Guard Trace 值得吗?
根据定义, guard trace 是 aggressor line 和 victim line 之间的 trace 路由共面。关于是否在高速数字和混合信号应用中使用保护走线来减少从干扰源传输线耦合到受干扰传输线的噪声,一直存在争论。
争论的一方是,保护走线应沿其长度以固定的间隔短接到地,使用间隔在攻击者信号最高频率分量波长的 1/10 处的拼接过孔。通过这样做,人们相信守卫痕迹将充当攻击者和受害者痕迹之间的盾牌。
另一方面,仅将受害迹线与攻击者分开至少三倍线宽就足够了。这里的原因是,无论如何,crosstalk 会随着 spacing 的增加而迅速消失,并且通过添加 guard trace,您将至少有三倍的 trace separation来适应它。
在我与 Eric Bogatin 合著的题为“Dramatic Noise Reduction using Guard Traces with Optimized Shorting Vias”的 DesignCon2013 论文中,我们展示了有时保护迹线有效,有时则无效;取决于 Guard 跟踪的终止方式。通过正确管理保护走线的末端,我们证明它可以将受害线路上的耦合噪声降低一个数量级,而不是没有保护走线。但是,如果保护走线没有优化,则使用保护走线时,受害线路上的噪声也可能比没有保护走线时更大。
使用电路模型进行分析
我们从为所研究的拓扑构建电路模型开始研究。安捷伦的 EEsof EDS ADS 软件专门用于对带状线和微带线配置进行建模和仿真。带有保护走线的通用电路模型如图 1 的上半部分所示。没有 guard trace 的 circuit model 显示在下半部分。
为了进行分析,我们使用了无损传输线模型。guard 走线长度与 coupled length 完全匹配。保护走线上的接地拼接和端接电阻可以根据需要停用和/或短路。线宽空间几何图形设置为 5-5-5 mils,非保护拓扑的间距设置为线宽的三倍。
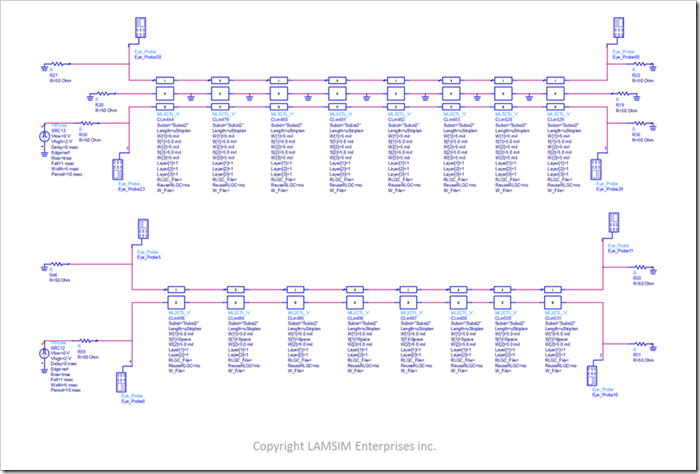
图 1 具有保护走线(顶部)和没有保护走线(底部)的通用拓扑的 ADS 原理图。传输线被分割和参数化,以便根据需要轻松更改长度。顶部原理图中所示的接地拼接和端接电阻器可以根据需要停用和/或短路。
图 2 是保护走线在特性阻抗中端接、保持开路或两端对地短路时的结果摘要。红色波形是没有保护走线的拓扑的结果,蓝色波形是有保护走线的结果。
根据端接的性质,保护走线上的再感染噪声可以增加或减少受干扰线路上的直接耦合噪声。这通常使受害者线路上的净噪声比没有防护跟踪更糟糕。
