ubuntu20.04下使用D435i实时运行ORB-SLAM3
提前安装好ROS环境,这里采用的是小鱼老师的一行代码安装:
wget http://fishros.com/install -O fishros && bash fishros
提前运行跑通ORB-SLAM3,具体参考如下:
https://blog.csdn.net/2302_80099075/article/details/140306463?spm=1011.2415.3001.5331
目录
一、安装IntelRealSense SDK2.0
二、realsense-ros的安装
三、标定
四、ROS下运行orb-slam3
一、安装IntelRealSense SDK2.0
有的教程是通过命令行安装的,我按照这种方式,后面编译realsense-ros时一直会报错:
CMake Error at realsense-ros/realsense2_camera/cMakeLists.txt:47(message): Inter Realsense SDK 2.0 is missing, please install it from https://github.com/IntelRealsense/librealsense/releases
原因是:命令行安装的IntelRealSense SDK配置引用了ROS2的依赖,而安装的是ROS1 版本。所以编译会一直报错。
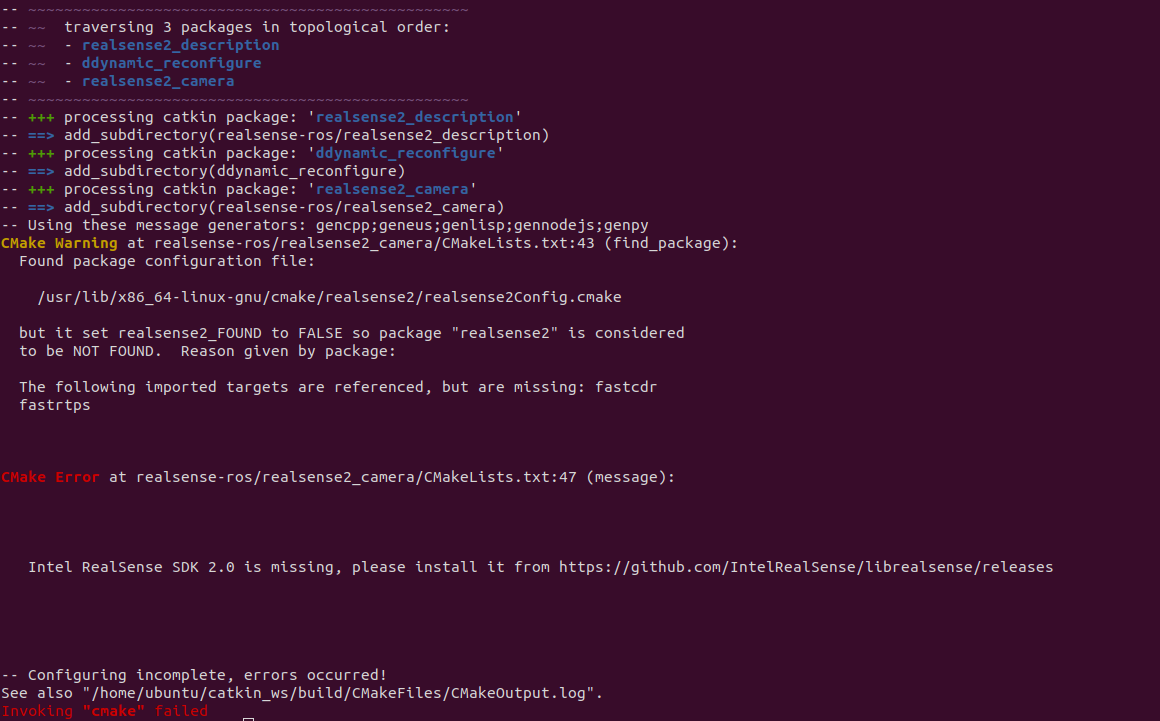
这里采用源码安装的方式。
终端执行以下命令下载源码,这里放在了主目录下:
git clone https://github.com/IntelRealSense/librealsense.gitlibrealsense目录下,终端执行以下命令,安装权限脚本:
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules
sudo udevadm trigger终端执行以下命令,安装依赖:
sudo apt-get install git libssl-dev libusb-1.0-0-dev libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-devibrealsense目录下,执行以下命令,编译与安装IntelRealSense SDK2.0:
mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release -DFORCE_RSUSB_BACKEND=false
make
sudo make install执行以下命令,查看是否安装成功:
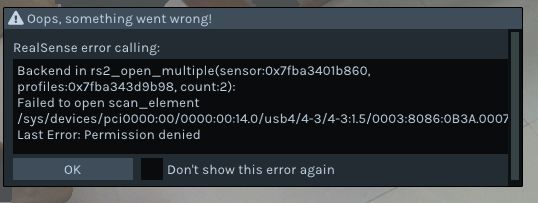
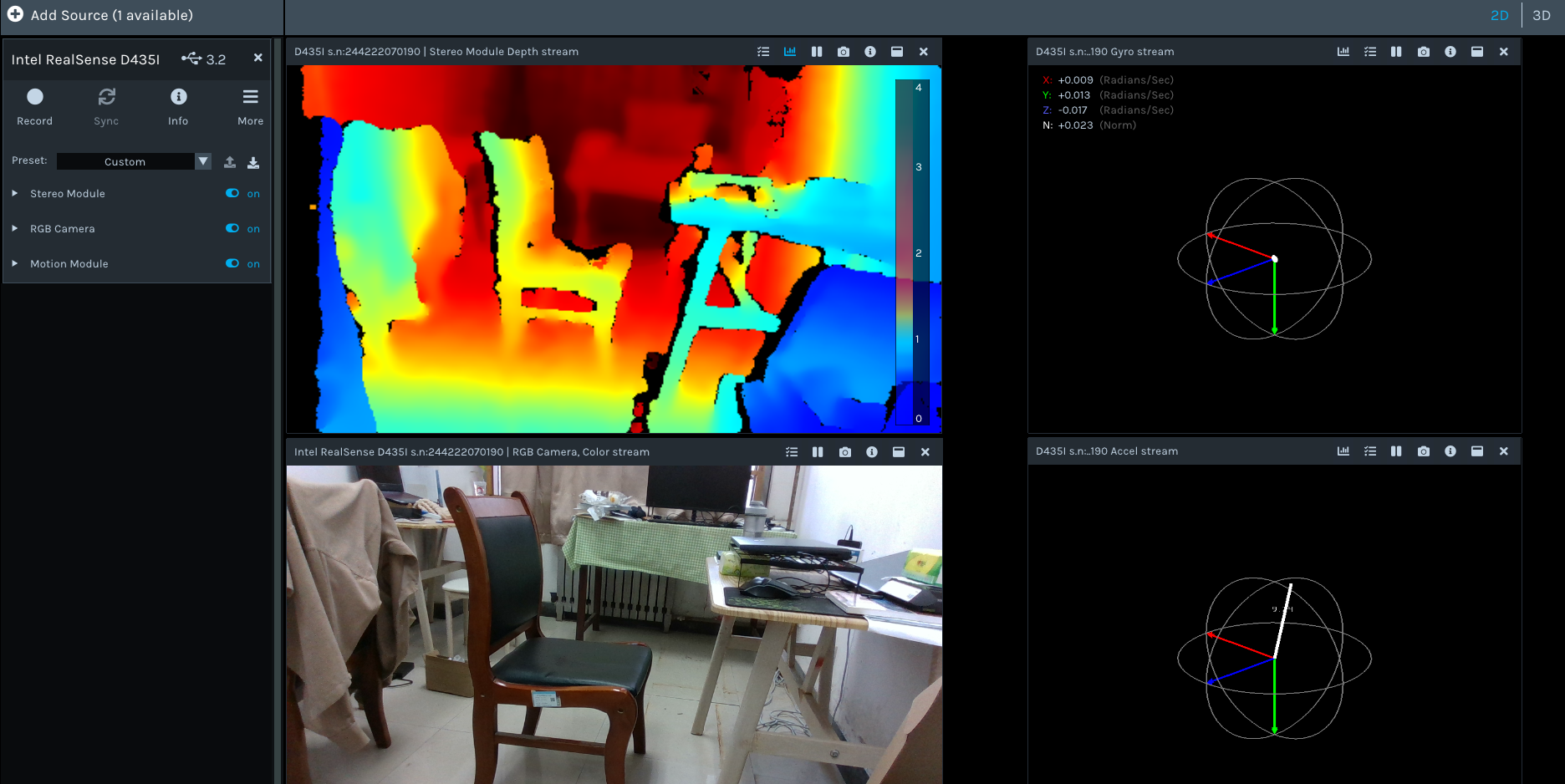
realsense-viewer
连接的接口应该是USB 3.0,不然可能会出现这个问题。
二、realsense-ros的安装
主目录下创建一个工作空间:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/克隆realsense-ros和ddynamic_reconfigure源码在catkin_ws/src/目录下:
