无人机共轴双桨动力测试-如何确认桨叶最优间距(效率/噪音/重量/尺寸)
为什么要采用共轴双桨动力布局?
多旋翼无人机采用共轴双桨动力布局相比传统的单桨布局具有多个显著优势,尤其在追求紧凑性、效率、安全性和稳定性方面。
提升空间效率
共轴多旋翼的最大优点在于空间效率的提升,两个旋翼通过上下安装的方式使得整个动力单元在水平方向上占用的空间显著小于两个独立平面的单桨动力单元。对于需要小型化、便携性或者在有限空间内容纳更多动力单元的多旋翼飞行器来说至关重要。一架八旋翼无人机如果采用共轴双桨设计,只需要四个臂,而不是八个臂结构更简洁紧凑。(例如:DJI FlyCart 100 DJI T100)
 图1 DJI FlyCart 100 (图片来自于网络)
图1 DJI FlyCart 100 (图片来自于网络)

图2 DJI T100农业无人机(图片来自于网络)
更高的升力效率
单位面积升力效率:在相同的桨盘面积(即上下螺旋桨所覆盖的圆盘总面积),共轴双桨布局通常能比单个螺旋桨叶产生更高的总升力。
能量回收:上旋翼旋转产生的下洗气流(涡流)具有旋转动能。下旋翼反向旋转,可以部分回收利用上旋翼涡流中的旋转动能,将其转化为额外的升力,减少了诱导功率损失。
桨盘载荷优化:两个较小的桨叶比一个单一的大桨叶具有更低的桨盘载荷(推力 / 桨盘面积)。较低的桨盘载荷通常意味着更高的可靠性和更低的转动惯量,对飞行是极有利的。
无人机共轴双桨动力构成?
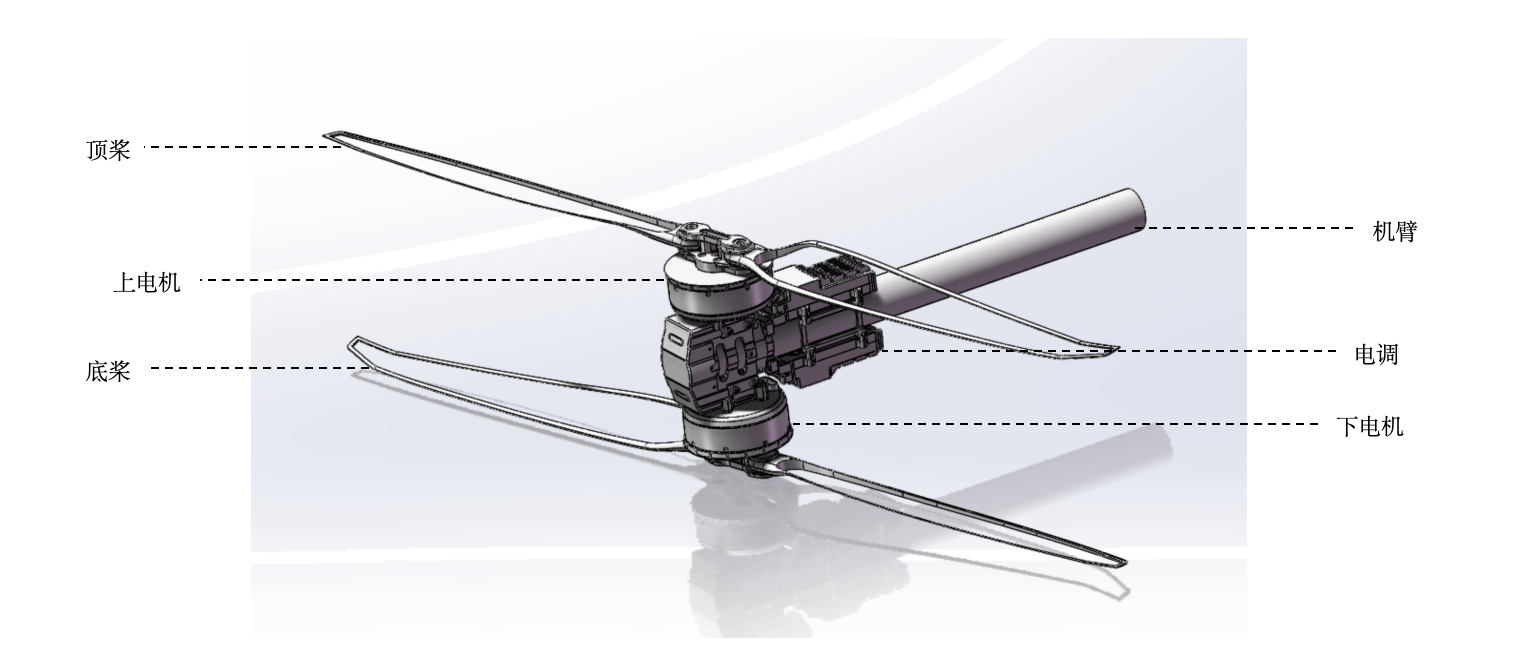
图3 共轴双桨动力构成
电机系统
每组包含两个无刷电机垂直堆叠,分别是上电机和下电机,上电机和下电机旋转方向相反,上电机和下电机提供向上的拉力。上电机提供的拉力大于下电机的拉力。
桨叶系统
桨叶系统包含顶桨和底桨叶,一般直径相同,桨叶数量为2片,多采用碳纤维复合材料。
电调系统
电调系统包含两个独立的电子调速器,可以通过精准调节电机的转速,实现无人机的姿态变化。
如何确定共轴双桨桨叶之间最优间距?
