人形机器人——非接触式传感技术
灵巧手
一、技术种类与工作原理
非接触式传感技术种类繁多,依据感知原理主要可分为以下几类:

非接触式传感技术种类
除了表格中列出的,还有一些值得一提的技术:
立体视觉与多目视觉:通过多个相机从不同角度拍摄同一场景,利用视差原理计算深度信息,获取三维信息。
结构光技术:通过将特定的光斑或条纹图案投射到物体表面,并利用相机捕捉图案的变形,从而计算出物体的三维形状。
ToF(飞行时间)相机:通过测量光脉冲从发射到反射回来的飞行时间来计算距离,快速获取深度图像。

机械仿生的壁虎
二、应用现状
非接触式传感技术在人形机器人中发挥着“眼睛”和“预感”的作用,其应用贯穿于环境感知、定位导航、交互操作等方方面面。
1. 环境感知与三维重建:
人形机器人依赖激光雷达、立体视觉等技术获取周围环境的三维点云数据,并构建地图(如Occupancy Grid Map)。例如,中国科学院合肥物质科学研究院的研究团队为“龙机器人”(Loong Pro)开发了基于相机和激光雷达感知的3D空间占据栅格映射与导航技术,使其能在复杂的室内外环境中实现厘米级定位和动态避障。
2. 障碍物检测与避障:
这是非接触式传感最核心的应用。超声波传感器和低成本红外接近觉传感器通常用于近距离、低成本的简单避障。毫米波雷达因其良好的环境适应性(如穿透灰尘、雨雪),常用于室外机器人的运动物体检测。激光雷达则能提供更精确的周围环境轮廓扫描。
3. 手势识别与人机交互:
通过摄像头(计算机视觉) 或毫米波雷达,机器人可以识别人的手势动作,从而实现非接触式的隔空操控。电容式传感也能在极近距离实现精细的手势识别。
4. 灵巧操作与触觉反馈:
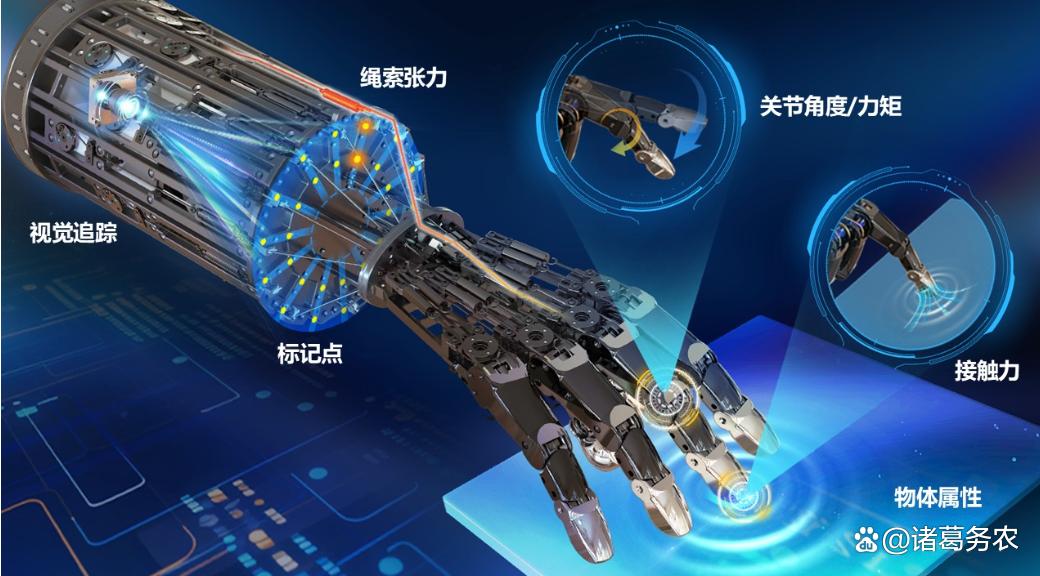
这是当前的研究前沿。例如,基于视觉的触觉传感提供了新的思路。哈工大魏承教授团队研发的多模态绳驱灵巧手,仅利用一个单目相机就能实现整手的力-位-触多模态感知,无需安装传统的位置或力传感器,既能感知指尖的接触力和物体的柔软度,也能重建物体的轮廓形状。
日本的JAIST研究团队开发的ProTac柔性传感皮肤,其核心是一层聚合物分散液晶(PDLC),可通过电压在透明和 opaque 状态间切换。透明状态下,内置相机可“看穿”皮肤探测附近物体(接近觉);不透明状态下,同一相机则通过追踪皮肤变形来感知触摸和压力(触觉)。这种双模式感知用一个简单结构实现了大面积、多模态的感知。
5. 高精度定位与导航:
融合激光雷达SLAM(同步定位与地图构建)、视觉惯性里程计(VIO) 以及GPS(室外) 等多种传感器数据,人形机器人可以实现精准的自主移动和定点操作。

