TI 毫米波雷达走读系列—— 3DFFT及测角
TI 毫米波雷达走读系列—— 3DFFT及测角
- 测角原理 —— 角度怎么测
- 测角公式 —— 角度怎么算
- 相位差测角基本公式
- 为什么是3DFFT
- 1. 空间频率与角度的对应关系
- 2. FFT的数学本质:离散空间傅里叶变换
测角原理 —— 角度怎么测
本节内容解决角度怎么测的问题,首先要根据测角的场景对测角过程进行建模。
测角模型的第一个前提是 前方目标距离雷达较远(远场),这样目标的反射波是到达雷达阵前是可以近似成一个平行波面,即反射波到达雷达各个RX天线的入射角是一样的。如下图所示(假设共有8个RX天线)
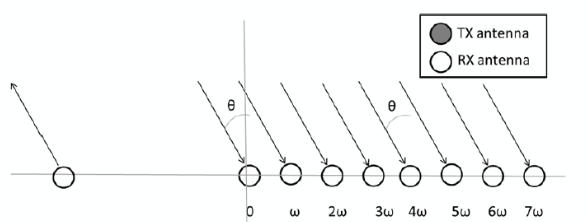
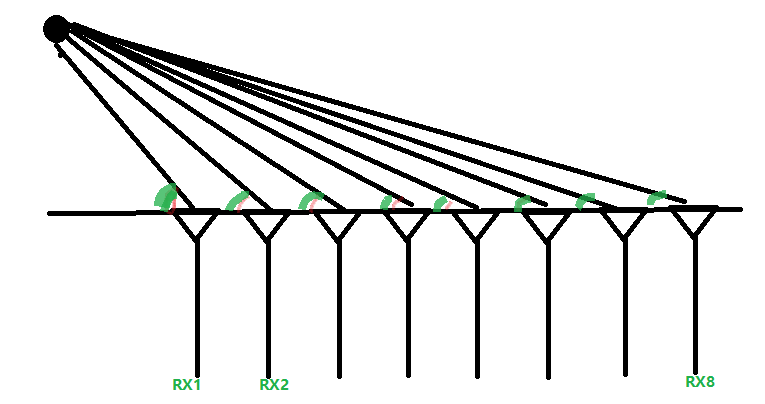
强调这个前提的原因在于,通常情况下,我们会将雷达远场的目标抽象成一个点目标,如果还保持这种前提和思路去看待雷达测角原理,那么我们建立的模型是一个点产生的反射波,点反射波到达雷达接收天线阵前不是平行波,对于不同的RX天线而言,目标点的到达的角度各不相同。如下图所示. 所以如果按照下面的模型进行建模是不行的,所以我们测角原理的第一个前提是 “目标在雷达远场”,关于在近场的情况如何进行分析,后面的章节我们会提到,当前所有的分析基于远场进行。
测角公式 —— 角度怎么算
相位差测角基本公式
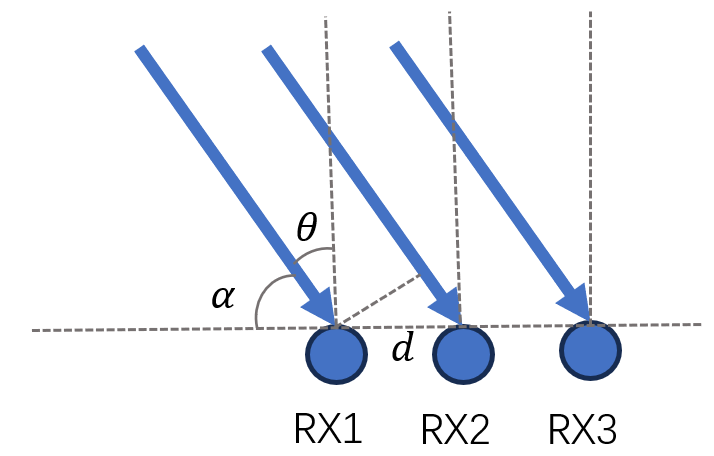
如下图,假设接收天线之间的距离为 d d d,目标物体与雷达连线和雷达正方向(垂直于雷达天线板的法线方向)的夹角为 θ \theta θ ,则距离差 Δ d = d sin θ \Delta d = d \sin\theta Δd=dsinθ 。
如何理解这里的距离差 Δ d \Delta d Δd,对 Δ d \Delta d Δd的分析基于以下几点:
- 雷达发射的电磁波在空间中按照直线传播
- 波的传播在空间中满足 v = λ f v = \lambda f v=λf ,其中 v v v、 λ \lambda λ、 f f f分别代表波速、波长、频率。电磁波的传输满足此公式。
- 波长的定义为波在一个周期内传播的距离。
- 电磁波在空间中的传播约为 3 ∗ 10 8 m / s 3*10^8 m/s 3∗108m/s
- 一个周期内电磁波相位变化为 2 p i 2pi 2pi
结合以上内容,在雷达信号发射频域确定的情况下(77GHz),雷达发射的电磁波在空间中传播的波长是确定的,即在一个周期内传播的距离是确定的。
将其代入相位差公式 Δ Φ 2 π = Δ d λ \frac{\Delta\Phi}{2\pi} = \frac{\Delta d}{\lambda} 2πΔΦ=λΔd 中,得到
Δ Φ = 2 π Δ d λ \Delta\Phi = \frac{2\pi\Delta d}{\lambda} ΔΦ=λ2πΔd
进一步得到
Δ Φ = 2 π d sin θ λ \Delta\Phi = \frac{2\pi d \sin\theta}{\lambda} ΔΦ=λ2πdsinθ
变形求解角度 θ \theta θ ,可得 θ = arcsin ( λ Δ Φ 2 π d ) \theta = \arcsin(\frac{\lambda \Delta\Phi}{2\pi d}) θ=arcsin(2πdλΔΦ)
