【unity实战】用unity实现一个简易的战斗飞机控制器
文章目录
- 前言
- 实战
- 1、素材
- 2、给飞机添加刚体和碰撞器
- 3、添加虚拟相机控制
- 4、获取输入
- 5、推进力
- 6、添加升力
- 7、添加地面检测
- 8、转向和机身倾斜效果
- 9、 螺旋桨旋转效果
- 10、 UI显示速度和高度信息
- 11、 根据速度动态播放音效大小
- 最终代码
- 专栏推荐
- 完结
前言
本文介绍了Unity飞机模拟控制系统的实现方法,通过刚体物理、射线检测和欧拉角变换等技术,实现了包括起飞加速、俯仰滚转、高度速度显示等完整的飞行模拟功能,所有参数均可通过Inspector面板调节,最终呈现流畅的飞行体验效果。
实战
1、素材
https://assetstore.unity.com/packages/3d/vehicles/air/rusty-plane-161892
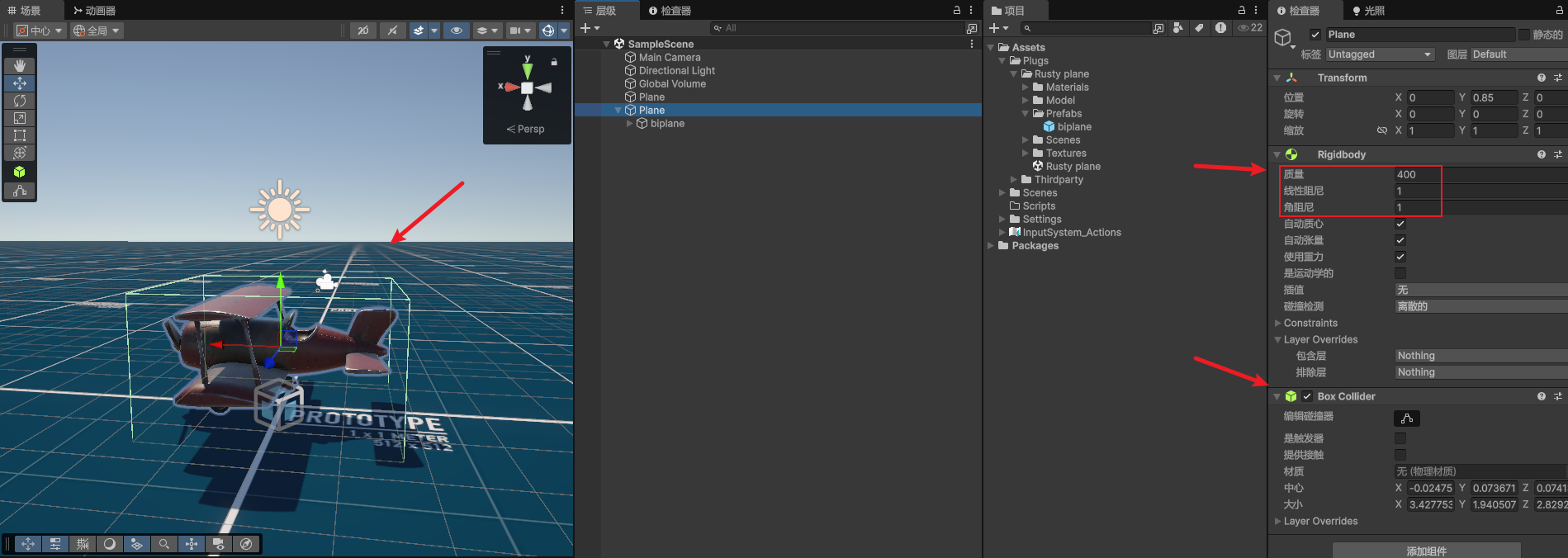
2、给飞机添加刚体和碰撞器
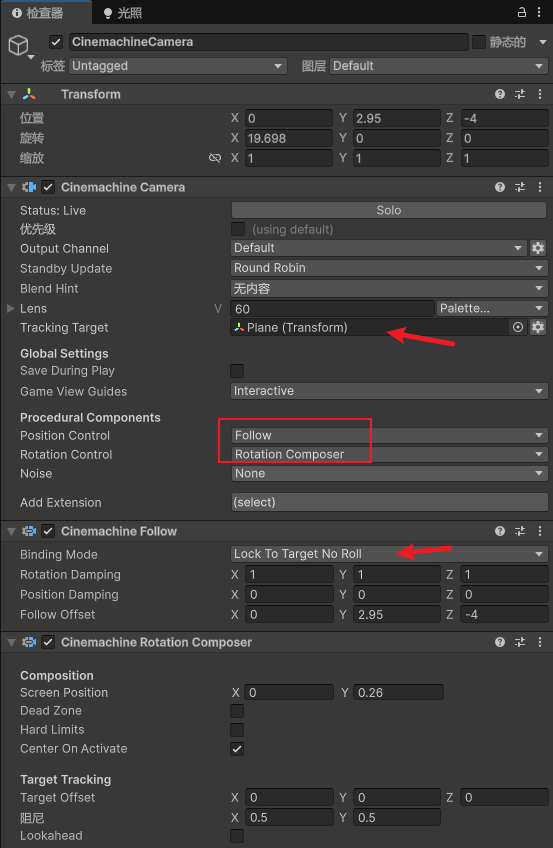
3、添加虚拟相机控制
具体可以参考:【unity知识】最新的虚拟相机Cinemachine3简单使用介绍
4、获取输入
#region 处理玩家输入控制
private Vector2 _movement; // 输入控制向量
/// <summary>
/// 处理玩家输入控制
/// </summary>
private void HandleInputs()
{// 获取摇杆/键盘输入_movement.x = Input.GetAxis("Horizontal"); // 偏航控制_movement.y = Input.GetAxis("Vertical"); // 俯仰控制
}
#endregion
5、推进力
#region 推进力
[Header("推进力")]
[Tooltip("油门调节速率")]
public float throttleIncrement = 0.1f;[Tooltip("最大推进力")]
public float maxThrust = 200f;
private float throttle; // 当前使用的最大引擎推力百分比void ThrottleControl(){// 油门控制(空格加速/Ctrl减速)if (Input.GetKey(KeyCode.Space)) throttle += throttleIncrement;else if (Input.GetKey(KeyCode.LeftControl)) throttle -= throttleIncrement;// 限制油门范围并标准化throttle = Mathf.Clamp(throttle, 0f, 100f);
}void PropulsiveForce()
{// 推进力(与油门成正比)rb.AddForce(transform.forward * maxThrust * throttle);
}
#endregion
效果
6、添加升力
#region 升力
[Header("升力系数")]
public float lift = 135f;
void LiftForce()
{// 动态升力(速度越快升力越大)rb.AddForce(transform.up * rb.linearVelocity.magnitude * lift);
}
#endregion

7、添加地面检测
#region 环境检测系统
[Header("地面检测设置")]
public LayerMask groundLayer; // 地面碰撞层
public float groundCheckDistance = 5f; // 检测距离[Tooltip("是否处于地面状态")]
public bool isGround; // 地面状态标识private RaycastHit _hit; // 射线检测结果/// <summary>
/// 地面接触检测(向下发射射线)
/// </summary>
void HandleGroundCheck()
{isGround = Physics.Raycast(transform.position + new Vector3(0,1,1),transform.TransformDirection(Vector3.down),out _hit,groundCheckDistance,groundLayer);