git clone https://github.com/IntelRealSense/realsense-ros.git
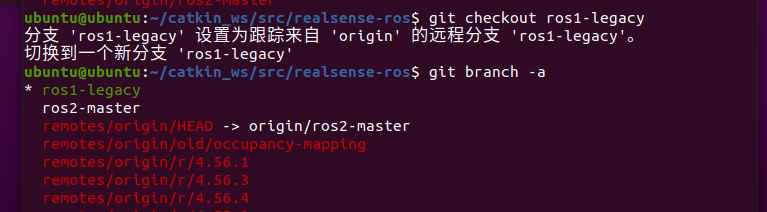
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git在realsense-ros目录下,查看分支:
git branch -a

当前分支在ros2-master下,而当前的系统是ros1,因此需要切换分支,执行以下命令,将分支切换至ros1-legacy:
git checkout ros1-legacy
回到catkin_ws目录下,编译安装realsense-ros:
catkin_make
catkin_make install
把工作空间的环境变量设置到bash环境中:
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrcsource ~/.bashrc终端执行如下命令启动相机:
roslaunch realsense2_camera rs_camera.launch
如果启动过程中,提示找不到包,手动执行下source ~/catkin_ws/devel/setup.bash
另一个终端启动rviz,看各话题的画面是不是正常显示:
在 RViz 中配置:
1、Fixed Frame: 设置为 camera_link
2、添加 Display:
-
点击左下角
Add -
选择
Camera→ 设置Image Topic为/camera/color/image_raw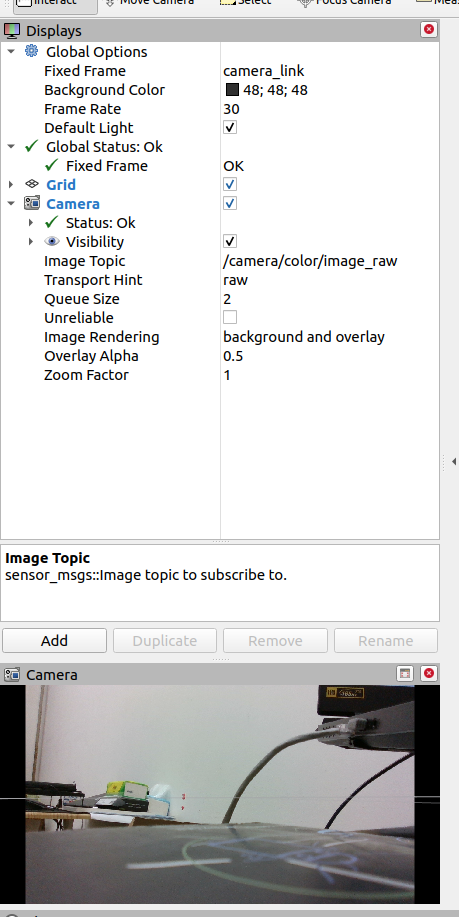