与简单的两线耦合模型不同,在双线耦合模型中,近端串扰 (NEXT) 和远端串扰 (FEXT) 可以很容易地从 RLGC 矩阵元素中预测出来,而尝试预测三线耦合模型的相同情况则更加困难。手动跟踪保护跟踪上诱发的所有噪声,并将其再次感染到受害者线路上,这是非常乏味的。首先,您必须从保护走线上的电压中识别受影响线路上直接耦合的再感染后向和前向噪声。然后问题是跟踪 guard trace 上 noise 的多次反射。因此,分析效果的唯一真正方法是通过电路建模和仿真。
如您所见,在微带拓扑中,添加保护走线几乎没有好处;无论端点如何终止。这是因为微带拓扑结构本身就容易出现远端串扰。因此,任何耦合到保护跟踪上的远端噪声随后都会用额外的远端噪声再次感染受害者;从叠加在蓝色波形上的附加振铃可以看出。
在带状线拓扑中,如果没有保护走线,则不会产生远端串扰。但是,当添加 guard trace 时,根据两端的终止方式,guard trace 上的任何近端耦合噪声都可能重新感染受害者。只有当两端对地短路时,我们才能看到近端和远端噪声的显著降低。
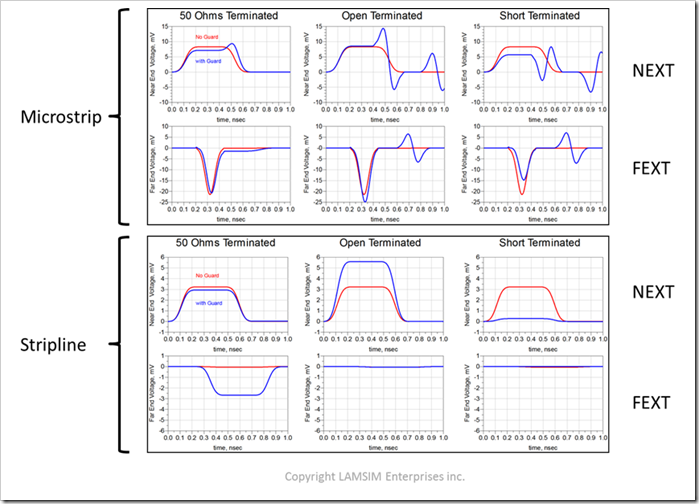
图 2 对于微带线和带状线几何形状,当保护走线的末端端接、保持开路或对地短路时的仿真结果摘要。
分布式短路过孔
在实际实施保护走线时,为了充当屏蔽层,粗略的经验法则建议短接过孔的间距至少应为信号最高频率成分波长的 1/10。对于 100 psec 的上升时间,为了满足 l/10 的间距,通过间距的拼接为 0.18 英寸;或 9 个 1.5 英寸以上的缝合孔。
图 3 总结了在多个波长上将保护走线拼接到地时的结果;与《无守卫》的情况相比。如您所见,在微带线的情况下,当保护走线短路少于 9 个过孔时,保护走线上仍然存在相当大的振铃噪声,这可能会再次感染受害线路。但是在带状线的情况下,每端有两个短路过孔,或者最多 9 个短接过孔的任意数量具有相同的结果。这表明除了在保护走线的末端之外,不需要多个短路过孔;只要 guard trace 的长度与 coupled length 相同。这极大地简化了带状线中保护走线的使用。
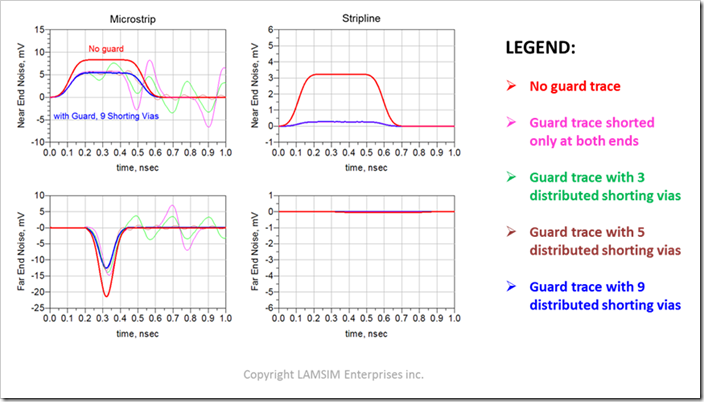
图 3 微带线和带状线几何形状的保护走线拼接的仿真结果总结。
实际设计注意事项
到目前为止,我们已经建模和模拟了将保护线短接到地的理想情况。但实际上,还有其他实际设计注意事项需要考虑。首先是通孔尺寸,以及它对线间距的影响。接下来是有限过孔电感;因为它的阻抗会阻止完全抑制 guard 走线上的噪声。最后,与 coupled length 相比,guard trace 的 extension 。
由于通孔制造设计规则限制了最小的过孔和捕获焊盘,因此大多数 PCB 供应商规格的最小机械钻孔尺寸为 8 mils。当您考虑最小焊盘直径和焊盘到铜的间距时,干扰源线和受干扰线之间的最小间距必须至少为 28 mils,如图 4 所示;只是为了在其长度上安装带有接地过孔的 guard 走线。