All-muscle humanoid ALLEX
三、优势与不足
1. 优势
安全性高:允许机器人在物理接触发生前就感知到人或物体,并提前做出减速、停止或绕行等决策,极大提升了人机协作的安全性和机器人本体的防碰撞能力。
无接触磨损:由于不与被测物体发生物理接触,因此不存在因接触而产生的磨损、机械损伤或污染等问题,寿命更长,可靠性更高,特别适用于洁净环境(如半导体、医疗)。
响应速度快:光、电、磁信号的传播速度极快,使得非接触式传感能够实现高速、实时的检测和响应,满足机器人动态操作的需求。
丰富的信息感知:尤其是视觉传感器,能够获取海量的纹理、颜色、形状、深度等信息,为复杂的认知和决策提供数据基础。
2. 不足与挑战
环境干扰:光学传感器(视觉、激光雷达) 易受光照变化、雾霾、雨雪等恶劣天气的影响。超声波传感器易受温度、气流干扰。毫米波雷达虽适应性较强,但也可能受到电磁干扰。
计算复杂度高:处理图像和点云数据需要强大的计算资源和高效的算法,这对机器人的嵌入式系统提出了挑战,并可能带来功耗和成本的上升。
精度与成本的平衡:高精度的传感器(如高性能激光雷达、高速相机)成本昂贵,而低成本传感器往往在精度、分辨率或可靠性上存在妥协。
“边缘”场景的局限性:对于透明物体(如玻璃)、极高反射率物体(镜面)、极度黑体或与背景颜色相近的物体,某些光学传感器可能会失效或检测精度下降。
隐私担忧:特别是在家庭等私人场景中,持续工作的摄像头可能会引发关于数据安全和个人隐私的担忧。
OmniHead的RGB-D深度视觉系统
四、前沿技术进展
人形机器人非接触式传感技术的前沿进展,主要体现在生物仿生、多模态融合、人工智能赋能以及新型材料与结构创新上。
1. 生物仿生传感:
受蝎子感知机制的启发,吉林大学的研究团队开发了一种仿生压阻压力传感器(BPPS)。它模仿了蝎子的刚毛和裂缝感官系统,通过“应力陷阱”结构增强对微小压力的敏感性,同时利用“挠曲抑制单元”来扩展其线性测量范围并减少机械噪声。这种设计解决了传统压力传感器在灵敏度和测量范围之间难以兼得的权衡问题,让机器人能同时感知细微的气流变化和较大的压力8。
2. 多模态融合与混合传感:
单一类型的传感器存在局限,融合多种传感器数据成为必然趋势。例如,为机器人灵巧手设计电容式与压阻式混合的电子皮肤正成为主流方案。特斯拉在其人形机器人Gen 3中,就采用了指尖使用MEMS电容式、手掌使用薄膜压阻式的混合方案4。这种组合既能利用电容式传感器测量多维力的优势,实现更精确的触觉力和滑动判断,又能通过压阻式传感器提供冗余和互补,在电容传感器受环境干扰时保持基础感知能力。
