CAN 介绍
CAN总线简介

硬件电路

CAN 电平标准

CAN 收发器

CAN物理层作用

数据帧


遥控帧

CAN 5种类型帧

位填充

波形实例


接收方数据采样

接收方采样遇到的问题

接收方位时序

硬同步

再同步

波特率计算

资源分配规则

STM32 CAN外设介绍


CAN基本结构

发送过程

接收过程

标识符过滤器


测试模式

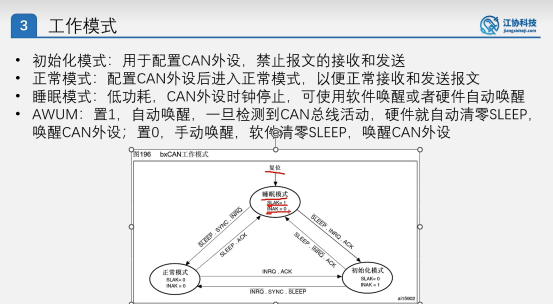
工作模式
初始化配置代码
/**
* @brief CAN初始化
* @param tsjw : 重新同步跳跃时间单元.范围: 1~3;
* @param tbs2 : 时间段2的时间单元.范围: 1~8;
* @param tbs1 : 时间段1的时间单元.范围: 1~16;
* @param brp : 波特率分频器.范围: 1~1024;
* @note 以上4个参数, 在函数内部会减1, 所以, 任何一个参数都不能等于0
* CAN挂在APB1上面, 其输入时钟频率为 Fpclk1 = PCLK1 = 36Mhz
* tq = brp * tpclk1;
* 波特率 = Fpclk1 / ((tbs1 + tbs2 + 1) * brp);
* 我们设置 can_init(1, 8, 9, 4, 1), 则CAN波特率为:
* 36M / ((8 + 9 + 1) * 4) = 500Kbps
*
* @param mode : CAN_MODE_NORMAL, 正常模式;
CAN_MODE_LOOPBACK,回环模式;
* @retval 0, 初始化成功; 其他, 初始化失败;
*/
uint8_t can_init(uint32_t tsjw, uint32_t tbs2, uint32_t tbs1, uint16_t brp, uint32_t mode)
{
g_canx_handler.Instance = CAN1;
g_canx_handler.Init.Prescaler = brp; /* 分频系数(Fdiv)为brp+1 */
g_canx_handler.Init.Mode = mode; /* 模式设置 */
g_canx_handler.Init.SyncJumpWidth = tsjw; /* 重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1TQ~CAN_SJW_4TQ */
g_canx_handler.Init.TimeSeg1 = tbs1; /* tbs1范围CAN_BS1_1TQ~CAN_BS1_16TQ */
g_canx_handler.Init.TimeSeg2 = tbs2; /* tbs2范围CAN_BS2_1TQ~CAN_BS2_8TQ */
g_canx_handler.Init.TimeTriggeredMode = DISABLE; /* 非时间触发通信模式 */
g_canx_handler.Init.AutoBusOff = DISABLE; /* 软件自动离线管理 */
g_canx_handler.Init.AutoWakeUp = DISABLE; /* 睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位) */
g_canx_handler.Init.AutoRetransmission = ENABLE; /* 禁止报文自动传送 */
g_canx_handler.Init.ReceiveFifoLocked = DISABLE; /* 报文不锁定,新的覆盖旧的 */
g_canx_handler.Init.TransmitFifoPriority = DISABLE; /* 优先级由报文标识符决定 */
if (HAL_CAN_Init(&g_canx_handler) != HAL_OK)
{
return 1;
}
#if CAN_RX0_INT_ENABLE
/* 使用中断接收 */
__HAL_CAN_ENABLE_IT(&g_canx_handler, CAN_IT_RX_FIFO0_MSG_PENDING); /* FIFO0消息挂号中断允许 */
HAL_NVIC_EnableIRQ(USB_LP_CAN1_RX0_IRQn); /* 使能CAN中断 */
HAL_NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 1, 0); /* 抢占优先级1,子优先级0 */
#endif
CAN_FilterTypeDef sFilterConfig;
/*配置CAN过滤器*/
sFilterConfig.FilterBank = 0; /* 过滤器0 */
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; /* 标识符屏蔽位模式 */
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; /* 长度32位位宽*/
sFilterConfig.FilterIdHigh = 0x0000; /* 32位ID */
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000; /* 32位MASK */
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_FILTER_FIFO0; /* 过滤器0关联到FIFO0 */
sFilterConfig.FilterActivation = CAN_FILTER_ENABLE; /* 激活滤波器0 */
sFilterConfig.SlaveStartFilterBank = 14;
/* 过滤器配置 */
if (HAL_CAN_ConfigFilter(&g_canx_handler, &sFilterConfig) != HAL_OK)
{
return 2;
}
/* 启动CAN外围设备 */
if (HAL_CAN_Start(&g_canx_handler) != HAL_OK)
{
return 3;
}
return 0;
}
/**
* @brief CAN底层驱动,引脚配置,时钟配置,中断配置
此函数会被HAL_CAN_Init()调用
* @param hcan:CAN句柄
* @retval 无
*/
void HAL_CAN_MspInit(CAN_HandleTypeDef *hcan)
{
if (CAN1 == hcan->Instance)
{
CAN_RX_GPIO_CLK_ENABLE(); /* CAN_RX脚时钟使能 */
CAN_TX_GPIO_CLK_ENABLE(); /* CAN_TX脚时钟使能 */
__HAL_RCC_CAN1_CLK_ENABLE(); /* 使能CAN1时钟 */
GPIO_InitTypeDef gpio_initure;
gpio_initure.Pin = CAN_TX_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_AF_PP;
gpio_initure.Pull = GPIO_PULLUP;
gpio_initure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(CAN_TX_GPIO_PORT, &gpio_initure); /* CAN_TX脚 模式设置 */
gpio_initure.Pin = CAN_RX_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_AF_INPUT;
HAL_GPIO_Init(CAN_RX_GPIO_PORT, &gpio_initure); /* CAN_RX脚 必须设置成输入模式 */
}
}