在这一点上,你必须问问自己这是否值得;特别适用于微带拓扑。如果两条信号线增加到 28 mils,那么仅通过增加的间隔减少串扰可能比增加短路保护走线更显着。
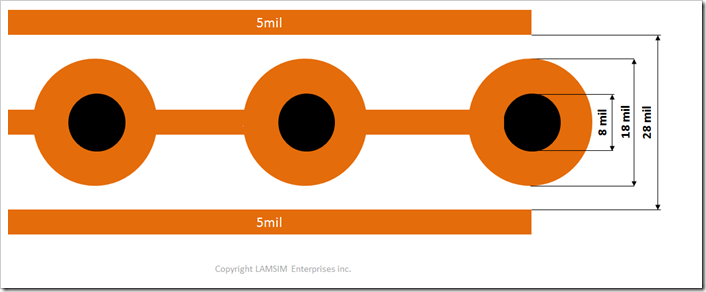
图 4 适合 8 mil 钻孔通孔和焊盘技术的最小走线间距。
幸运的是,电路分析表明,在微带拓扑结构中添加保护走线几乎没有什么好处,即使它经过适当的接地拼接也是如此。但是,要显著减少带状线中的串扰,只需在每一端短接保护走线,并确保保护走线的长度与耦合长度完全相同。这意味着容纳 via 和 guard 走线的最小空间可以保持为线宽的三倍;只要保护走线略微延长,如图 5(a) 所示。或者,保护走线可以等于耦合长度,如图 5(b) 所示。
安捷伦的 ADS Momentum 平面 3D 场求解器用于探索和量化过孔和保护走线长度对噪声再感染的影响。图 5 详细介绍了相应拓扑左端的 3D 模型的一部分。右侧是相同的。为清楚起见,不显示参考平面。
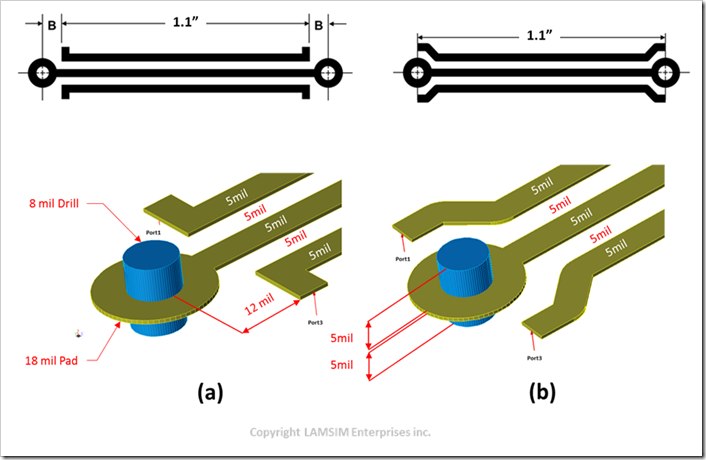
图 5 添加最小间距为 3 x 线宽的接地保护走线的两个示例。图 (a):保护走线在两侧按尺寸 B 延伸到耦合长度 (A) 之外,以满足最小 5 mil 焊盘走线间距要求。图 (b): 通过分离两端的走线,保护走线等于耦合长度。在 Agilent Momentum 3D 场求解器中建模。为清楚起见,不显示参考平面。
仿真后,S 参数数据以 Touchstone 格式保存,并导入 ADS 进行瞬态仿真分析和比较。图 6 显示了结果。左侧的图使用 100 psec 的阶跃边缘上升时间,而右侧的图使用 50 psec。这两个图都与图 2 中观察到的显著降噪一致,不同之处在于我们在大约 0.8 ns 后看到一些额外的噪声纹波。
在 100 psec 上升时间时,(a) 或 (b) 拓扑的近端噪声特征实际上没有差异。但是当上升时间减少到 50 psec 时,噪声纹波更加明显。蓝色波形显示,即使维度 B 为 0 mils,由于到参考平面的过孔的感应长度,仍然存在少量噪声。红色波形显示,仅将保护走线长度增加 12 mils,两端的纹波幅度几乎翻了一番。
众所周知,随着时间的推移,技术进步会导致越来越快的上升时间。如果您根据当时的技术设计了您的设计,那么未来任何具有更快上升时间的零件替代品都可能导致您的产品出现故障,或者更糟糕的是,是间歇性的。
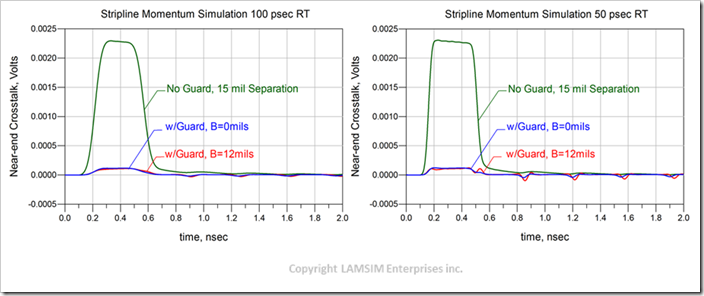
图 6 当攻击者电压施加到端口 3 时,比较端口 1 处近端串扰的动量瞬态仿真结果。红色和蓝色波形带有保护走线。绿色波形没有保护,间隔为 15 mil。攻击者电压 = 1V,100 psec 上升时间(左)和 50 psec 上升时间(右)..