三、D435i 彩色相机内参标定
安装摄像头标定工具:
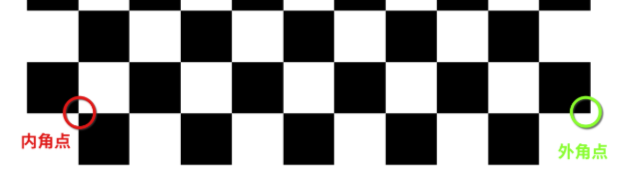
sudo apt-get install ros-noetic-camera-calibration通过以下链接,下载标定板:
https://docs.opencv.org/2.4/_downloads/pattern.png
在终端执行以下命令,启动摄像头:
roslaunch realsense2_camera rs_camera.launch打开一个新终端,执行以下命令:
rosrun camera_calibration cameracalibrator.py --size 9x6 --square 0.024 image:=/camera/color/image_raw camera:=/camera/color --no-service-check
–size 9x6 棋盘大小为 (9x6,仅计算内角)
–square 0.024 棋盘中的一个正方形大小,以米为单位
根据标定板实际情况修改。
运行起来界面如下:
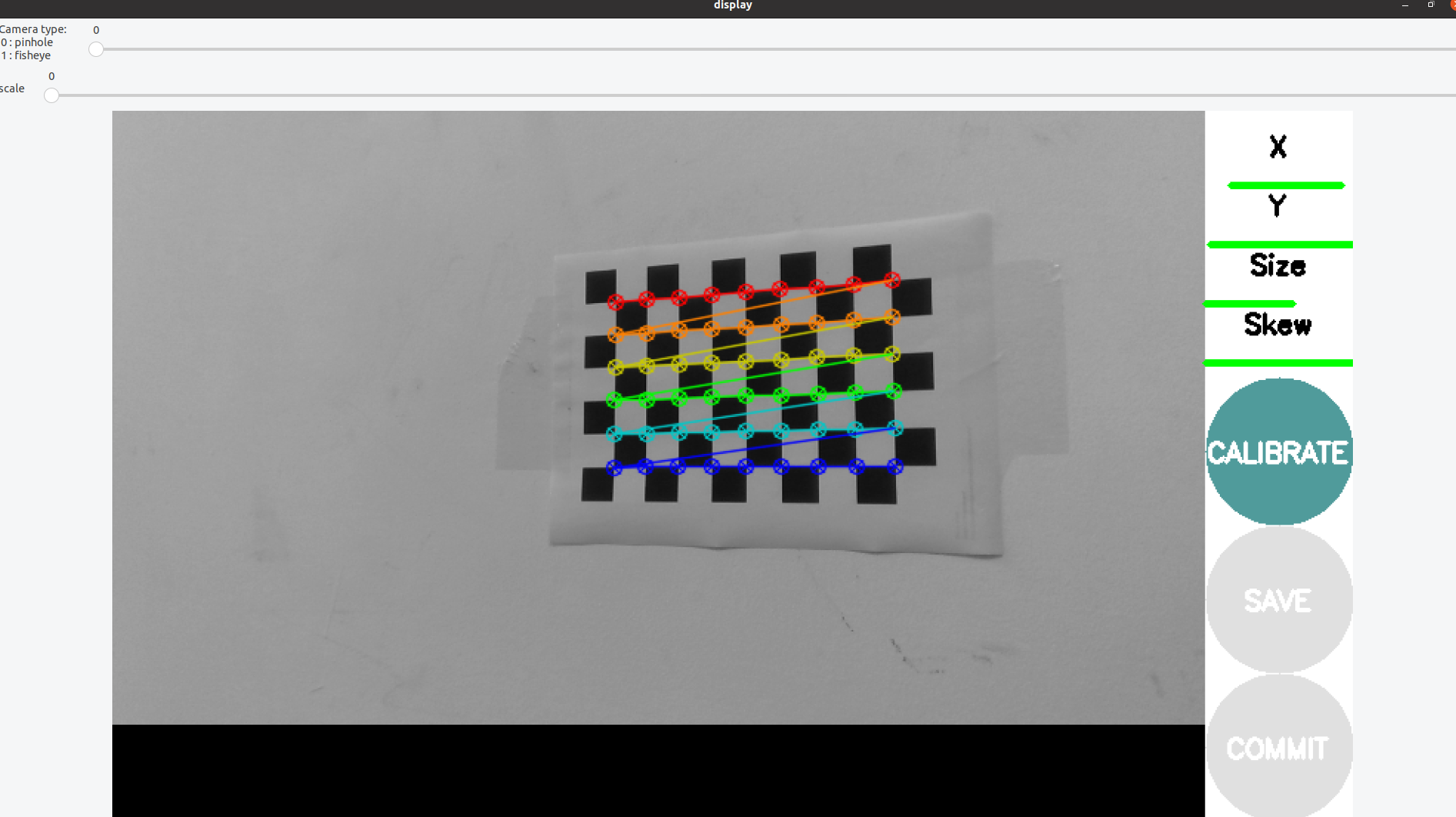
按照x(左右)、y(上下)、size(前后)、skew(倾斜)等方式移动相机,直到x,y,size,skew的进度条都变成绿色位置。接着按下CALIBRATE按钮,等一段时间就可以完成标定。完成后点击SAVE保存标定使用的图像以及标定结果,会显示保存地址,可以打开查看,然后再COMMIT退出程序,标定完成。点击"COMMIT"报错是正常的,因为RealSense相机节点不提供该服务。但这不影响标定结果的使用。只需保存标定参数并手动应用到ORB-SLAM3配置文件中即可。
