无人机EIS增稳技术要点分析
一、模块运行要点
1. 核心原理
EIS通过运动估计与补偿实现增稳:
运动估计:利用陀螺仪、加速度计检测无人机的角速度与线性加速度,结合IMU(惯性测量单元)数据计算摄像头的瞬时抖动轨迹。
帧内裁剪:以画面中心为基准,根据抖动方向反向平移图像,裁剪边缘区域补偿位移,输出稳定画面。
多传感器融合:部分系统结合视觉传感器(如光流)辅助运动检测,提升复杂场景下的精度。
2. 算法流程
姿态解算:将IMU原始数据转换为欧拉角(俯仰、横滚、偏航),构建云台期望角模型。
运动矢量生成:计算相邻帧间特征点位移,生成全局运动矢量。
动态裁切与补偿:结合陀螺仪数据与运动矢量,实时调整裁剪区域边界,确保画面平滑过渡。
3. 硬件协同
传感器模块:高精度MEMS陀螺仪(如6050系列)提供低延迟姿态数据。
恒温控制:部分高端云台配备加热片与保温层,维持陀螺仪工作温度稳定,避免温漂误差。
处理器要求:需支持实时图像处理(如FPGA或专用ISP芯片),处理延迟需低于20ms。
二、技术难点
1. 动态场景干扰
快速移动物体或背景变化可能导致运动估计错误,如将前景运动误判为抖动,造成画面跳跃。
解决方案:采用前景分割算法(如光流分割)区分主体运动与全局抖动。
2. 裁切与画质平衡
大幅抖动需更大裁剪范围(通常牺牲10-15%画面),导致分辨率损失与视野缩窄,尤其在广角镜头中显著。
挑战:需在抖动幅度与画质损失间动态优化裁切策略。
3. 多轴耦合干扰
无人机三轴运动(俯仰、横滚、偏航)存在耦合效应,传统PID控制易因变量耦合导致响应滞后或超调。
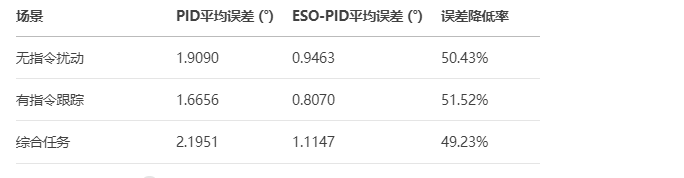
案例:实验显示,耦合干扰可使传统PID角度误差达1.9°,而ESO-PID算法可降至0.94°。
4. 极端环境适应性
温度敏感性:陀螺仪零偏稳定性易受温度影响(如-20℃至60℃环境),需恒温控制或温度补偿算法。
振动干扰:螺旋桨高频震动(100-500Hz)可能穿透机械减震系统,导致图像微颤。
三、技术要点与突破方向
1. 先进控制算法
ESO-PID复合控制:通过扩张状态观测器(ESO)实时估计并补偿角速度扰动,降低耦合效应。实验表明,相比传统PID,角度误差可减少50-69%。
自适应PID:根据负载重量与运动状态动态调整参数,避免电机过载或响应不足。
2. 硬件级优化
非接触式角度检测:以磁编码器替代电位器,通过磁通量变化计算电机转角,避免机械磨损与不同轴误差。
多级减速机构:采用铜钢齿轮组合(传动比1:2.34+1:4.09),提升大质量天线云台的扭矩精度。
3. 多模态增稳融合
EIS+OIS协同:部分高端机型(如Oppo旗舰手机)结合镜头光学防抖(OIS)与EIS,OIS补偿低频抖动,EIS处理高频晃动,综合提升稳定性。
机械云台辅助:两轴/三轴机械云台(如LOPOM YG001)承担基础增稳,EIS处理残余抖动,降低算法负荷。
4. 低延时传输与处理
ZipStream编码技术(如Axis摄像机):动态调整码率,减少带宽占用,确保EIS处理后的高清视频实时传输。
专用ISP芯片:集成陀螺仪数据接口与图像处理单元,缩短数据通路延迟至毫秒级。
四、性能对比:传统PID vs ESO-PID算法