为了探索这种现象,保护走线在两端分别变化了 50 和 100 mils,如图 7 所示。在这里我们可以看到,随着保护走线在两端变长,噪声纹波的幅度增长得相当快。值得注意的是,当保护走线仅长 100 mil 时,在每一端,噪声的峰峰值幅度几乎等于无保护情况下的峰值幅度。
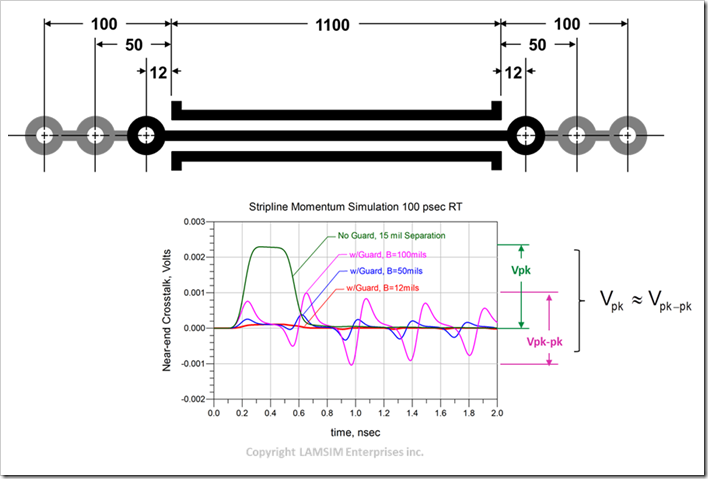
图 7 保护走线延长的动量瞬态仿真结果。B = 12 mils(红色),B = 50 mils(蓝色)和 B = 100 mils(品红色),而无防护罩(绿色)。干扰器电压 = 1V,100 psec 上升时间。尺寸(以密耳为单位)。
当移除保护走线,并将空间增加到线宽的五倍时,近端串扰的幅度减小,大约等于保护走线情况,如图 8 所示。此外,由于没有保护走线,因此没有额外的噪声纹波。
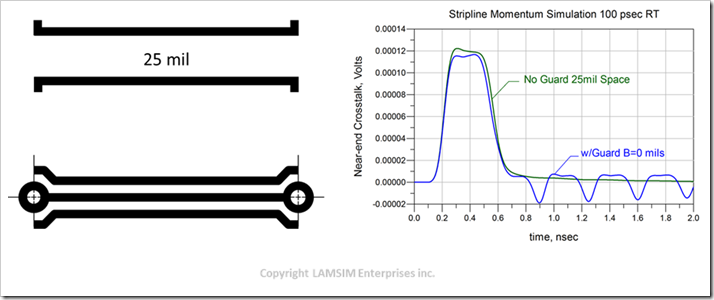
图 8 当攻击者电压施加到端口 3 时,比较端口 1 处近端串扰的动量瞬态仿真结果。干扰器电压 = 1V,100 psec 上升时间。
所以回到最初的问题,“守卫痕迹值得吗?你来评判。如果需要隔离,使用两端短路的 guard trace 可能是有效的。但它确实有警告。如果您决定走这条路,则必须在签署设计之前对拓扑进行建模和仿真,最好使用 3D 场求解器。