薄板样条(TPS, Thin Plate Spline)数学原理推导
1. TPS 的问题描述
想象一块薄钢板,桌上钉了 NNN 根钉子,已知:
1、钉子 iii 的位置:
xi=(xi,yi)\mathbf{x}_i = (x_i, y_i)xi=(xi,yi)
2、每根钉子想要被拉到高度:
ziz_izi
目标:找出一个光滑的曲面 f(x,y)f(x,y)f(x,y),经过所有钉子,且尽量平滑。
2. 建立TPS模型
2.1 弯曲能量函数
二维 TPS 的弯曲能量(这里不做推导,你只需要知道这个方程表示的是薄板的弯曲程度对应的能量E):
E=∬[(∂2f∂x2)2+2(∂2f∂x∂y)2+(∂2f∂y2)2]dxdyE=\iint\left[\left(\frac{\partial^2f}{\partial x^2}\right)^2+2\left(\frac{\partial^2f}{\partial x\partial y}\right)^2+\left(\frac{\partial^2f}{\partial y^2}\right)^2\right]dxdyE=∬[(∂x2∂2f)2+2(∂x∂y∂2f)2+(∂y2∂2f)2]dxdy
物理含义:板子越弯曲,能量越大。
2.2 目标函数
我们想解这个优化问题,最小化以下目标:
(1)拟合所有钉子高度
f(xi,yi)=zif(x_i, y_i) = z_if(xi,yi)=zi
(2) 保证曲面最光滑 → 最小化弯曲能
所以可以写成如下形式:
Loss=∑i=1N(f(xi,yi)−zi)2 + λ⋅E(公式1)\text{Loss} =\sum_{i=1}^{N} \left( f(x_i, y_i) - z_i \right)^2\; + \;\lambda \cdot E (公式1)Loss=i=1∑N(f(xi,yi)−zi)2+λ⋅E(公式1)
- 第一项:拟合误差
- 第二项:弯曲能量
- λ\lambdaλ:平滑参数
带入E,Loss完整形式为:
Loss=min[∑i=1N(f(xi,yi)−zi)2+λ⋅∬(fxx2+2fxy2+fyy2)dxdy](公式2)Loss=\min\left[\sum_{i=1}^N\left(f(x_i,y_i)-z_i\right)^2+\lambda\cdot\iint\left(f_{xx}^2+2f_{xy}^2+f_{yy}^2\right)dxdy\right](公式2)Loss=min[i=1∑N(f(xi,yi)−zi)2+λ⋅∬(fxx2+2fxy2+fyy2)dxdy](公式2)
这是一个变分法问题。
- 第一个部分 → 拟合数据(这部分很好理解,就是最小二乘法能量最小)
- 第二个部分 → 惩罚曲面弯曲(为什么是这样?请看附录1)
2.3 进一步简化表达形式
目的:原有表达形式是刚性和非刚性变化混在一起,难以对每一部分单独划分,因此需要将其拆解为仿射变化和非刚性变化,仿射变换只改变平移、缩放;非刚性负责旋转、弯曲等变换。
通过变分法 + 双调和方程,可以将公式1写为(至于如何化简的,感兴趣去看变分法,这里也不推导了):
f(x,y)=Affine+∑wi⋅U(r)
f(x,y) = \text{Affine} + \sum w_i \cdot U(r)
f(x,y)=Affine+∑wi⋅U(r)
那么公式2即可写为:
f(x,y)=a1⋅x+a2⋅y+a3+∑j=1NwjU(∥(x,y)−(xj,yj)∥)f(x,y)=a_1\cdot x+a_2\cdot y+a_3+\sum_{j=1}^Nw_jU\left(\left\|(x,y)-(x_j,y_j)\right\|\right)f(x,y)=a1⋅x+a2⋅y+a3+j=1∑NwjU(∥(x,y)−(xj,yj)∥)
其中:
-
a1,a2,a3a_1, a_2, a_3a1,a2,a3:仿射项 (表示平面或倾斜面)
-
wjw_jwj:权重,表示每根钉子对弯曲的贡献
-
U(r)U(r)U(r):核函数:
U(r)=r2logr,其中r=∥(x,y)−(xj,yj)∥ U(r) = r^2 \log r,其中 r = \| (x, y) - (x_j, y_j) \| U(r)=r2logr,其中r=∥(x,y)−(xj,yj)∥
3. 建立方程
3.1 约束条件1
因为每根钉子都在平面f(x,y)f(x,y)f(x,y),因此要求:
f(xi,yi)=zif(x_i, y_i) = z_if(xi,yi)=zi
对 i=1,…,Ni = 1, \dots, Ni=1,…,N 都成立。
即:f(xi,yi)=a1xi+a2yi+a3+∑j=1Nwj⋅U(∥(xi,yi)−(xj,yj)∥)f(x_i,y_i)=a_1x_i+a_2y_i+a_3+\sum_{j=1}^Nw_j\cdot U\left(\|(x_i,y_i)-(x_j,y_j)\|\right)f(xi,yi)=a1xi+a2yi+a3+j=1∑Nwj⋅U(∥(xi,yi)−(xj,yj)∥)
3.2 约束条件2
非刚性部分不能有刚性的变化量,所有的刚性变化都必须由仿射量提供,这就是边界条件,因此TPS 必须满足
