[Avoid-MPC] 基于双KD树模型预测控制的无地图避障飞行
链接:2503.10141] Mapless Collision-Free Flight via MPC using Dual KD-Trees in Cluttered Environments
docs:Avoid-MPC
Avoid-MPC项目为无人机配备了自主避障能力。
它利用*高级模型预测控制(MPC)系统进行最优路径规划,并通过实时KD树地图*实现即时障碍物感知
该系统通过ROS与AirSim模拟器无缝集成,支持对模拟无人机的全面测试与控制
能处理传感器数据、管理配置,并生成精确的控制指令,以实现安全高效的导航
可视化
章节
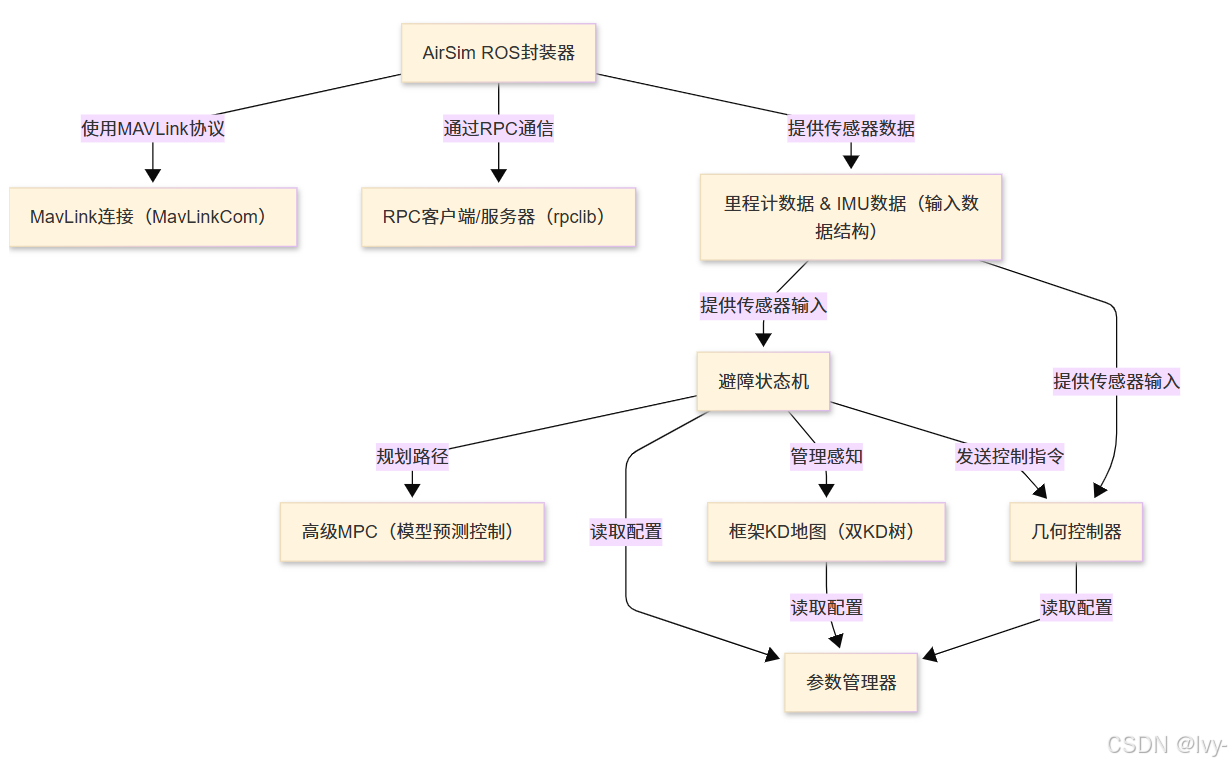
- 避障状态机
- 里程计数据 & IMU数据(输入数据结构)
- 高级MPC(模型预测控制)
- 框架KD地图(双KD树)
- 几何控制器
- AirSim ROS封装器
- 参数管理器
- MavLink连接(MavLinkCom)
