DEVICENET转MODBUS TCP网关连接ABB机器人配置案例
在工业自动化场景中,DeviceNet和Modbus TCP是两种常见的通信协议。DeviceNet通常用于连接现场设备(如传感器、执行器等),而Modbus TCP则广泛应用于以太网环境下的远程监控和数据采集。当需要将基于DeviceNet协议的ABB机器人集成到支持Modbus TCP的控制系统中时,MODBUS TCP转DEVICENET网关成为关键设备。
在汽车制造、焊接生产线等场景中,ABB机器人通常通过DeviceNet协议与本地控制器通信。随着工厂数字化升级,新的生产管理系统可能基于Modbus TCP协议构建,此时需要通过网关实现DeviceNet与Modbus TCP的协议转换,以实现机器人与上位机(如WinCC)的通信。硬件设备:MODBUS TCP转DEVICENET网关。ABB机器人(支持DeviceNet接口)。以太网交换机、电缆等网络设备。软件工具:网关配置软件(Gateway Configuration Studio)。
Modbus TCP客户端(如WinCC、PLC等)。将网关的DeviceNet接口与ABB机器人的DeviceNet端口连接。将网关的Modbus TCP接口通过以太网连接到控制系统网络。确保电源和信号线连接正确,避免松动或接触不良。网关DeviceNet侧配置:设置网关的DeviceNet站地址(0-31),确保与机器人配置一致。
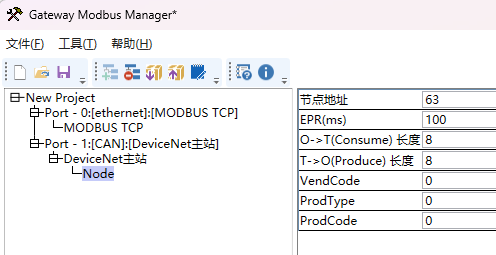
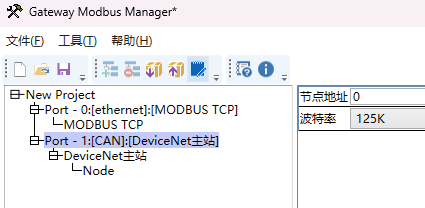
配置DeviceNet的波特率(125K、250K、500K),与机器人匹配。
Modbus TCP侧配置:设置网关的IP地址、子网掩码、网关地址,确保与控制系统网络兼容。
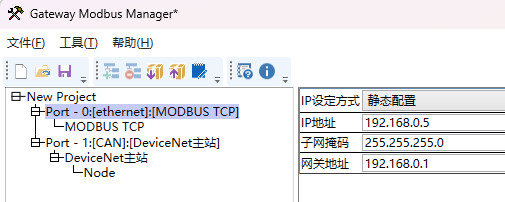
配置Modbus TCP一侧的数据交换长度,字节顺序以及掉线后数据处理方式。
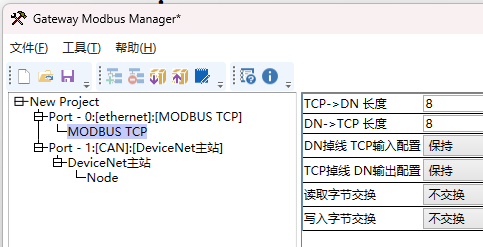
使用网关配置软件,将ABB机器人的DeviceNet数据地址映射到Modbus TCP寄存器地址。例如:将机器人的状态信息(如关节角度、运行状态)映射到Modbus TCP的保持寄存器(如40001-49999)。将控制指令(如运动轨迹、速度设定)从Modbus TCP映射到DeviceNet的控制字。注意:(内存映射自动对应,DviceNet从站数据会按顺序映射到网关Modbus寄存器)启动网关,检查DeviceNet和Modbus TCP的通信状态。通过Modbus TCP客户端(如WinCC)读取机器人状态信息,并发送控制指令,验证通信是否正常。通过以上配置案例,可以高效实现DeviceNet与Modbus TCP的协议转换,满足ABB机器人与现代控制系统的集成需求。如需更详细的技术支持,可参考相关产品手册或联系设备供应商。