EtherCAT 转 CANopen 网关与伺服器在配置软件上的配置步骤
在某自动化生产线升级项目中,旧伺服电机采用 CANopen 协议,新控制系统基于 EtherCAT 网络。为复用设备、降低成本,引入 EtherCAT 转 CANopen 网关,实现新老设备互联,支持伺服电机位置、速度、转矩精准控制与状态实时反馈,保障产线高效运行。
EtherCAN转CANopen网关控制伺服电机

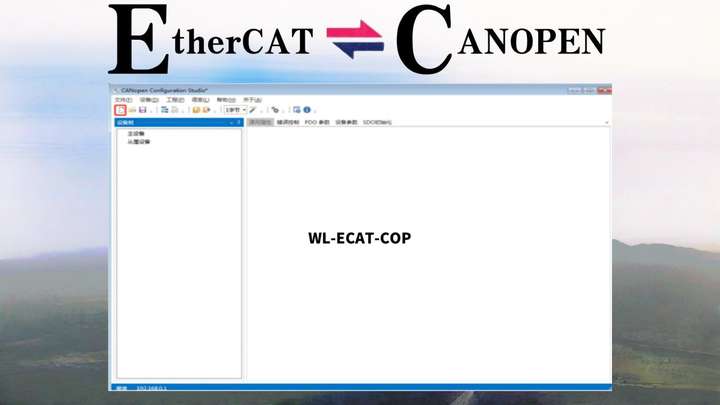
启动CANopen Configuration Studio配置附属软件,创建一项新的项目:
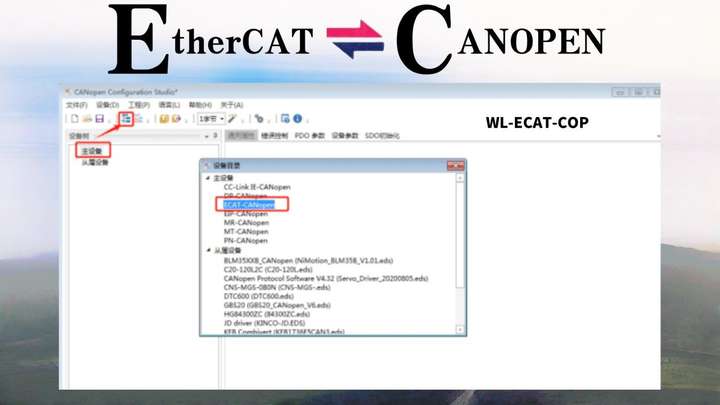
通过点选操作将主站设备添加至列表,于设备列表中选定主站设备:
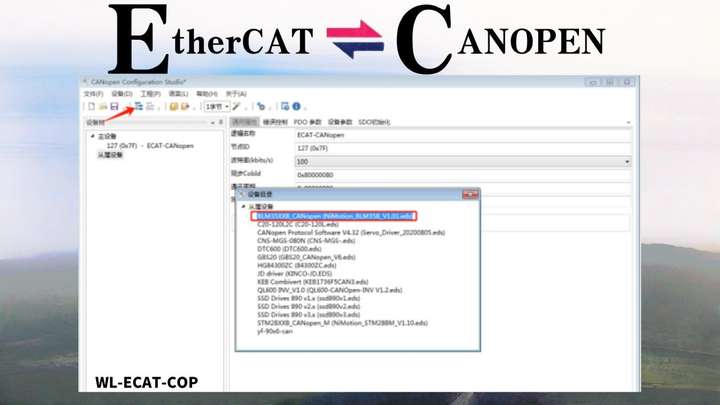
