stm32项目(21)——基于STM32和MPU6050的体感机械臂开发
1.实现功能
读取MPU6050的数据,获取姿态特征,将姿态数据传入到舵机的控制函数里面,从而实现三维姿态数据控制机械臂的三个维度。机械臂(总共四个维度)的另一个维度(爪子抓取),用开发板上的按键来控制。
2.演示视频
基于STM32的体感机械臂开发
3.模块介绍
3.1数字舵机

数字舵机是一种基于数字信号控制的精密伺服电机,广泛应用于机器人、航模、自动化设备等领域。以下是其核心要点:
1. 基本组成
-
电机:通常为直流电机或无刷电机,提供动力。
-
减速齿轮组:降低转速、提高扭矩。
-
控制电路:包含微控制器(MCU)、H桥驱动电路等,负责信号处理和电机控制。
-
电位器/编码器:反馈当前舵机轴的位置,形成闭环控制。
2. 与单片机的接口
-
信号线(3线制):
-
VCC(红):电源(通常4.8V~6V,需匹配舵机电压)。
-
GND(黑/棕):接地。
-
Signal(黄/白):PWM信号输入(占空比控制角度)。
-
-
注意:电源需足够功率,建议与单片机电源隔离(避免干扰)。
3. 信号传输(PWM协议)
-
标准PWM信号:
-
周期:通常20ms(50Hz),但部分高速舵机支持更高频率(如333Hz)。
-
脉冲宽度:0.5ms~2.5ms,对应舵机角度(如0°~180°)。
-
数字舵机特性:可解析更高频的PWM信号,响应速度更快,支持微秒级精度。
-
4. 工作原理
-
信号接收:单片机发送PWM信号至舵机控制电路。
-
角度解析:控制电路根据脉冲宽度计算目标角度。
-
闭环控制:
-
电位器实时反馈当前角度。
-
控制电路比较目标与当前角度,驱动电机转动。
-
-
到达目标:电机停止,维持位置(数字舵机持续修正,静态力矩更大)。
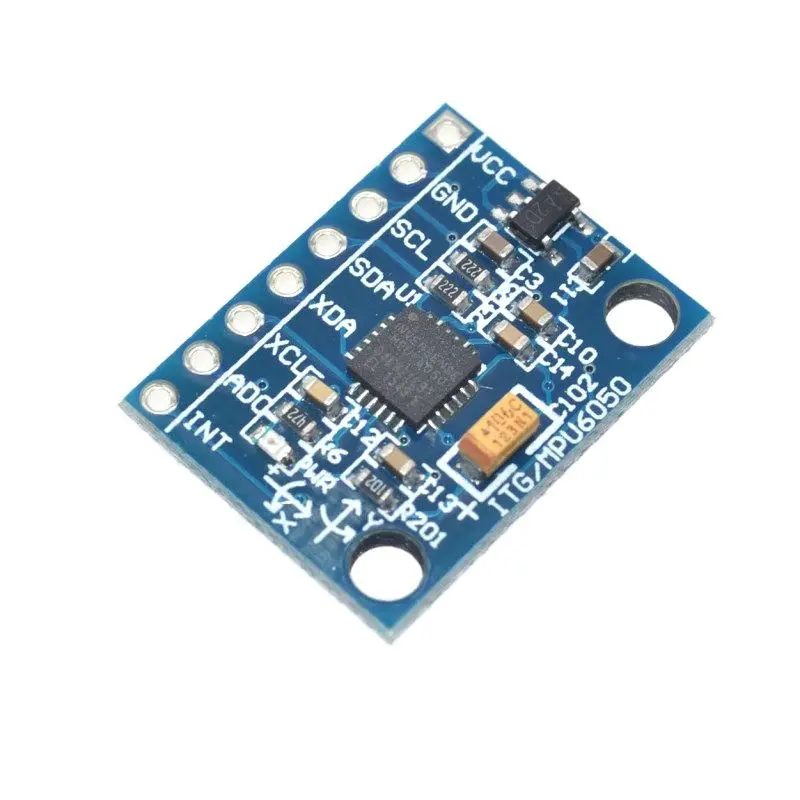
3.2MPU6050
1. 基本功能
-
三轴加速度计:测量 X/Y/Z 轴向的线性加速度(单位:g)。
-
三轴陀螺仪:测量 X/Y/Z 轴向的角速度(单位:°/s)。
-
集成数字运动处理器(DMP):可硬件解算姿态(如俯仰角、横滚角),减轻单片机负担。
-
温度传感器:用于校准。
2. 与单片机的接口
物理连接(4线I²C或SPI)
-
I²C(常用):
-
VCC:3.3V~5V(需与单片机逻辑电平匹配)。
-
GND:接地。
-
SCL:时钟线(需上拉电阻,通常4.7kΩ)。
-
SDA:数据线(需上拉电阻)。
-
AD0:I²C地址选择引脚(接地为0x68,接VCC为0x69)。
-
INT:中断输出(可选,用于数据就绪通知)。
-
-
SPI:速度更快,但引脚占用较多(需连接
CS、MOSI、MISO、SCK)。
3. 信号传输与通信协议
I²C通信流程
-
初始化:单片机配置 I²C 时钟频率(通常 400kHz)。
-
读写数据:
-
写寄存器:发送设备地址(0x68/0x69)+ 寄存器地址 + 数据。
-
读寄存器:先发送寄存器地址,再读取数据。
-
-
数据格式:
-
加速度和陀螺仪数据为 16位有符号整数(需根据量程转换)。
-
原始数据需通过公式转换为物理量(如 °/s 或 g)。
-
MPU6050 通过硬件集成和灵活的接口,为运动感知提供了高性价比的解决方案,结合适当算法可实现精准的姿态估计