∑j=1Nwj=0,∑j=1Nwj⋅xj=0,∑j=1Nwj⋅yj=0 \sum_{j=1}^{N} w_j = 0, \\ \sum_{j=1}^{N} w_j \cdot x_j = 0,\\ \sum_{j=1}^{N} w_j \cdot y_j = 0 j=1∑Nwj=0,j=1∑Nwj⋅xj=0,j=1∑Nwj⋅yj=0
意思:弯曲部分 不能产生平移或旋转,这些由仿射项负责。
3.3 矩阵形式
(1) 第一部分: a1xi+a2yi+a3a_1 x_i + a_2 y_i + a_3a1xi+a2yi+a3为仿射项
定义仿射矩阵 PPP:
P=[x1y11x2y21⋮⋮⋮xNyN1]
P =
\begin{bmatrix}
x_1 & y_1 & 1 \\
x_2 & y_2 & 1 \\
\vdots & \vdots & \vdots \\
x_N & y_N & 1
\end{bmatrix}
P=x1x2⋮xNy1y2⋮yN11⋮1
定义核矩阵 c=[a1,a2,a3]Tc=[a1,a2,a3]^Tc=[a1,a2,a3]T
a1xi+a2yi+a3a_1 x_i + a_2 y_i + a_3a1xi+a2yi+a3仿射项可记作写为:
Pc=[x1y11x2y21⋮⋮⋮xNyN1][a1a2⋮aN]
Pc =
\begin{bmatrix}
x_1 & y_1 & 1 \\
x_2 & y_2 & 1 \\
\vdots & \vdots & \vdots \\
x_N & y_N & 1
\end{bmatrix}
\begin{bmatrix}
a_1 \\
a_2 \\
\vdots \\
a_N
\end{bmatrix}
Pc=x1x2⋮xNy1y2⋮yN11⋮1a1a2⋮aN
(2)第二部分:∑j=1Nwj⋅U(∥(xi,yi)−(xj,yj)∥)\sum_{j=1}^{N} w_j \cdot U\bigl( \| (x_i, y_i) - (x_j, y_j) \| \bigr )∑j=1Nwj⋅U(∥(xi,yi)−(xj,yj)∥)为非刚性变换
定义核矩阵 KKK:
Kij=U(∥(xi,yi)−(xj,yj)∥)
K_{ij} = U\bigl(\| (x_i, y_i) - (x_j, y_j) \|\bigr)
Kij=U(∥(xi,yi)−(xj,yj)∥)
定义核矩阵 W=[w1,w2,…,wN]TW = [w_1, w_2, \ldots, w_N]^TW=[w1,w2,…,wN]T
那么,∑j=1Nwj⋅U(∥(xi,yi)−(xj,yj)∥)\sum_{j=1}^{N} w_j \cdot U\bigl( \| (x_i, y_i) - (x_j, y_j) \| \bigr )∑j=1Nwj⋅U(∥(xi,yi)−(xj,yj)∥)非刚性项则可以记作:
KW=[K11,K12,…Kij][w1w2⋮wN]
KW =
\begin{bmatrix}
K_{11} ,
K_{12},
\dots
K_{ij}
\end{bmatrix}
\begin{bmatrix}
w_1 \\
w_2 \\
\vdots \\
w_N
\end{bmatrix}
KW=[K11,K12,…Kij]w1w2⋮wN
(3)还差一个是边界条件
PT⋅W=[x1x2x3y1y2y3⋮⋮⋮111][w1w2⋮wN]=0P^T·W=\begin{bmatrix} x_1 & x_2 & x_3 \\ y_1 & y_2 & y_3 \\ \vdots & \vdots & \vdots \\ 1 & 1 & 1 \end{bmatrix} \begin{bmatrix} w_1 \\ w_2 \\ \vdots \\ w_N \end{bmatrix} = 0PT⋅W=x1y1⋮1x2y2⋮1x3y3⋮1w1w2⋮wN=0
(4) 一二部分相加(仿射+非刚性):
f(xi,yi)=a1xi+a2yi+a3+∑j=1Nwj⋅U(∥(xi,yi)−(xj,yj)∥)f(x_i,y_i)=a_1x_i+a_2y_i+a_3+\sum_{j=1}^Nw_j\cdot U\left(\|(x_i,y_i)-(x_j,y_j)\|\right)f(xi,yi)=a1xi+a2yi+a3+j=1∑Nwj⋅U(∥(xi,yi)−(xj,yj)∥)
就可以记作:
Z=Pc+KWZ=Pc+KWZ=Pc+KW
边界部分:
PT⋅W=0P^T·W=0PT⋅W=0
(5) 约束1和约束2写成矩阵方程:
[KPPT0]⋅[Wc]=[Z0]\begin{bmatrix}K&P\\P^T&0\end{bmatrix}\cdot\begin{bmatrix}W\\c\end{bmatrix}=\begin{bmatrix}Z\\0\end{bmatrix}[KPTP0]⋅[Wc]=[Z0]
4 代码实现
import numpy as np
import matplotlib.pyplot as plt# ------------------------