标定文件在根目录/tmp/calibrationdata.tar.gz里,找到标定结果文件后,按照其数据修改Examples/ROS/ORB_SLAM3目录下Asus.yaml。
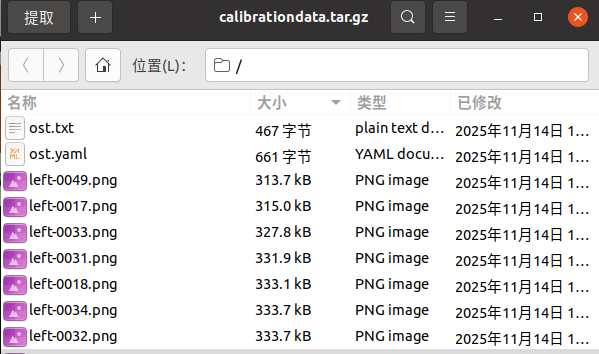
以下是我的标定文件ost.yaml里面的内容。
image_width: 1280 # 图像宽度(像素)
image_height: 720 # 图像高度(像素)
camera_name: narrow_stereo # 相机名称(通常用于立体相机)
camera_matrix: # 相机内参矩阵rows: 3cols: 3data: [899.36111, 0. , 649.57404, # fx, 0, cx 0. , 901.64597, 361.88024, # 0, fy, cy0. , 0. , 1. ] # 0, 0, 1distortion_model: plumb_bob # 畸变模型(Brown-Conrady模型)
distortion_coefficients: # 畸变系数rows: 1cols: 5 # [k1,k2,p1,p2,k3] data: [0.108620, -0.215185, 0.000762, -0.002215, 0.000000]
rectification_matrix: # 校正矩阵rows: 3cols: 3data: [1., 0., 0.,0., 1., 0.,0., 0., 1.]
