Opencv(十二):图像矫正
文章目录
- 思维导图
- 前言
- 一、透视变换的核心概念与原理
- 1.1 透视变换与仿射变换的区别
- 1.2 透视变换的直观作用
- 二、透视变换的数学模型与公式推导
- 2.1 透视变换矩阵的定义
- 2.2 坐标转换公式推导
- 2.3 矩阵参数的物理意义
- 三、OpenCV透视变换核心函数解析
- 3.1 getPerspectiveTransform()函数
- 函数语法
- 参数详解
- 返回值
- 使用注意事项
- 3.2 warpPerspective()函数
- 函数语法
- 参数详解
- 返回值
- 3.3 函数组合使用逻辑
- 四、图像矫正实战
- 4.1 代码实现与优化
- 完整代码示例
- 五、总结与进阶学习建议
- 5.1 核心知识点总结
思维导图

前言
在机器视觉领域,图像矫正技术是解决视角畸变问题的关键手段。无论是自动驾驶中的车道线识别、文档扫描后的倾斜校正,还是工业检测中的目标定位,都离不开图像矫正技术的支撑。而透视变换作为图像矫正的核心原理,能够有效修正因拍摄角度导致的物体形变,让图像中的目标呈现更符合人眼直观感受的视角。
一、透视变换的核心概念与原理
1.1 透视变换与仿射变换的区别
要理解透视变换,首先需要明确其与常见的仿射变换的差异。仿射变换是将二维坐标系转换到另一二维坐标系的线性变换,仅包含旋转和平移操作,核心特点是保持图形的平行性——即平行四边形经过仿射变换后依然是平行四边形。但在现实场景中,我们观察物体时会受到"近大远小"的透视效果影响,比如从斜上方拍摄的车道线,会呈现出远端收缩的梯形形态,这种畸变仅靠仿射变换无法修正。
透视变换(又称单应性变换)则突破了线性变换的限制,它是将图像投影到新视平面的过程,本质是三维空间到二维平面的投影转换。其核心优势在于能够处理透视畸变,不仅保持直线的共线性(直线经过变换后依然是直线),还能改变物体的观察视角。例如,将平视视角下的倾斜车道线,通过透视变换转换为俯视视角的平行车道线,这正是图像矫正的核心目标。
1.2 透视变换的直观作用
透视变换的本质的是改变图像中目标物体的观察视角。在实际应用中,透视变换的作用主要体现在两个方面:
- 视角矫正:将倾斜视角转换为正射视角,如把斜拍的文档转换为正上方拍摄的正视效果;
- 畸变修正:消除"近大远小"导致的图形形变,如将梯形的车道线区域修正为平行的矩形区域。
简单来说,透视变换就像是给图像换了一个观察角度,让原本因拍摄位置限制而畸变的目标,以更规整的形态呈现,为后续的图像分析和识别提供便利。
二、透视变换的数学模型与公式推导
2.1 透视变换矩阵的定义
透视变换的实现依赖于3×3的透视变换矩阵,该矩阵是连接原始图像坐标与变换后图像坐标的核心桥梁。其数学表达式如下:

其中:
- (x, y) 是原始图像中像素点的二维坐标;
- 3×3矩阵中的元素 ( a11) 至 ( a33) 是变换参数,包含旋转量、平移量等关键信息;
- (X, Y, Z) 是变换后的三维中间坐标,通过后续归一化得到二维图像坐标。
2.2 坐标转换公式推导
透视变换的核心是通过矩阵运算将原始坐标 ( (x, y) ) 转换为目标坐标 ( (x’, y’) ),具体推导过程如下:
-
矩阵乘法展开:
根据上述矩阵运算规则,将三维中间坐标展开为具体表达式:
![[ X = a_{11} \cdot x + a_{12} \cdot y + a_{13} ]
[ Y = a_{21} \cdot x + a_{22} \cdot y + a_{23} ]
[ Z = a_{31} \cdot x + a_{32} \cdot y + a_{33} ]](https://i-blog.csdnimg.cn/direct/ce1eeaa465374c8782dce896369c49de.png)
-
二维坐标归一化:
由于透视变换涉及三维投影到二维的过程,需要通过除以中间变量 ( Z ) 进行归一化,得到最终的二维目标坐标:
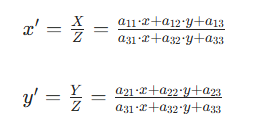
这里需要注意的是,透视变换矩阵的推导涉及三维空间到二维平面的投影转换,过程较为复杂,但在实际应用中无需手动计算矩阵元素,可通过工具函数自动生成,核心是理解坐标转换的逻辑。
2.3 矩阵参数的物理意义
透视变换矩阵的9个参数可分为三个功能模块,分别对应不同的变换效果:
- 左上角2×2子矩阵

