STM32CubeIDE新建项目过程记录备忘(八)使用通用定时器中断生成PWM波形
名词解释:PWM
本例是一个PWM输出demo。
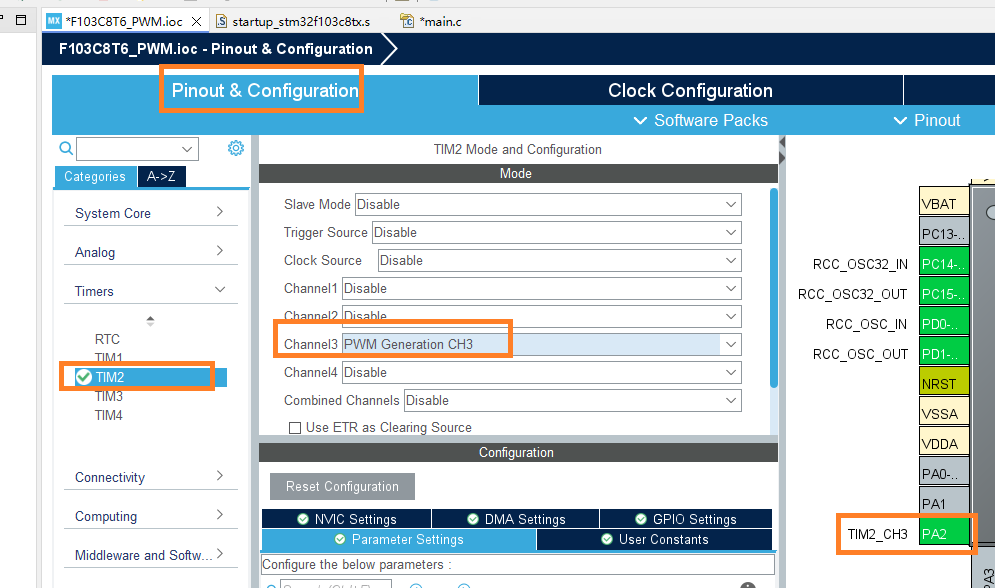
GPIO管脚设置:
将TIM2的Channel3设置为PWM generation GH3,它对应的管脚是PA2,当Channel3设置为PWM generation GH3后,PA2就自动被设置为TIM2_CH3。
PWM载波频率设置:
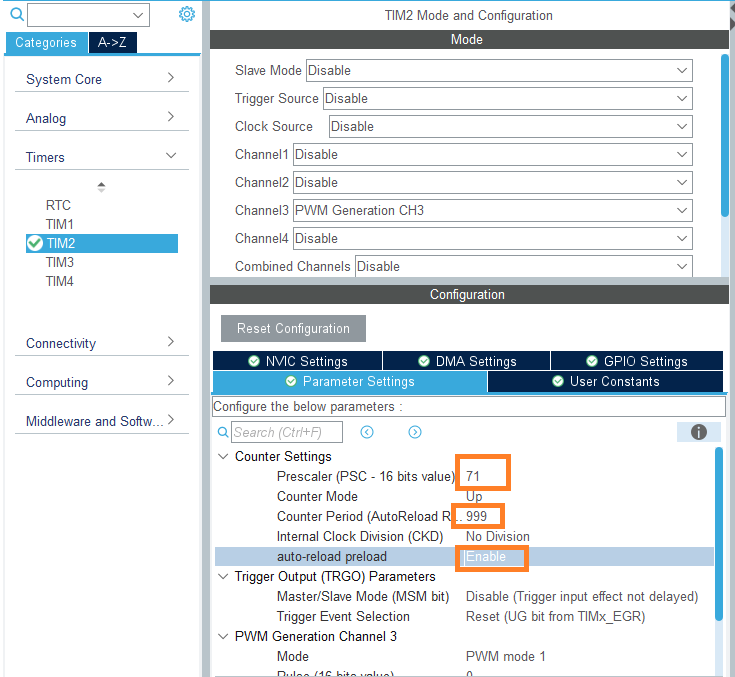
PWM载波频率:
本例的APB1定时器的时钟频率=72MHz。Prescaler=71,Counter Period=999,就可以得到1KHz的载波频率。
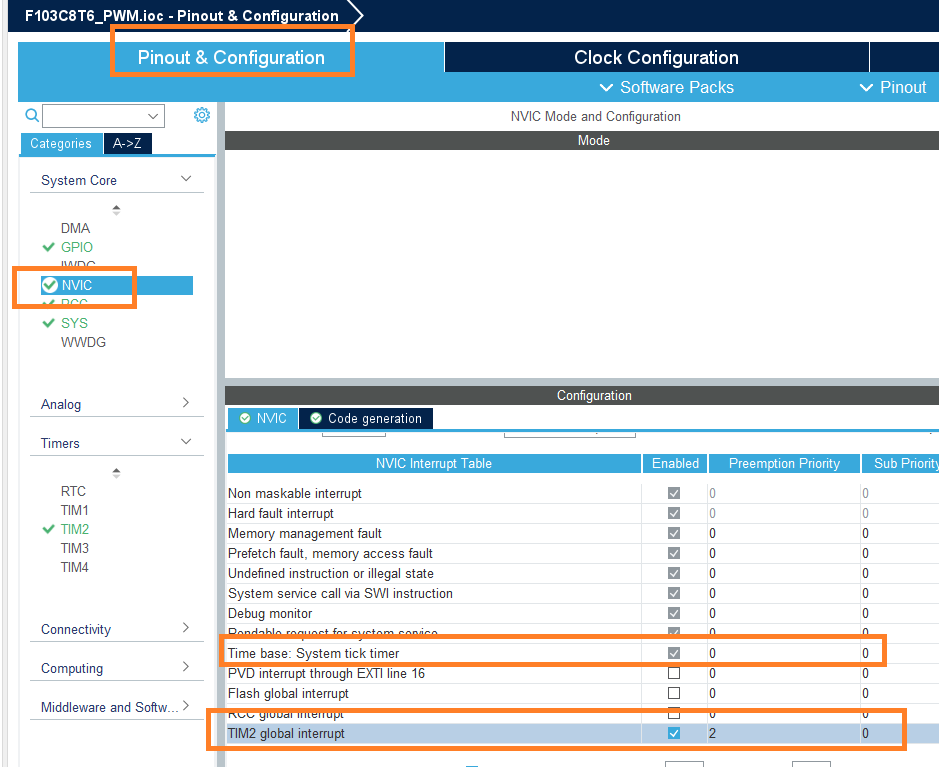
中断配置:
生成代码:
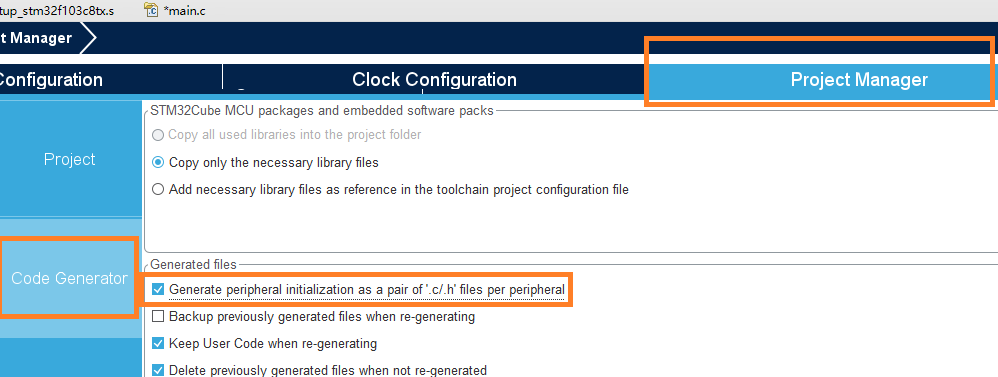
配置完成后生成代码。 记得选这个:
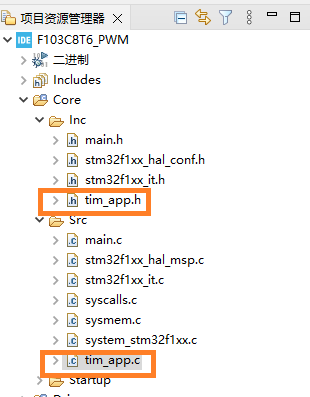
新建tim_app.h 和 tim_app.c 文件:
在tim_app.h内添加代码:
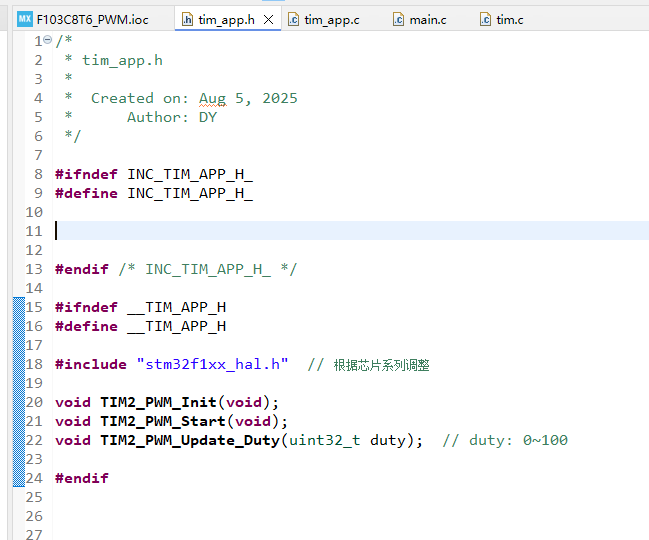
#ifndef __TIM_APP_H