共轴双桨两个桨叶之间的轴向距离(间距)并不是越大越好,也不是越小越好,而是存在一个最优范围,需要根据设计目标进行权衡。这个最优距离是多种因素(效率、噪音、重量、尺寸)相互博弈的结果。
图 4 共轴双桨动力系统
桨叶之间距离不能太大
结构重量和尺寸增加:
增大间距需要更长和更坚固的支撑结构(如机臂、安装座)来保持刚度和稳定性。这直接增加了动力单元的重量和整体高度。对于多旋翼飞行器来说,重量是续航和载重的大敌,而高度增加会影响整机的紧凑性和空气动力学(如阻力)。共轴双桨的核心优势之一是空间紧凑性,过大的间距会削弱这个优势。
桨叶之前距离不能太小
1. 严重的气动干扰与效率损失:
当上下桨叶距离过近时,上桨叶产生的强烈下洗流(涡流) 会直接冲击下桨叶的桨盘。这导致下桨叶是在一个预旋、湍流加剧的气流中工作,其有效迎角和气动效率会显著降低。
2. 振动与噪音加剧:
强烈的气动干扰不仅降低效率,还会引起剧烈的振动。上下桨叶涡流的相互作用会产生高频的、刺耳的噪音,这对无人机应用(尤其是城市环境或需要隐蔽的任务)非常不利。
3. 碰撞风险增加:
在飞行过程中(特别是机动、阵风或桨叶有轻微变形/损伤时),过小的间距大大增加了上下桨叶物理碰撞的风险,可能导致灾难性事故。桨叶的制造公差、材料的热胀冷缩、结构弹性变形等因素都需要安全裕度。
桨叶之间最优间距是多少?
最优间距通常是一个经验值或通过共轴双桨动力测试平台测试确定的。这个最优值通常表达为桨叶直径(D)的一个比例:经验范围: 对于大多数高效设计以及目前市场的共轴双桨产品,上下桨叶盘之间净间距(桨毂到桨毂或桨尖平面到桨尖平面)通常0.15D到0.25D之间。