}// 编辑器可视化辅助
void OnDrawGizmosSelected()
{Gizmos.color = Color.red;Gizmos.DrawLine(transform.position + new Vector3(0,1,1),transform.position + new Vector3(0,1,1) + transform.TransformDirection(Vector3.down) * groundCheckDistance);
}
#endregion
8、转向和机身倾斜效果
#region 转向
[Header("转向参数")][Tooltip("飞行操控灵敏度系数")]
public float responsiveness = 500f;/// <summary>
/// 偏航控制(绕Y轴旋转)
/// </summary>
void Turn()
{if (isGround) return;rb.AddTorque(transform.up * _movement.x * responsiveness);
}
#endregion#region 飞行控制系统
[Header("飞行姿态参数")]
public float maxPitchAngle = 20f; // 最大俯仰角度
public float maxRollAngle = 30f; // 最大滚转角度private Vector2 _currentTiltAngle; // 当前姿态角度/// <summary>
/// 机身倾斜效果(根据输入平滑过渡)
/// </summary>
void Tilting()
{if (isGround) return;// 俯仰角度插值_currentTiltAngle.y = Mathf.Lerp(_currentTiltAngle.y,_movement.y * maxPitchAngle,Time.deltaTime * responsiveness);// 滚转角度插值_currentTiltAngle.x = Mathf.Lerp(_currentTiltAngle.x,_movement.x * maxRollAngle,Time.deltaTime * responsiveness);// 应用欧拉角旋转(保持当前偏航角)transform.localRotation = Quaternion.Euler(_currentTiltAngle.y,transform.localEulerAngles.y,-_currentTiltAngle.x);
}
#endregion
效果
9、 螺旋桨旋转效果
#region 螺旋桨旋转效果
[Header("螺旋桨")]
[SerializeField]
private Transform propella;
void PropellerRotation()
{// 螺旋桨旋转效果(转速与油门正相关)propella.Rotate(Vector3.right * throttle * 1000f * Time.deltaTime);
}
#endregion
10、 UI显示速度和高度信息
#region UI显示
[Header("UI显示")]
[SerializeField]
private Text hud;/// <summary>
/// 更新飞行数据HUD显示
/// </summary>
private void UpdateHUD()
{hud.text = $"油门: {throttle * 100:F0}%\n" +$"空速: {rb.linearVelocity.magnitude * 3.6f:F0} km/h\n" +$"高度: {transform.position.y:F0} m";
}
#endregion
效果
11、 根据速度动态播放音效大小
#region 音效
void PlaySound()
{audioSource.volume = throttle * 0.01f;
}
#endregion
最终代码
using UnityEngine;
using UnityEngine.UI;public class PlaneController : MonoBehaviour