:主要控制图像的旋转和缩放; - 第一列和第二列的最后一个元素 (a31)、( a32):控制透视畸变的程度,是实现"近大远小"修正的关键参数;
- 第三列前两个元素 (a13)、( a23}):控制图像的平移,即整体位置的偏移;
- 右下角元素 (a33):通常设为1,用于维持坐标归一化的尺度。
这些参数的组合作用,使得透视变换能够灵活调整图像的视角和形态,从而实现精准的图像矫正。
三、OpenCV透视变换核心函数解析
在实际开发中,OpenCV提供了两个核心函数用于实现透视变换,分别是生成透视变换矩阵的getPerspectiveTransform()和执行透视变换的warpPerspective()。下面将详细解析这两个函数的参数、功能和使用场景。
3.1 getPerspectiveTransform()函数
该函数的作用是根据原始图像和目标图像的对应点,生成3×3的透视变换矩阵。
函数语法
cv2.getPerspectiveTransform(src, dst)
参数详解
- src:原始图像中待变换区域的四个顶点坐标,数据类型为
np.float32,格式为[[x1,y1], [x2,y2], [x3,y3], [x4,y4]]。这四个点需构成一个四边形,通常选择目标物体的边界角点(如文档的四个角、车道线的四个端点)。 - dst:目标图像中对应的四个顶点坐标,数据类型同样为
np.float32。这四个点定义了原始四边形变换后的形状,通常设置为规则的矩形(如[[0,0], [width,0], [width,height], [0,height]]),以实现矫正效果。
返回值
返回一个3×3的numpy数组,即透视变换矩阵M,可直接用于后续的warpPerspective()函数。
使用注意事项
- 四个对应点的顺序必须一致,如均按"左上→右上→右下→左下"的顺时针顺序排列,否则会导致变换后的图像错乱;
- 原始图像的四个点不能共线,需构成凸四边形,否则无法生成有效的透视变换矩阵;
- 坐标值需为浮点数类型,即使是整数坐标,也需转换为
np.float32格式。
3.2 warpPerspective()函数
该函数的作用是利用生成的透视变换矩阵,对输入图像执行透视变换,得到矫正后的图像。
函数语法
cv2.warpPerspective(src, M, dsize, flags=None, borderMode=None)
参数详解
- src:输入图像,即需要进行矫正的原始图像,可通过
cv2.imread()函数读取; - M:透视变换矩阵,由
getPerspectiveTransform()函数生成; - dsize:输出图像的尺寸,格式为
(width, height)(注意是宽度在前、高度在后),通常根据目标场景需求设置,如文档矫正可设置为(800, 1000); - flags:插值方法标记,用于控制图像变换过程中的像素插值方式,常用取值如下:
cv2.INTER_NEAREST:最近邻插值,速度最快但效果较差;cv2.INTER_LINEAR:双线性插值,兼顾速度和效果,默认值;cv2.INTER_CUBIC:双三次插值,效果较好但速度较慢;cv2.INTER_LANCZOS4: Lanczos插值,适用于图像放大,效果最优;
- borderMode:边界填充模式,用于处理变换后图像边界的空白区域,常用取值为
cv2.BORDER_CONSTANT(常量填充)和cv2.BORDER_REPLICATE(复制边界像素填充),默认值为cv2.BORDER_REFLECT(反射填充)。
返回值
返回矫正后的图像,数据类型为numpy数组,可通过cv2.imshow()显示或cv2.imwrite()保存。
3.3 函数组合使用逻辑
透视变换的实现流程本质是"定义对应点→生成矩阵→执行变换"的三步法,两个核心函数的组合使用逻辑如下:
- 先通过人工标注或自动检测,获取原始图像中待矫正区域的四个顶点坐标(src);
- 定义这四个顶点在目标图像中的理想坐标(dst),通常为规则矩形;
- 调用
getPerspectiveTransform(src, dst)生成透视变换矩阵M; - 调用
warpPerspective(src_img, M, dsize)执行变换,得到矫正后的图像。
这种组合方式能够快速实现精准的图像矫正,适用于大多数机器视觉场景。
四、图像矫正实战
4.1 代码实现与优化
完整代码示例
#导入opencv库,方便调用函数
import cv2
import numpy as np
#1.读取图片
image_np = cv2.imread('./test.png')
#获取图像大小
img_shape = image_np.shape#2.定义原始图像中四个顶点的坐标
points1 = np.float32([[210,115],[685,170],[135,400],[650,460]])
#定义目标图像中,这四个顶点坐标所对应得位置
points2 = np.float32([[0,0],[img_shape[1],0],[0,img_shape[0]],[img_shape[1],img_shape[0]]])cv2.line(image_np, points1[0].astype(np.int64).tolist(),points1[1].astype(np.int64).tolist(),(0,0,255),1,lineType=cv2.LINE_AA)
cv2.line(image_np, points1[0].astype(np.int64).tolist(),points1[2].astype(np.int64).tolist(),(0,0,255),1,lineType=cv2.LINE_AA)
cv2.line(image_np, points1[3].astype(np.int64).tolist(),points1[1].astype(np.int64).tolist(),(0,0,255),1,lineType=cv2.LINE_AA)
cv2.line(image_np, points1[3].astype(np.int64).tolist(),points1[2].astype(np.int64).tolist(),(0,0,255),1,lineType=cv2.LINE_AA)#3.获取透视变换矩阵
M = cv2.getPerspectiveTransform(points1,points2)#得到透视变换矩阵#4.进行透视变换
image_warp = cv2.warpPerspective(image_np,M,(img_shape[1],img_shape[0]))#5.显示
cv2.imshow('image_np',image_np)
cv2.imshow('image_warp',image_warp)
cv2.waitKey(0)
输出结果为:


五、总结与进阶学习建议
5.1 核心知识点总结
本文围绕图像矫正的核心技术——透视变换,从原理、数学模型、工具函数到实战应用进行了全面解析,核心知识点如下:
- 透视变换是处理透视畸变的关键技术,能够改变图像的观察视角,区别于保持平行性的仿射变换;
- 透视变换的数学核心是3×3变换矩阵,通过坐标归一化实现原始坐标到目标坐标的转换;
- OpenCV的
getPerspectiveTransform()和warpPerspective()是实现透视变换的核心工具,需掌握参数配置和使用场景; - 实战中需注意坐标顺序、图像路径、插值方法等关键细节,避免常见错误。
图像矫正技术是机器视觉的基础,掌握透视变换的核心原理和实战技巧,能够为后续的图像分析、目标识别等高级应用打下坚实的基础。通过不断的实践和进阶学习,可逐步提升对复杂场景的处理能力,应对更多实际工程问题。