也就是说,间距大约是单个桨叶直径的15%到25%。在这个范围内,工程师可以找到一个平衡点,使得气动干扰(效率损失)控制在可接受水平;振动和噪音在合理范围内;碰撞风险极低;结构增加的重量和复杂度最小化。
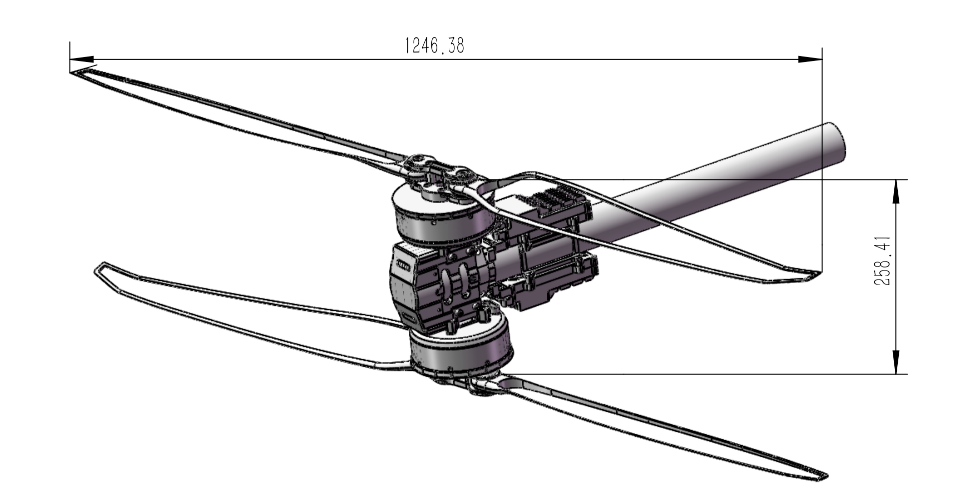 图5 最优间距通常表达为桨叶直径(D)的一个比例
图5 最优间距通常表达为桨叶直径(D)的一个比例
设计共轴双桨时,桨间距的选择是一个关键的优化参数,需要根据具体的应用需求、性能目标(效率、噪音、载重、续航)和工程约束(重量、尺寸、成本)进行仔细的权衡和实验验证。
无人机共轴双桨测试平台测试(获得最优间距)