# 定义控制点
# ------------------------# 控制点坐标 (x, y)
points = np.array([[0, 0],[1, 0],[0, 1],[2, 1],[1, 2],[0, 2]
])# 每个控制点想要达到的高度
heights = np.array([0, 2, 1, 3, 1, 0])N = points.shape[0]# ------------------------
# 计算核矩阵 K
# ------------------------def U(r):# 为避免 log(0),加一个极小值r[r == 0] = 1e-20return r**2 * np.log(r)# pairwise distance matrix
dist_matrix = np.linalg.norm(points[:, np.newaxis, :] - points[np.newaxis, :, :],axis=2
)K = U(dist_matrix)# ------------------------
# 构造 P 矩阵
# ------------------------# 对每个点,P = [x, y, 1]
P = np.hstack((points,np.ones((N, 1))
))# ------------------------
# 拼接完整矩阵
# ------------------------# 大矩阵 A
A_upper = np.hstack((K, P))
A_lower = np.hstack((P.T, np.zeros((3,3))))
A = np.vstack((A_upper, A_lower))# 构造右边的向量
Y = np.concatenate([heights, np.zeros(3)])# ------------------------
# 解方程
# ------------------------params = np.linalg.solve(A, Y)# 提取结果
W = params[:N]
a1, a2, a3 = params[N:]print("权重 W =", W)
print("仿射项 = ", [a1, a2, a3])# ------------------------
# 计算网格上的值
# ------------------------# 建一个网格
grid_x, grid_y = np.meshgrid(np.linspace(-0.5, 3, 50),np.linspace(-0.5, 3, 50)
)grid_points = np.vstack((grid_x.ravel(),grid_y.ravel()
)).T# 计算每个网格点到所有控制点的距离
dists_to_points = np.linalg.norm(grid_points[:, np.newaxis, :] - points[np.newaxis, :, :],axis=2
)U_values = U(dists_to_points) # shape = (M, N)# 弯曲部分
bending_part = U_values @ W# 仿射部分
affine_part = a1 * grid_points[:,0] + a2 * grid_points[:,1] + a3# 总 TPS
grid_heights = bending_part + affine_part
grid_heights = grid_heights.reshape(grid_x.shape)# ------------------------
# 绘制曲面
# ------------------------fig = plt.figure(figsize=(8, 6))
ax = fig.add_subplot(111, projection='3d')
ax.plot_surface(grid_x, grid_y, grid_heights, cmap='viridis', alpha=0.8)# 绘制控制点
ax.scatter(points[:,0], points[:,1], heights, color='r', s=50, label='Control Points')ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Height')
ax.set_title('TPS')
ax.legend()
plt.show()
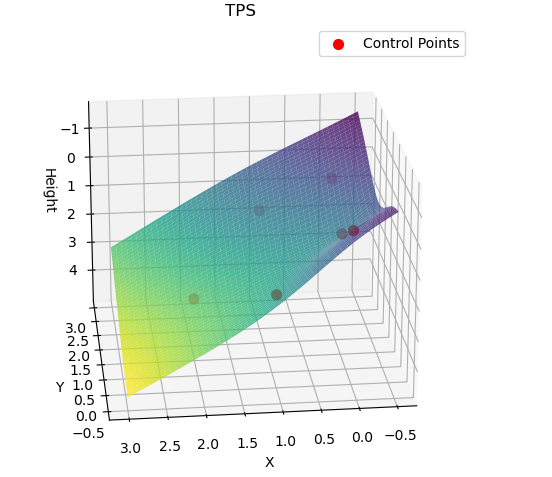
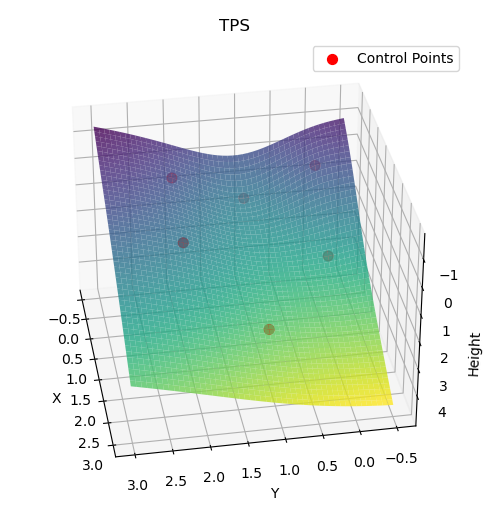
运行结果
权重 W = [-5.6051292e-01 1.9983916e-01 7.2134752e-01 8.2778442e-17
-1.9983916e-01 -1.6083460e-01]
仿射项 = [1.451205059304602, -0.25000000000000006, 1.2499999999999998]