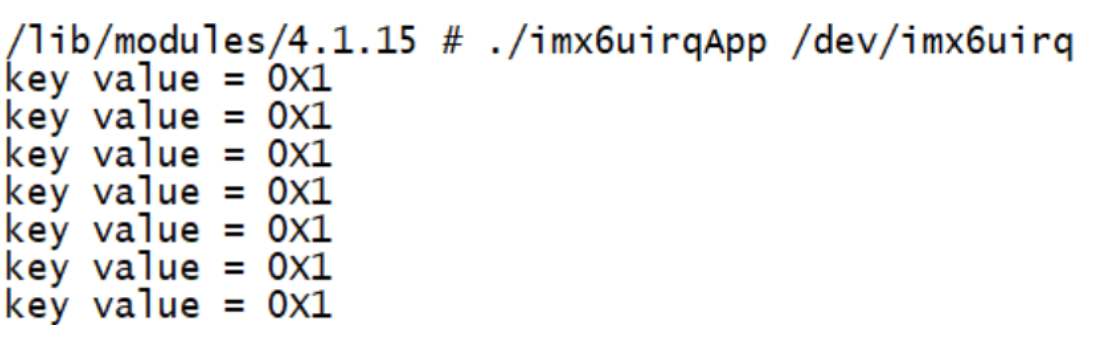
可以看出,按键值获取成功,并且不会有按键抖动导致的误判发生,说明按键消抖工作正常。
卸载驱动的话输入如下命令即可:
rmmod imx6uirq.ko