#define __TIM_APP_H#include "stm32f1xx_hal.h" // 根据芯片系列调整void TIM2_PWM_Init(void);
void TIM2_PWM_Start(void);
void TIM2_PWM_Update_Duty(uint32_t duty); // duty: 0~100#endif在tim_app.c内添加代码:
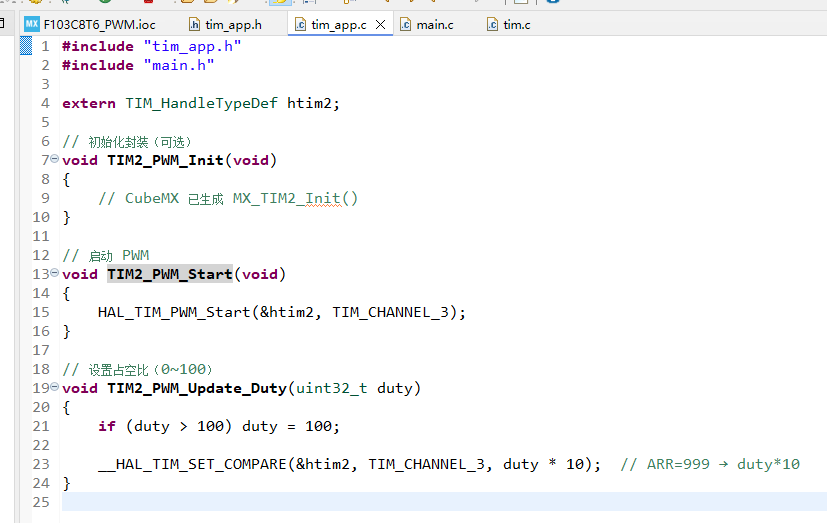
#include "tim_app.h"
#include "main.h"extern TIM_HandleTypeDef htim2;// 初始化封装(可选)
void TIM2_PWM_Init(void)
{// CubeMX 已生成 MX_TIM2_Init()
}// 启动 PWM
void TIM2_PWM_Start(void)
{HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
}// 设置占空比(0~100)
void TIM2_PWM_Update_Duty(uint32_t duty)
{if (duty > 100) duty = 100;__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, duty * 10); // ARR=999 → duty*10