3. AI赋能于感知算法:
AI,特别是深度学习,极大地提升了非接触式传感数据的处理和理解能力。
4. 视觉触觉传感器:
如深圳Daimon Robotics公司开发的高分辨率视觉触觉传感器,每平方厘米拥有40,000个传感单元。结合深度学习算法,它能从捕获的细微皮肤变形图像中提取丰富的触觉信息,包括纹理、刚度、滑动、压力剪切力等。公司称,其技术能将训练操作模型所需的数据量减少到千分之一。
5. 3D语义占据网络:
这是环境感知的前沿方向。通过融合视觉语义信息与空间几何信息,算法不仅能推断出环境中每个体素(三维像素)的几何占用情况,还能知其语义类别(是车、人、还是建筑)。这使得机器人对环境的理解从“哪里能走”升级到“哪里有什么,以及它们是什么”。
6. 材料与结构创新:
JAIST的ProTac系统利用聚合物分散液晶(PDLC) 材料实现了一 skin 两用(接近觉与触觉)。哈工大的灵巧手则通过创新的机械结构设计(绳驱+视觉),从根本上避免了在手指上集成大量微型传感器的复杂性和高成本,实现了低成本、高可靠性的多模态感知。
红外LED助机器人在无传感器下获得触觉反馈
五、主要供应商与研发机构
人形机器人的非接触式传感技术生态包含老牌供应商、新兴科技公司和前沿研究机构。
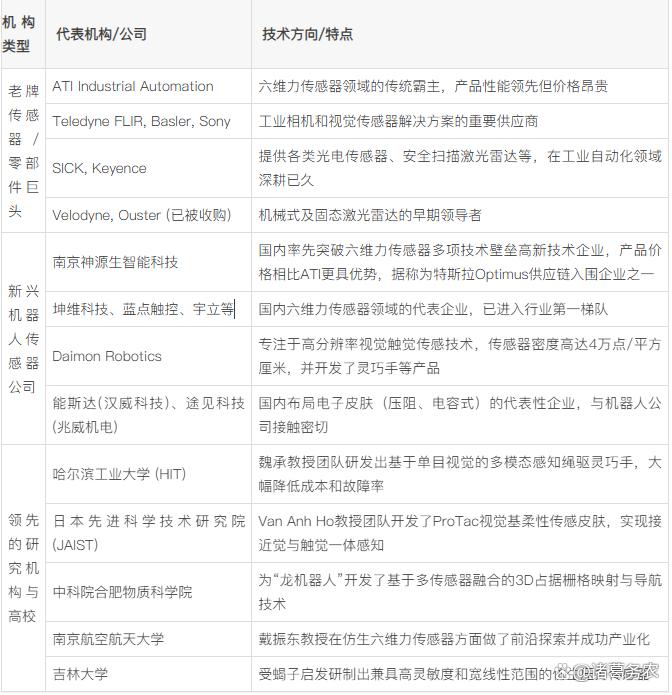
人形机器人的非接触式传感技术主要机构
六、总结与展望
非接触式传感技术是人形机器人从“功能机”迈向“智能机”、从实验室走入现实世界的核心使能技术之一。目前的发展呈现出以下几个清晰趋势:
融合化与智能化:多模态传感器融合结合AI算法将是解决复杂环境下感知难题的唯一路径。未来的竞争不仅是硬件的竞争,更是软件算法和系统集成能力的竞争。
低成本与高可靠性:量产应用必须考虑成本。无论是通过创新的结构设计(如哈工大灵巧手)还是通过先进的工艺降低传统传感器成本,抑或是通过算法弥补硬件短板,高性价比、高可靠性的解决方案将成为市场主流。
仿生学与新材料驱动创新:从蝎子到壁虎,大自然仍是灵感的宝贵源泉。新型功能材料(如PDLC)、柔性电子和MEMS工艺将继续推动传感器向微型化、柔性化、高性能化发展。
标准化与开源化:像JAIST开源ProTac设计这样的做法,有利于加速整个领域的技术扩散和迭代。未来可能会出现更多软硬件接口的标准,以降低开发复杂度。

MIT通过触觉来移动的机器狗
【免责声明】本文主要内容均源自公开资料和信息,部分内容引用了Ai。仅作参考,不作任何依据,责任自负。