实战指南:使用 CAN FD LIN网关进行嵌入式开发与协议转换
集路由、记录、仿真于一体,基于STM32G4的可编程嵌入式平台深度解析
1. 不止是网关,更是开发平台
MACH SYSTEMS的CAN FD LIN网关(CAN-FD-LIN-GW)是一款在汽车电子和工业通信领域极具实用价值的可编程嵌入式设备。其核心定位超越了传统的协议转换网关,集成了路由器、数据记录器、总线仿真器三大功能。
对于嵌入式工程师而言,其最大的价值在于:提供了一个基于标准C/C++和STM32生态的、硬件接口完备的二次开发平台,允许我们快速实现高度定制化的通信解决方案。

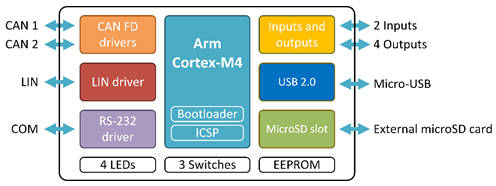
2. 硬件架构解析
2.1 核心控制器:性能强劲的STM32G4
MCU:
STM32G483RET6内核: Arm® Cortex®-M4 with FPU and DSP
主频: 170 MHz
存储: 512 KB Flash, 128 KB SRAM
优势: 对于处理CAN FD的高速数据流、运行复杂的路由算法、以及进行实时数据打包记录,M4内核的算力绰绰有余。FPU的存在使得在进行传感器数据(模拟输入)处理时更加高效。
2.2 通信接口与收发器
CAN FD: 2个独立通道,使用
MCP2562FD收发器。支持 CAN 2.0 A/B 和 ISO CAN FD。
CAN FD的 64字节数据场 和 可变速率 特性,使其非常适合传输非标数据或进行固件升级(Bootloader)。
LIN: 1个通道,使用
MCP2003B收发器。支持主/从模式,兼容 LIN 2.2A。
RS-232: 1个通道,通过DB9接口引出。可用于连接老式设备或作为调试日志输出端口。
2.3 扩展IO与存储
模拟/数字输入 (x2):
A1/D11,A2/D12,支持0-5V电压测量。可连接电位器、模拟传感器或作为数字开关量输入。数字输出 (x4): 均支持PWM,驱动能力各异:
DO1: 高边开关,5V/0.5A。DO2/DO3: 推挽输出,5V/0.5A。DO4: 低边开关,40V/1.5A。这个输出非常实用,可以直接驱动继电器、电磁阀、小型电机等大功率负载,省去了外部的MOSFET或驱动IC。
存储:
板载
16 KbitEEPROM:存放配置参数、VIN号、校准数据等。MicroSD卡槽:用于海量数据记录、存储DBC/LDF文件、或作为固件更新介质。
3. 软件开发环境搭建
官方推荐使用 STM32CubeIDE,这是一个免费且功能强大的集成开发环境。
开发流程简要说明:
获取资源:从官网或供应商处获取设备对应的STM32CubeMX配置文件(
.ioc)及基础示例代码。工程配置:在STM32CubeIDE中打开
.ioc文件,直观地配置引脚、时钟树、外设参数(如CAN的波特率、FD模式、LIN的波特率、主从模式等)。代码生成:使用STM32CubeMX生成初始化C代码。
业务逻辑开发:在生成的代码框架中,添加自己的应用逻辑,例如:
CAN报文的接收过滤、解析与转发。
LIN调度表的实现与信号处理。
模拟输入的ADC采集与判断。
SD卡的文件系统操作(FATFS)。
编译与调试:
编译: 使用内置的GNU ARM工具链。
调试: 通过板载的 ST-LINK SWD接口,配合一个简单的ST-LINK调试器,即可进行在线调试、断点、变量监视,极大提升开发效率。

4. 典型应用代码片段举例
4.1 CAN FD报文接收与LIN转发
假设实现一个功能:当收到CAN ID为0x100的报文时,将其第一个字节的数据作为LIN信号值,通过LIN总线发送。
// STM32 HAL 库示例代码 (简化的逻辑)
// CAN 接收回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) {
CAN_RxHeaderTypeDef rxHeader;
uint8_t rxData[64];
if (HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rxHeader, rxData) == HAL_OK) {
if (rxHeader.StdId == 0x100) { // 匹配目标CAN ID
// 准备LIN数据
uint8_t linData[1] = {rxData[0]};
// 假设使用LIN1,主节点模式,发送ID为0x20的帧
Send_LIN_Frame(&hline, 0x20, linData, 1);
}
}
}
4.2 模拟输入监控与数字输出控制
监控A1引脚电压,当超过2.5V时,触发DO4输出,控制一个继电器。
// 在主循环或ADC中断中
void Monitor_Input(void) {
uint16_t adcValue;
float voltage;
HAL_ADC_Start(&hadc1);
if (HAL_ADC_PollForConversion(&hadc1, 10) == HAL_OK) {
adcValue = HAL_ADC_GetValue(&hadc1);
voltage = (adcValue * 3.3f) / 4095.0f; // 假设参考电压3.3V, 12位ADC
if (voltage > 2.5f) {
HAL_GPIO_WritePin(DO4_GPIO_Port, DO4_Pin, GPIO_PIN_SET); // 开启DO4
} else {
HAL_GPIO_WritePin(DO4_GPIO_Port, DO4_Pin, GPIO_PIN_RESET); // 关闭DO4
}
}
}
5. 固件更新方式
该网关提供了极大的更新灵活性,非常适合现场部署:
USB:通过虚拟串口(CDC)进行拖拽式更新或使用专用工具。
CAN:实现一个CAN Bootloader,可用于对整车网络中的多个设备进行远程、集中式刷写。
RS-232:通过串口工具进行更新。
ICSP (SWD): 最基础的JTAG/SWD接口,用于最初的原型开发和深度调试。
优势总结:
接口丰富:双CAN FD、LIN、RS-232、多路IO,覆盖广。
开发友好:基于成熟的STM32G4生态,工具链完善,调试方便。
功能集成度高:单一设备完成通信、记录、控制,降低系统复杂度。
可编程性强:C/C++开发,自由度极高,可实现复杂逻辑。
典型适用场景:
汽车电子:ECU仿真、总线数据监控与记录、诊断网关、车载网络测试。
工业通信:协议转换桥接(如CAN转RS-232给老式PLC)、设备联网、数据采集与控制系统。
科研与教育:作为通信网络的实验平台,学习CAN、LIN、嵌入式系统开发。
对于需要处理多协议总线通信、并希望拥有完全控制权的工程师来说,MACH SYSTEMS的这款网关是一个非常出色且高性价比的选择。了解更多的信息,联系广州智维电子。提供免费技术支持。获取您的专属解决方案;