在这个公式中, λ \lambda λ为毫米波的波长,它由雷达的工作频率决定,不同的毫米波雷达工作频率不同,波长也相应不同; Δ Φ \Delta\Phi ΔΦ为通过测量得到的相位差,是计算角度的关键输入量; d d d为接收天线之间的间距,是雷达硬件设计中的一个重要参数,它直接影响着角度测量的精度和分辨率。
下面举例说明使用相位差法计算角度的过程:
当波长 λ = 4 m m \lambda = 4mm λ=4mm ,接收天线间距 d = 10 m m d = 10mm d=10mm ,测量得到的相位差 Δ Φ = π 2 \Delta\Phi = \frac{\pi}{2} ΔΦ=2π 时,代入公式可计算出目标物体的角度 θ = arcsin ( 4 × 10 − 3 × π 2 2 π × 10 × 10 − 3 ) = arcsin ( 0.1 ) ≈ 5.74 ∘ \theta = \arcsin(\frac{4\times10^{-3} \times \frac{\pi}{2}}{2\pi \times 10\times10^{-3}}) = \arcsin(0.1) \approx 5.74^{\circ} θ=arcsin(2π×10×10−34×10−3×2π)=arcsin(0.1)≈5.74∘
为什么是3DFFT
刚刚我们解释了利用相位差求解角度的基本公式推导过程,一般情况下我们对于角度的计算是通过3DFFT实现的,这节我们将解释3DFFT与刚刚的相位差测角的关系,即回答为什么可以用3DFFT实现测角的问题
角度维FFT能够实现角度测量的核心原理在于利用天线阵列接收信号的相位差特性与空间频率的对应关系。
1. 空间频率与角度的对应关系
将天线阵列视为一个空间采样系统,各阵元的接收信号可看作对空间场分布的采样。目标角度 θ \theta θ 对应于信号在空间中的频率分量(即空间频率),其表达式为:
k = 2 π d λ sin θ k = \frac{2\pi d}{\lambda} \sin\theta k=λ2πdsinθ
其中, k k k 表示空间频率(单位:rad/m)。角度维FFT的本质是对天线阵列接收信号进行空间频率分析,通过检测频谱中的峰值位置,反推出对应的空间频率 k k k,进而解算出目标角度 θ \theta θ。
2. FFT的数学本质:离散空间傅里叶变换
假设阵列有 N N N 个阵元,接收信号为 x ( n ) x(n) x(n) ( n = 0 , 1 , … , N − 1 n=0,1,\dots,N-1 n=0,1,…,N−1),则角度维FFT可表示为:
X ( k ) = ∑ n = 0 N − 1 x ( n ) e − j 2 π N k n X(k) = \sum_{n=0}^{N-1} x(n) e^{-j\frac{2\pi}{N}kn} X(k)=n=0∑N−1x(n)e−jN2πkn
当目标角度对应的空间频率 k k k 与FFT的某个频率点 k p k_p kp 匹配时, X ( k p ) X(k_p) X(kp) 将出现峰值。通过峰值位置 k p k_p kp,结合空间频率与角度的关系式,即可计算出目标角度:
θ = arcsin ( k p λ 2 π d ) \theta = \arcsin\left( \frac{k_p \lambda}{2\pi d} \right) θ=arcsin(2πdkpλ)
所以可以使用FFT来进行角度的换算。
后面的内容我们将介绍Capon算法 和 MUSIC 算法。