S32K146 -CAN(FlexCAN)收发-经验教训
前言:下面是一篇面向嵌入式开发者的实战型博客,汇总我在用 S32K146(S32K1 系列)上做 CAN / FlexCAN 收发时的关键经验、容易踩坑的地方、调试技巧和推荐实践。文章兼顾原理、软件实现要点与工程级的排查流程,适合想把 CAN 通信做到可靠、可维护的工程师阅读。
目录
一、背景介绍
二、CAN介绍
三、方案的分析
四、实现
1.UI配置
2.接收初始化
3.发送初始化
4.回调函数
5.CAN初始化
6.CAN发送
5、总结
一、背景介绍
在本章中,我们将详细介绍 如何在 NXP S32K146 上初始化 CAN 模块,包括接收与发送部分的配置步骤。同时,当产品需要以更高频率发送 CAN 报文时,我们也会分享一些代码编写的经验与优化技巧。通过本章的讲解,你将更清晰地理解 CAN 配置流程与实现逻辑,为后续开发打下扎实基础。
二、CAN介绍
在通信方面,S32K146 集成了多达三路 CAN 控制器(FlexCAN 模块),支持以下特性:
-
✅ 标准帧(11位ID) 与 扩展帧(29位ID)
-
✅ CAN 2.0A/B 协议,兼容主流车载通信标准
-
✅ 硬件滤波器与掩码配置,可有效筛选接收报文
-
✅ 中断与DMA支持,提升接收效率与系统响应速度
-
✅ 灵活的波特率配置,常用速率从 125 kbps 到 1 Mbps 皆可实现
-
✅ 可选的 环回(Loopback)模式,方便在开发阶段进行通信验证
借助 NXP 的 S32 Design Studio 与 Processor Expert(或配置UI) 工具,开发者可以以图形化方式快速完成 CAN 的时钟、引脚、多路选择及波特率配置,极大地降低了开发复杂度。
三、方案的分析
在我们的项目中,时钟配置、CAN引脚选择以及波特率设置都可以直接在 S32配置界面(UI) 中完成,极大地简化了初始化过程。CAN数据的接收采用中断方式,这样在有新数据到来时,系统能够第一时间响应处理,保证了通信的实时性。
四、实现
1.UI配置
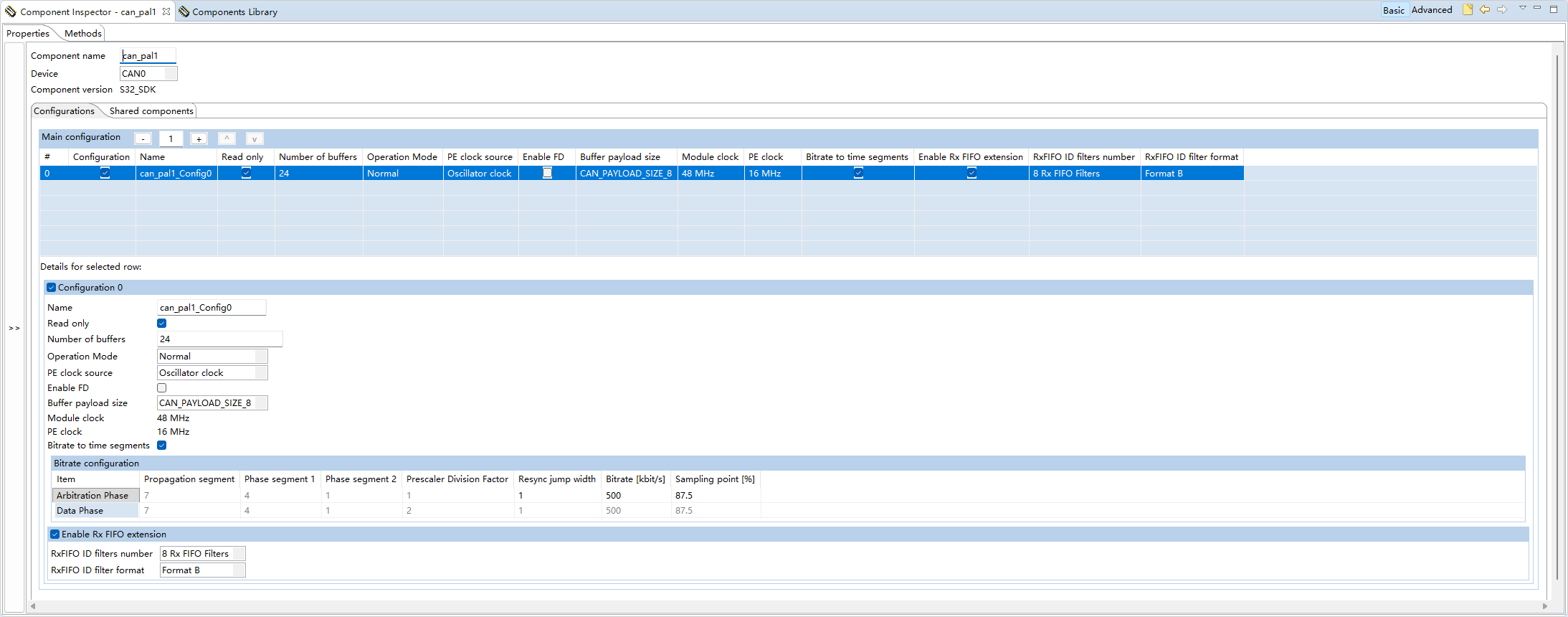
在本项目的 CAN 配置中,我们启用了 Rx FIFO(接收 FIFO)功能。
当开启该功能后,FlexCAN 模块会自动占用部分邮箱资源,用于接收缓冲区的管理。具体来说,邮箱 0 至 邮箱 5(共 6 个邮箱)将被硬件分配给 Rx FIFO 使用,用于存储接收到的 CAN 报文。
这意味着用户在应用层编程时,可用于普通发送和接收的邮箱数量会相应减少。
例如,在 S32K146 默认的 24 个邮箱配置下,启用 FIFO 后,剩余 邮箱 6 至 邮箱 23 可以被用户自由用于发送或标准接收任务。
启用 FIFO 的优势在于:
-
✅ 接收效率更高,FIFO 结构可以自动缓存多帧数据;
-
✅ 减少 CPU 频繁处理中断的负担;
-
✅ 更适合高频率、多报文 ID 的通信场景。
不过也需要注意:
-
⚠️ 启用 FIFO 会减少可自由分配的邮箱数量;
-
⚠️ FIFO 机制对滤波器配置(Rx FIFO Filters)的要求更严格,需要合理设置 ID 过滤表。
2.接收初始化
static void CAN_Rx_Init(void)
{uint32_t i = 0;uint16_t u16CanFifoNum;/* ------------------------- Step 1. 计算 FIFO 所需过滤器数量 -------------