projection_matrix: # 投影矩阵rows: 3cols: 4data: [898.53308, 0. , 646.8581 , 0. ,0. , 913.9599 , 361.79539, 0. ,0. , 0. , 1. , 0. ]根据标定文件ost.yaml修改Asus.yaml得到:
%YAML:1.0#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
Camera.type: "PinHole"# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 899.36111
Camera.fy: 901.64597
Camera.cx: 649.57404
Camera.cy: 361.88024Camera.k1: 0.108620
Camera.k2: -0.215185
Camera.p1: 0.000762
Camera.p2: -0.002215
Camera.k3: 0.000000 Camera.width: 1280
Camera.height: 720# Camera frames per second
Camera.fps: 30.0# IR projector baseline times fx (aprox.)
# bf = fx * baseline (baseline ≈ 0.05m)(D435i基线约为5cm)
Camera.bf: 44.9680555 # 899.36111 * 0.05# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1# Close/Far threshold. Baseline times.
ThDepth: 40.0# Deptmap values factor
#(RealSense深度值为毫米,需要转换为米)
DepthMapFactor: 1000.0#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
也可以不进行标定,直接用出厂标定的参数也可以。
roslaunch realsense2_camera rs_camera.launch 相机启动的情况下,终端执行以下命令,查看相机内参:
rostopic echo /camera/color/camera_info
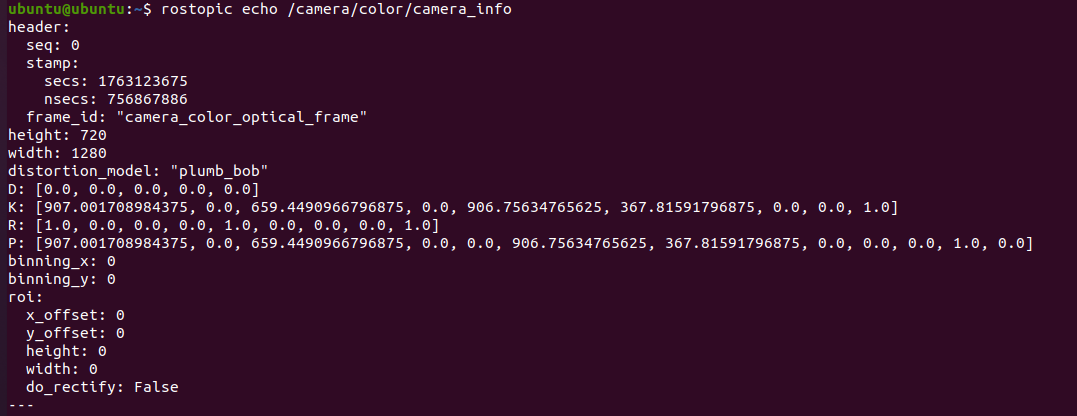
frame_id: "camera_color_optical_frame" # 坐标系名称
height: 720 # 图像高度(像素)
width: 1280 # 图像宽度(像素)
distortion_model: "plumb_bob" # 畸变模型(Brown-Conrady模型)
