ROS 2 中的 robot_state_publisher 和 joint_state_publisher 详解
文章目录
- 总体简介
- 🧩 1 . joint_state_publisher - 关节状态发布器
- 📌 核心功能
- ⚙️ 工作原理
- 🧠 主要任务
- 💻 基本用法
- 🧩 2. robot_state_publisher - 机器人状态发布器
- 📌 核心功能
- ⚙️ 工作原理
- 🧠 主要任务
- 📝 关键配置参数
- 🔄 3. 两者协作关系
- 🧩 典型系统工作流
总体简介
这两个组件是 ROS 2 中机器人状态管理的关键部分,共同协作处理机器人关节状态和坐标变换系统(TF)。
🧩 1 . joint_state_publisher - 关节状态发布器
📌 核心功能
收集并发布机器人的关节状态消息
提供图形界面(GUI)交互式控制关节位置(通过joint_state_publisher_gui)
⚙️ 工作原理
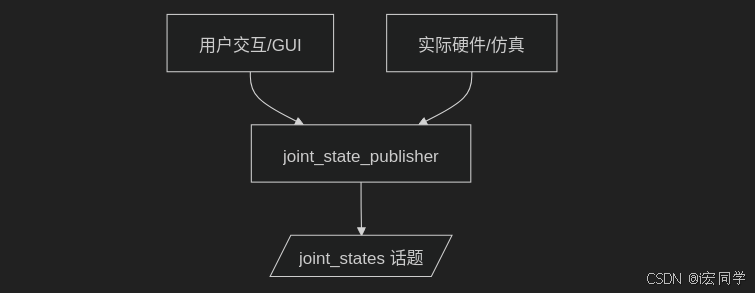
🧠 主要任务
收集关节状态:从不同来源(硬件驱动、仿真、GUI)获取关节位置信息
发布标准化消息:发布 sensor_msgs/msg/JointState 类型消息
提供交互界面:通过 GUI 控制机器人关节(特别适合演示和调试)
💻 基本用法
Node(package='joint_state_publisher',executable='joint_state_publisher', # 无 GUI 版本name='joint_state_publisher'
)
🎮 GUI 版本(交互式控制)
Node(package='joint_state_publisher_gui',executable='joint_state_publisher_gui',name='joint_state_publisher_gui'
)
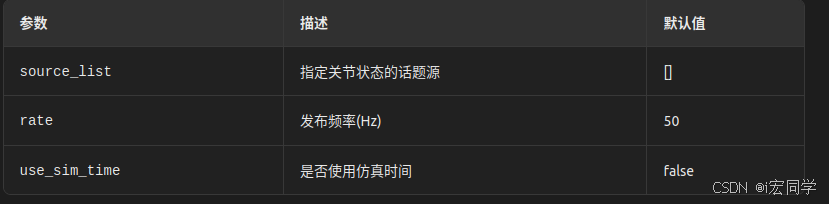
📝 关键配置参数
🧩 2. robot_state_publisher - 机器人状态发布器
📌 核心功能
根据关节状态和机器人描述(URDF)计算TF变换
维护整个机器人的坐标系系统
为 Rviz 和其他组件提供准确的坐标变换
⚙️ 工作原理
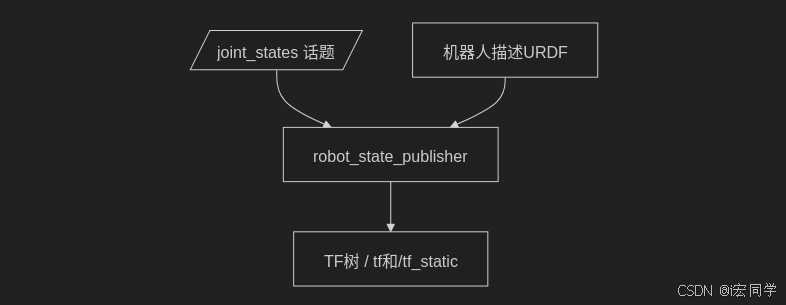
🧠 主要任务
解析 URDF:加载机器人模型描述
计算运动学:根据关节状态计算各部件位姿
发布 TF 变换:维护整个机器人的坐标系树
静态 TF 处理:发布固定关节的静态变换
📝 关键配置参数

🔄 3. 两者协作关系
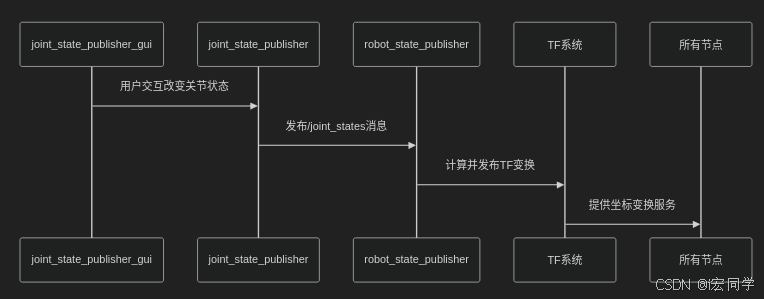
🧩 典型系统工作流
joint_state_publisher 收集或生成关节状态
发布 /joint_states 消息
robot_state_publisher 订阅 /joint_states
结合 URDF 模型计算坐标变换
发布到 TF 系统供所有组件使用
使用gazebo仿真的时候不需要提供joint_state_publisher 仿真环境提供