通过点选设备的方式,完成“子站描述文件”EDS文件的导入操作。
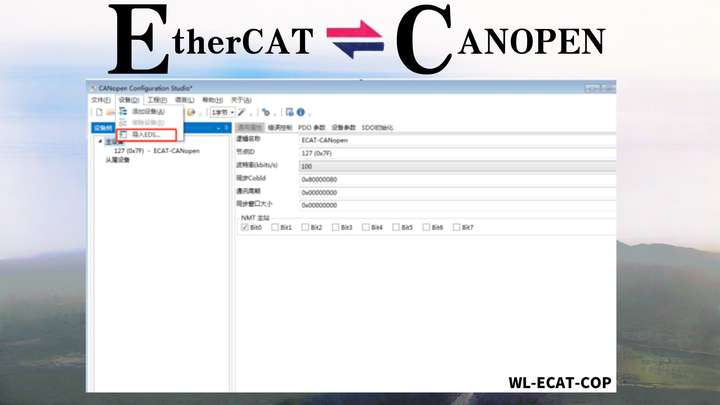
点选添加从站设备在设备目录找到点选描述文件:
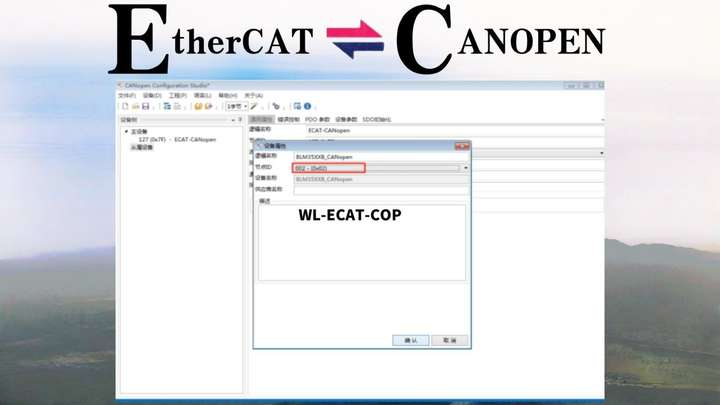
选定电机节点的标识符(ID)进行点选确认:
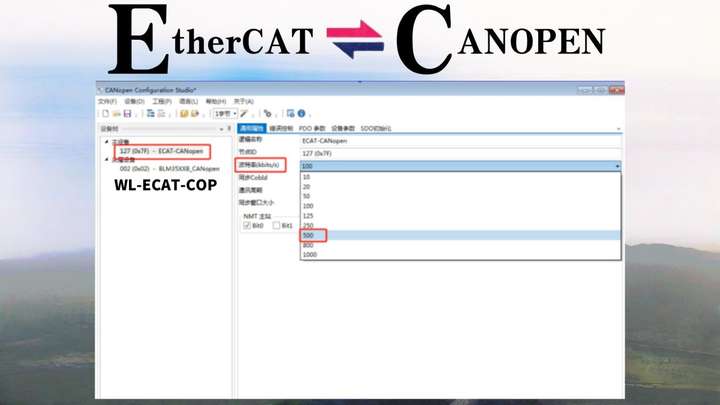
选取主设备,于通用属性里对电机的波特率予以设置,需保证该波特率与伺服设备的波特率相一致。
在站设备的PDO参数范围内进行挑选,进而添加对应的PDO:
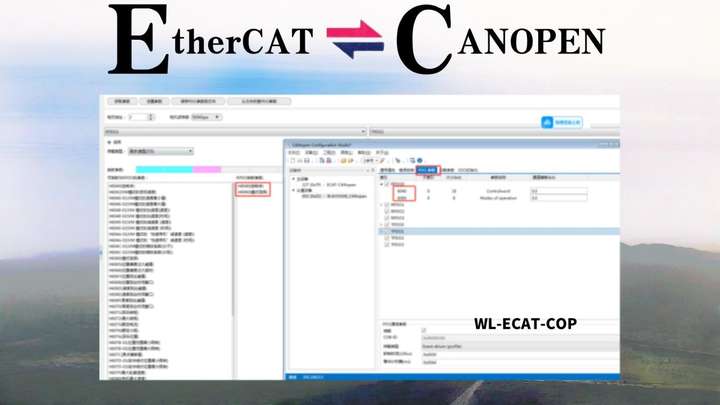
右击打开添加:
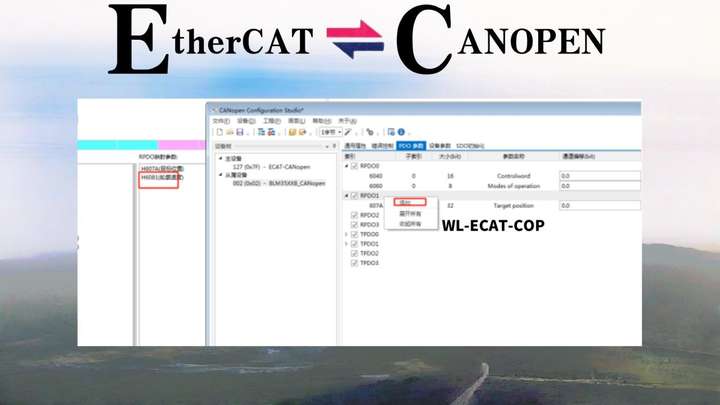
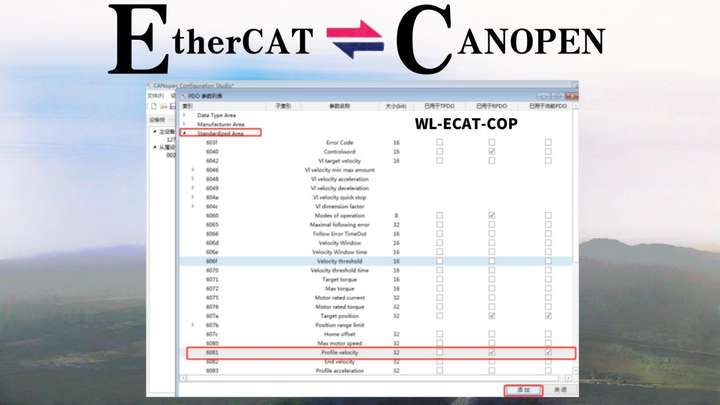