D: [0.0, 0.0, 0.0, 0.0, 0.0] # 畸变系数 [k1, k2, p1, p2, k3]
K: [907.001708984375, 0.0, 659.4490966796875, 0.0, 906.75634765625, 367.81591796875, 0.0, 0.0, 1.0]
K:[fx, 0, cx,0, fy, cy, # 相机内参矩阵0, 0, 1]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, # 旋转矩阵0.0, 0.0, 1.0]
P: [907.001708984375, 0.0, 659.4490966796875, 0.0, 0.0, 906.75634765625, 367.81591796875, 0.0, 0.0, 0.0, 1.0, 0.0] # 投影矩阵同样按照其数据修改Examples/ROS/ORB_SLAM3目录下Asus.yaml内容即可。
四、ROS下运行orb-slam3
将Examples_old下的ROS文件夹复制到Examples文件夹下。
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/ubuntu/catkin_ws/src/ORB_SLAM3/Examples/ROS将ORB_SLAM3/Examples/ROS/ORB_SLAM3/CMakeLists.txt文件进行如下修改:
把C++11改为C++14:


第2行增加如下代码:
project(ORB_SLAM3)第34行:
将find_package(OpenCV 3.0 QUIET)改为find_package(OpenCV 4.2 QUIET)第50行增加以下代码(在include_directories内):
${PROJECT_SOURCE_DIR}/../../../Thirdparty/Sophus将ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/AR下,ros_mono_ar.cc文件中的代码第151行进行修改:
cv::Mat Tcw = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec());改为:
cv::Mat Tcw=ORB_SLAM3::Converter::toCvMat(mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec()).matrix());将ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/AR下,ViewerAR.cc文件中的代码第405行和第530行进行修改:
