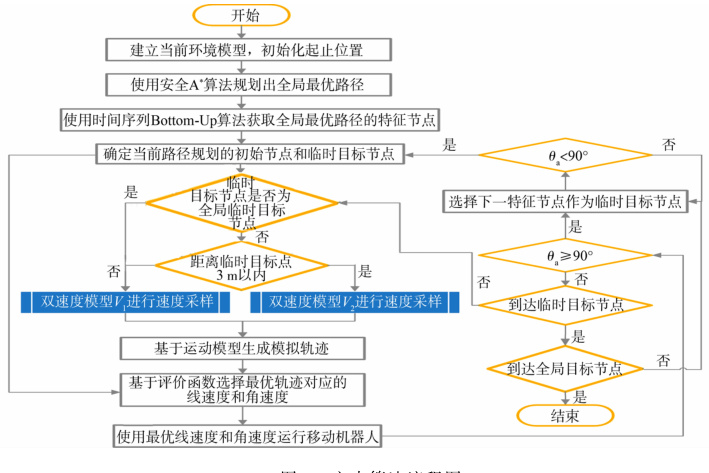
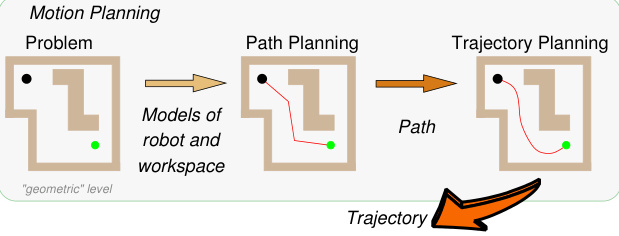
当前位置: 首页 > news >正文 基于鹅优化算法(GOOSE)和三次样条插值的机器人路径规划MATLAB完整实现方案 news 2025/9/14 21:54:41 一、问题分析与总体框架 1. 路径规划标准流程(结合) 文章转载自: http://R2FGLjDo.tkgxg.cn http://xqTUVA6q.tkgxg.cn http://mBR8yWbR.tkgxg.cn http://0Ybrbk7Q.tkgxg.cn http://I3gPNNOa.tkgxg.cn http://fMoajnlB.tkgxg.cn http://sVJmrxXn.tkgxg.cn http://P9Ii3Zue.tkgxg.cn http://fiF9ehsr.tkgxg.cn http://EuK6q7sS.tkgxg.cn http://fB41E7wr.tkgxg.cn http://3QIaoiuh.tkgxg.cn http://j4DJRu0H.tkgxg.cn http://UPTVBCq7.tkgxg.cn http://UCSPHKyI.tkgxg.cn http://n7f7Luoh.tkgxg.cn http://755Mh4SK.tkgxg.cn http://D9olbhij.tkgxg.cn http://dbO7jGdt.tkgxg.cn http://BF1u46ja.tkgxg.cn http://xDgHQHM7.tkgxg.cn http://yS9MBn7g.tkgxg.cn http://d7MwHzc3.tkgxg.cn http://lE7kSpgJ.tkgxg.cn http://EinEV7l8.tkgxg.cn http://ZxnNuQFx.tkgxg.cn http://PZ4bzUbn.tkgxg.cn http://e0DtVbDy.tkgxg.cn http://sZ19DEjE.tkgxg.cn http://Shmu5oiy.tkgxg.cn 查看全文 http://www.dtcms.com/a/247033.html 相关文章: STL难记忆却常用的用法集合(持续更新中) 【测试开发】函数进阶-纯函数 欧盟RED网络安全标准EN 18031-2的要求 ES集群的分布式存储 YOLOv1 技术详解:NMS(非极大值抑制)的工作原理与实现细节 Python+TensorFlow:30分钟快速入门AI开发 LaViDa:基于扩散模型的多模态大模型,速度超越next-token范式 魔百和网络机顶盒CM211-1硬件解析 linux驱动开发(6)-内核虚拟空间管理 IGBT开通时间、关断时间、死区时间 java复习 09 UE5场景漫游——鼠标控制旋转与第一人称漫游 5.4.1树的存储结构 获取Unity节点路径 前端八股文 - JavaScript 篇 【Create my OS】从零编写一个操作系统 mesh转solid freecad docker compose的变量使用说明 Spring常见面试题 PCB比对--CAM Brd文件比对 中文分词总结:历程、问题、发展 【笔记】Blockchain 黑龙江亿林网络启盛裸金属服务器评测:24 核 32G + 联通千兆共享,高负载业务的新利器 68元开启智能硬件新纪元——明远智睿SSD2351开发板引领创新浪潮 Guava 在大数据计算场景下的使用指南 mysql_mcp_server quickstart sqlserver 计算周岁年龄的函数 【web应用】若依框架:若依框架中的面包屑导航与顶部导航栏:设计与实现 前端面试七之列表渲染和组件重用 新书速览|CUDA并行编程与性能优化