找到对应的PDO指令点选添加:
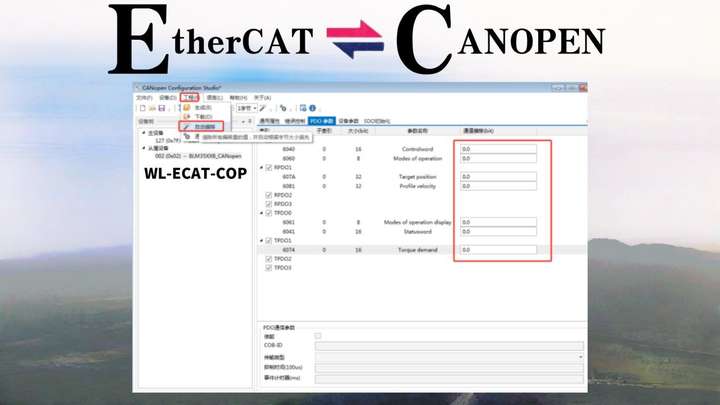
需要的指令添加完成以后打开工程点选自动偏移:
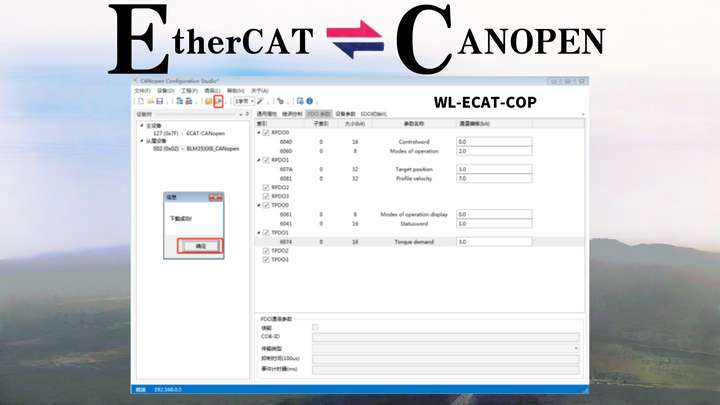
设置完成后点选生成:
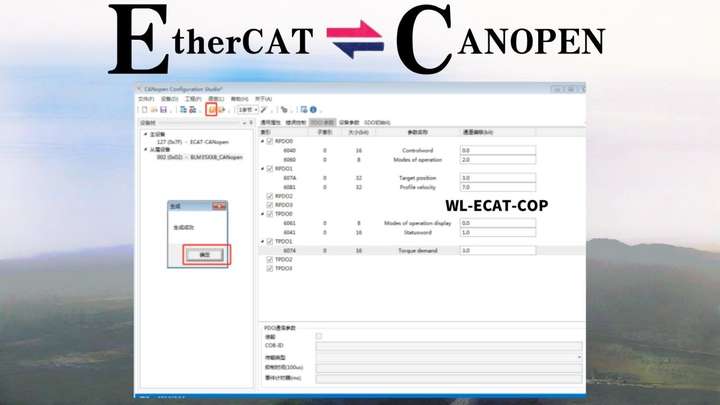
生成成功后点选下载:
通过以上在配置软件上对 EtherCAT 转 CANopen 网关与伺服器的配置步骤,可实现基于不同协议的设备高效通信与协同工作。在配置过程中,需严格按照步骤顺序进行,确保各参数设置准确无误,尤其要注意网关与伺服驱动器之间通信参数的一致性,如节点 ID、波特率等。同时,在完成初步配置后,还需进行全面的调试与优化工作,根据实际运行情况对相关参数进行微调,以达到最佳的控制效果和系统性能,满足工业自动化生产的高精度、高可靠性要求 。