vPoints.push_back(pMP->GetWorldPos());cv::Mat Xw = pMP->GetWorldPos();修改为:
vPoints.push_back(ORB_SLAM3::Converter::toCvMat(pMP->GetWorldPos()));cv::Mat Xw = ORB_SLAM3::Converter::toCvMat(pMP->GetWorldPos());安装一下rosdep。这里用小鱼老师的一键安装系列。执行以下代码:
wget http://fishros.com/install -O fishros && bash fishros
安装完后执行以下代码更新一下:
rosdepc update在ORB-SLAM3目录下打开终端,依次执行以下命令:
chmod +x build_ros.sh
./build_ros.sh编译成功如下:

ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_rgbd.cc里的第66,67行进行修改:
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 100);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 100);通过执行 rostopic list 查看相关话题:
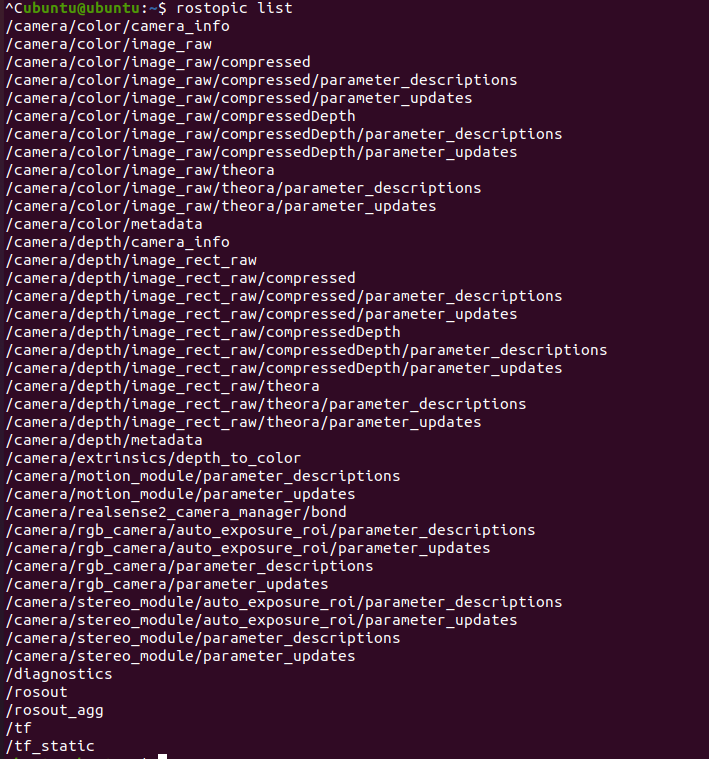
将订阅话题修改为上面出现的:
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/color/image_raw", 100);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/depth/image_rect_raw", 100);修改完后,重新编译即可。
打开终端执行以下命令:
roslaunch realsense2_camera rs_camera.launch另起一个终端执行以下命令:
rosrun ORB_SLAM3 RGBD Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM3/Asus.yaml
成功运行画面如下:
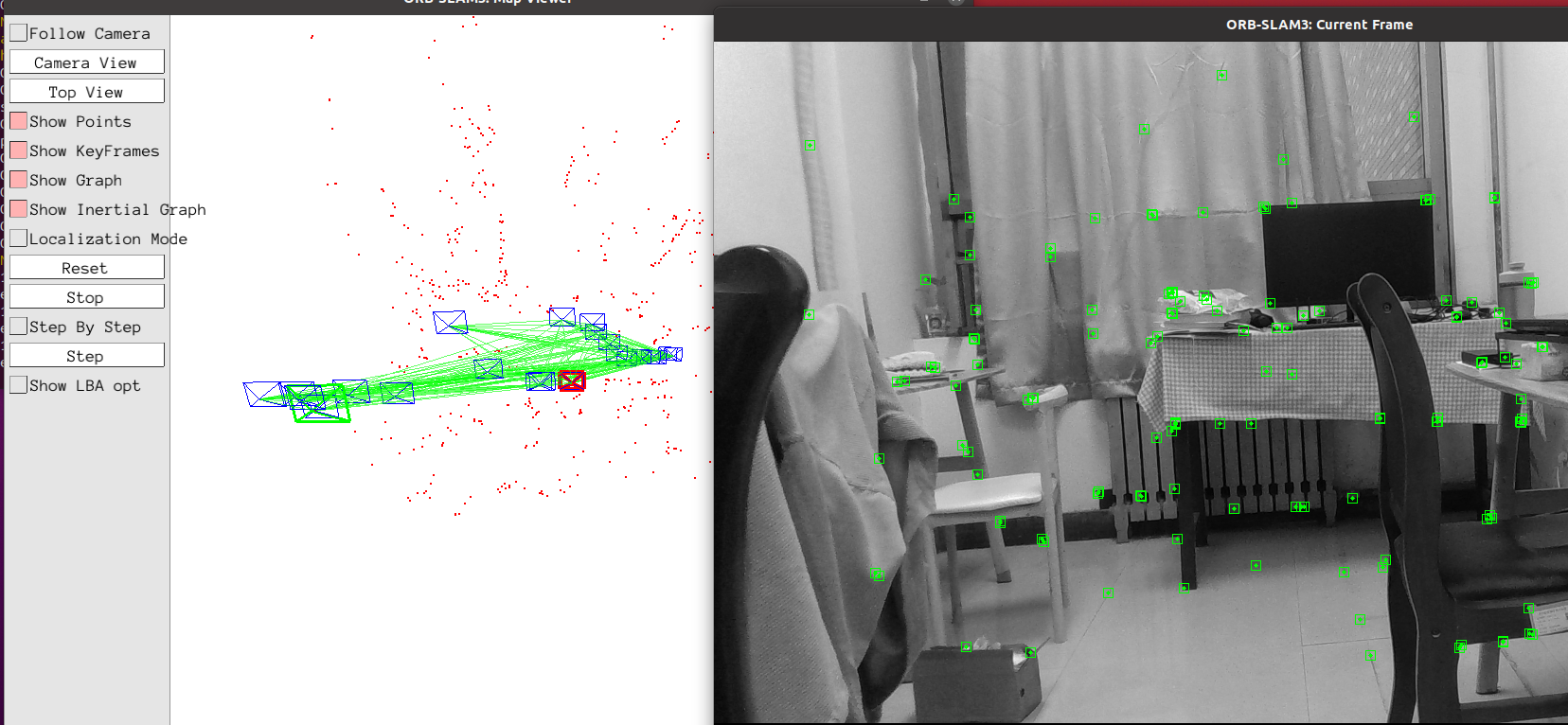
建议把Examples_old这个文件夹直接删除,避免和Examples/ROS/ORB_SLAM3路径发生冲突。
打开环境变量:
gedit ~/.bashrc
将以下路径加入环境变量:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/ubuntu/catkin_ws/src/ORB_SLAM3/Examples/ROS然后刷新一下即可。
source ~/.bashrc