}
在main.c内添加代码:
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
static uint8_t direction = 1; // 1: 增加, 0: 减少
static uint32_t duty = 0; //初始占空比=0%
/* USER CODE END 0 */ 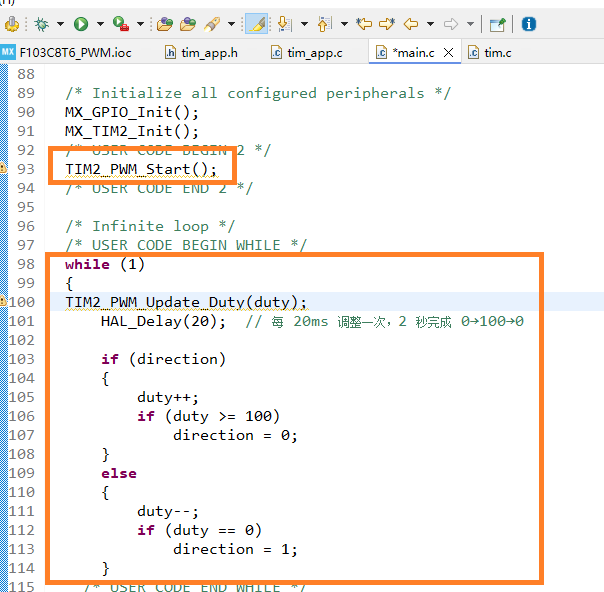
/* USER CODE BEGIN 2 */TIM2_PWM_Start();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){TIM2_PWM_Update_Duty(duty);HAL_Delay(20); // 每 20ms 调整一次,2 秒完成 0→100→0if (direction){duty++;if (duty >= 100)direction = 0;}else{duty--;if (duty == 0)direction = 1;}/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
} 
这里是在main.c的主循环里周期刷新占空比,当然也可以再开一个定时器中断,在定时器中断响应里周期调整占空比。