{private Rigidbody rb;private AudioSource audioSource;private void Start(){rb = GetComponent<Rigidbody>();audioSource = GetComponent<AudioSource>();}private void Update(){HandleGroundCheck();ThrottleControl();HandleInputs();Tilting();PropellerRotation();UpdateHUD();PlaySound();}private void FixedUpdate(){PropulsiveForce();Turn();LiftForce();}#region 处理玩家输入控制private Vector2 _movement; // 输入控制向量/// <summary>/// 处理玩家输入控制/// </summary>private void HandleInputs(){// 获取摇杆/键盘输入_movement.x = Input.GetAxis("Horizontal"); // 偏航控制_movement.y = Input.GetAxis("Vertical"); // 俯仰控制}#endregion#region 推进力[Header("推进力")][Tooltip("油门调节速率")]public float throttleIncrement = 0.1f;[Tooltip("最大推进力")]public float maxThrust = 200f;private float throttle; // 当前使用的最大引擎推力百分比void ThrottleControl(){// 油门控制(空格加速/Ctrl减速)if (Input.GetKey(KeyCode.Space)) throttle += throttleIncrement;else if (Input.GetKey(KeyCode.LeftControl)) throttle -= throttleIncrement;// 限制油门范围并标准化throttle = Mathf.Clamp(throttle, 0f, 100f);}void PropulsiveForce(){// 推进力(与油门成正比)rb.AddForce(transform.forward * maxThrust * throttle);}#endregion#region 升力[Header("升力系数")]public float lift = 135f;void LiftForce(){// 动态升力(速度越快升力越大)rb.AddForce(transform.up * rb.linearVelocity.magnitude * lift);}#endregion#region 转向[Header("转向参数")][Tooltip("飞行操控灵敏度系数")]public float responsiveness = 500f;/// <summary>/// 偏航控制(绕Y轴旋转)/// </summary>void Turn(){if (isGround) return;rb.AddTorque(transform.up * _movement.x * responsiveness);}#endregion#region 飞行控制系统[Header("飞行姿态参数")]public float maxPitchAngle = 20f; // 最大俯仰角度public float maxRollAngle = 30f; // 最大滚转角度private Vector2 _currentTiltAngle; // 当前姿态角度/// <summary>/// 机身倾斜效果(根据输入平滑过渡)/// </summary>void Tilting(){if (isGround) return;// 俯仰角度插值_currentTiltAngle.y = Mathf.Lerp(_currentTiltAngle.y,_movement.y * maxPitchAngle,Time.deltaTime * responsiveness);// 滚转角度插值_currentTiltAngle.x = Mathf.Lerp(_currentTiltAngle.x,_movement.x * maxRollAngle,Time.deltaTime * responsiveness);// 应用欧拉角旋转(保持当前偏航角)transform.localRotation = Quaternion.Euler(_currentTiltAngle.y,transform.localEulerAngles.y,-_currentTiltAngle.x);}#endregion#region 环境检测系统[Header("地面检测设置")]public LayerMask groundLayer; // 地面碰撞层public float groundCheckDistance = 5f; // 检测距离[Tooltip("是否处于地面状态")]public bool isGround; // 地面状态标识private RaycastHit _hit; // 射线检测结果/// <summary>/// 地面接触检测(向下发射射线)/// </summary>void HandleGroundCheck(){isGround = Physics.Raycast(transform.position + new Vector3(0,1,1),transform.TransformDirection(Vector3.down),out _hit,groundCheckDistance,groundLayer);}// 编辑器可视化辅助void OnDrawGizmosSelected(){Gizmos.color = Color.red;Gizmos.DrawLine(transform.position + new Vector3(0,1,1),transform.position + new Vector3(0,1,1) + transform.TransformDirection(Vector3.down) * groundCheckDistance);}#endregion#region 螺旋桨旋转效果[Header("螺旋桨")][SerializeField]private Transform propella;void PropellerRotation(){// 螺旋桨旋转效果(转速与油门正相关)propella.Rotate(Vector3.right * throttle * 1000f * Time.deltaTime);}#endregion#region UI显示[Header("UI显示")][SerializeField]private Text hud;/// <summary>/// 更新飞行数据HUD显示/// </summary>private void UpdateHUD(){hud.text = $"油门: {throttle * 100:F0}%\n" +$"空速: {rb.linearVelocity.magnitude * 3.6f:F0} km/h\n" +$"高度: {transform.position.y:F0} m";}#endregion#region 音效void PlaySound(){audioSource.volume = throttle * 0.01f;}#endregion
}
专栏推荐
| 地址 |
|---|
| 【unity游戏开发入门到精通——C#篇】 |
| 【unity游戏开发入门到精通——unity通用篇】 |
| 【unity游戏开发入门到精通——unity3D篇】 |
| 【unity游戏开发入门到精通——unity2D篇】 |
| 【unity实战】 |
| 【制作100个Unity游戏】 |
| 【推荐100个unity插件】 |
| 【实现100个unity特效】 |
| 【unity框架/工具集开发】 |
| 【unity游戏开发——模型篇】 |
| 【unity游戏开发——InputSystem】 |
| 【unity游戏开发——Animator动画】 |
| 【unity游戏开发——UGUI】 |
| 【unity游戏开发——联网篇】 |
| 【unity游戏开发——优化篇】 |
| 【unity游戏开发——shader篇】 |
| 【unity游戏开发——编辑器扩展】 |
| 【unity游戏开发——热更新】 |
| 【unity游戏开发——网络】 |
完结
好了,我是向宇,博客地址:https://xiangyu.blog.csdn.net,如果学习过程中遇到任何问题,也欢迎你评论私信找我。
赠人玫瑰,手有余香!如果文章内容对你有所帮助,请不要吝啬你的点赞评论和关注,你的每一次支持都是我不断创作的最大动力。当然如果你发现了文章中存在错误或者有更好的解决方法,也欢迎评论私信告诉我哦!