下面是以WF-CO-MICRO为例介绍测试方法及测试数据。(由于选取共轴动力较小,测试数据仅作为参考,不作为研发设计使用)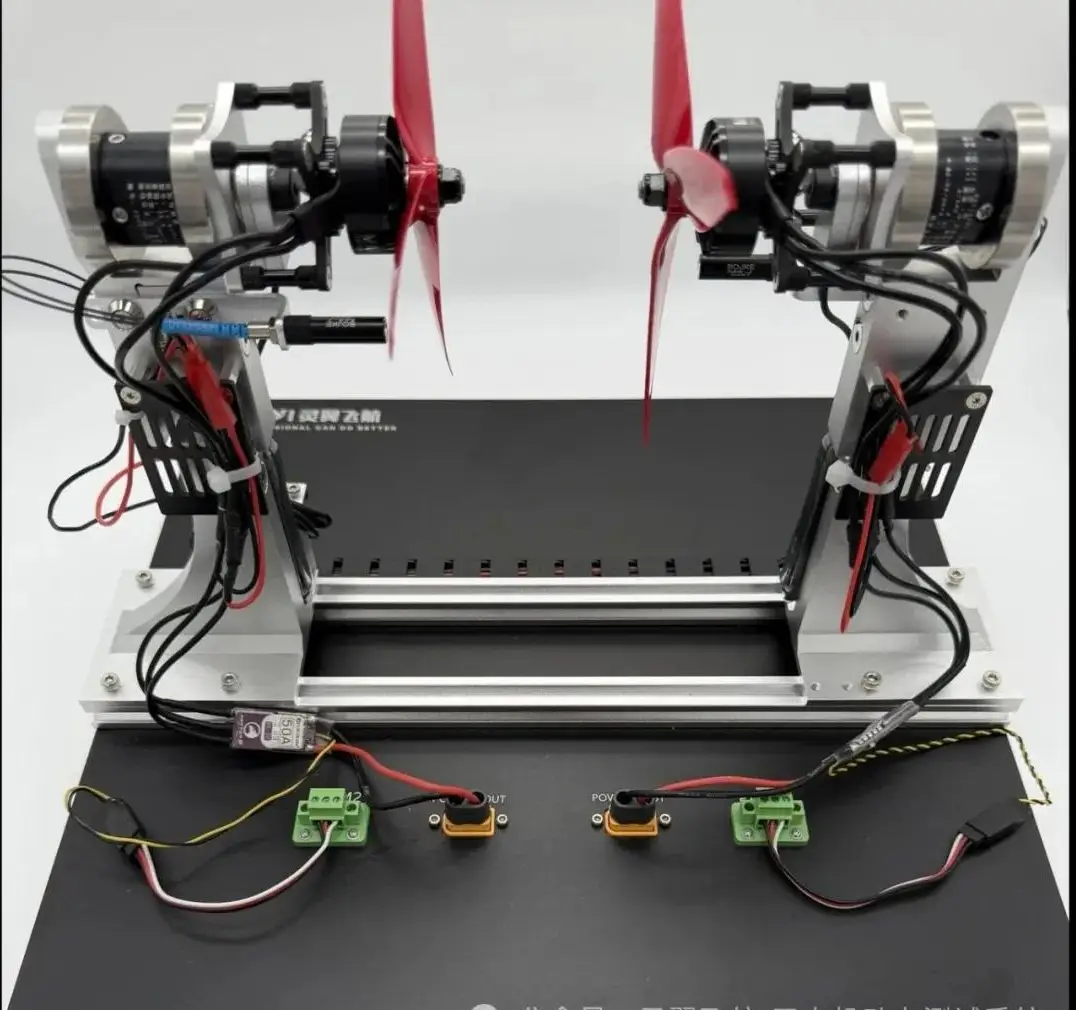
图6 无人机共轴双桨动力测试平台
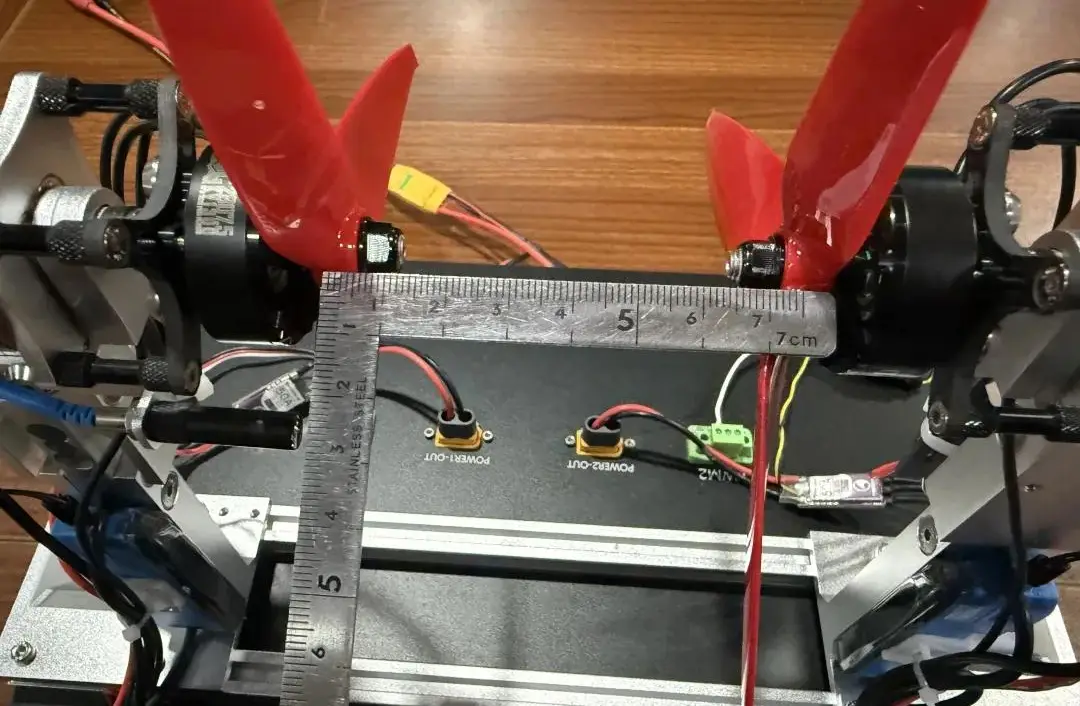
图7 共轴双桨桨间距为7.5CM
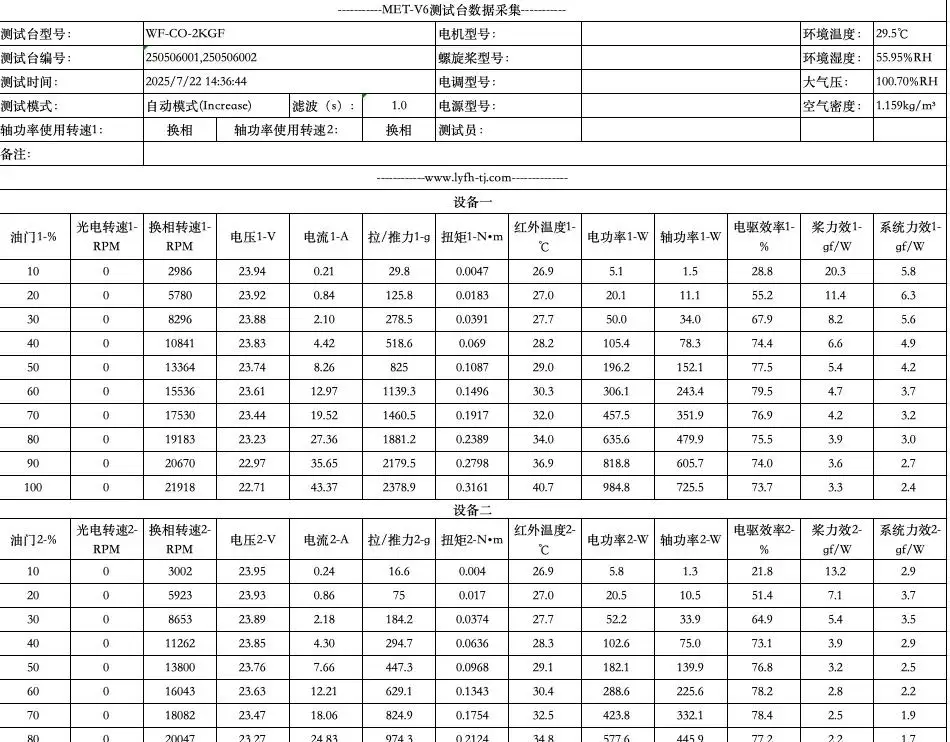
表1 间距为7.5CM测试数据
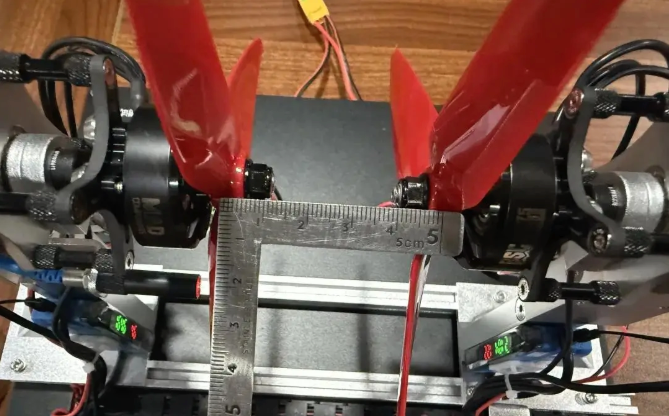
图8 共轴双桨桨间距为5CM
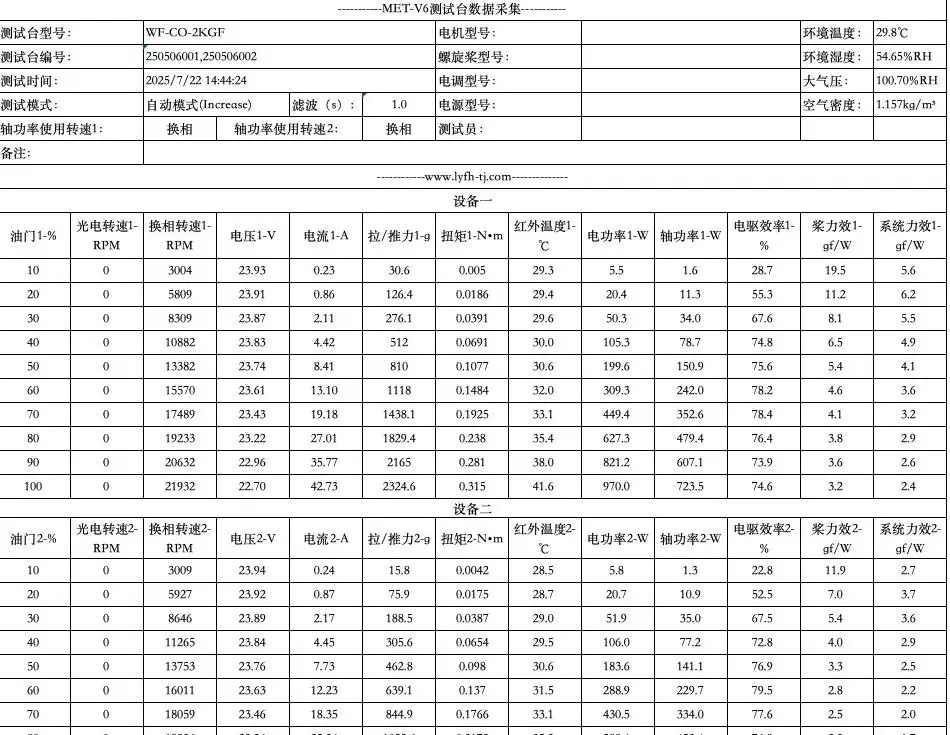
表2 间距为5CM测试数据