- RPC客户端/服务器(rpclib)
基于双KD树模型预测控制的无地图避障飞行
摘要
在杂乱环境中实现无碰撞飞行是自主四旋翼飞行器的关键能力。
传统方法通常依赖详细的3D地图构建、轨迹生成与跟踪。但这种级联式流程会引入累积误差和计算延迟,限制飞行敏捷性与安全性。
本文提出了一种无需显式构建3D地图或生成跟踪避障轨迹的新方法,通过模型预测控制(MPC)直接根据深度相机稀疏点云生成安全动作。
-
我们创新性地引入双KD树机制:障碍KD树快速识别最近障碍物实现避障,边缘KD树为MPC求解器提供鲁棒初始猜测以避免局部最优。
-
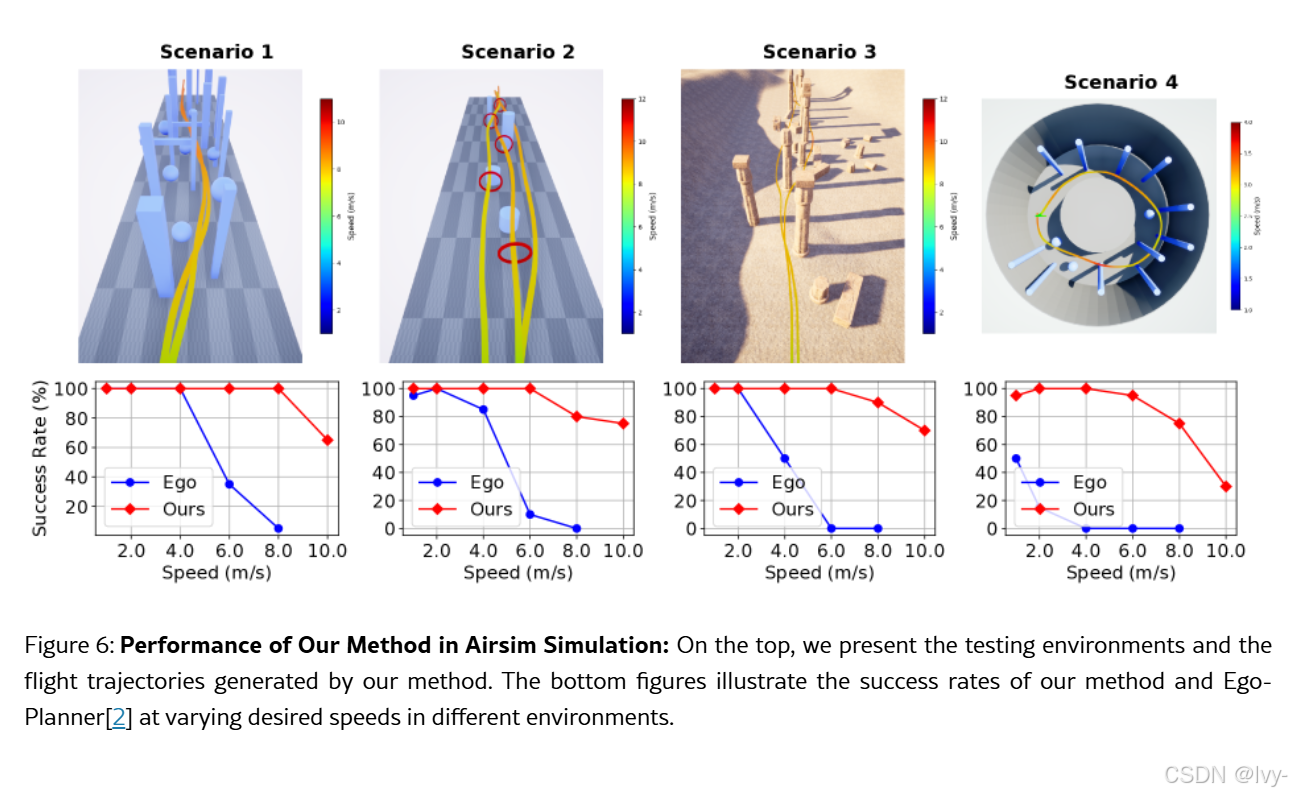
经大量仿真与实物验证,本方法在仿真中可实现12m/s、实物测试中6m/s的可靠避障,性能显著优于基于地图构建和模仿学习的方法
引言
无碰撞穿越杂乱环境始终是自主四旋翼飞行器的核心挑战。
传统方法采用多级分层框架:先通过占据栅格或欧氏符号距离场(ESDF)构建显式地图,再生成避障路径并参数化为多项式/B样条轨迹,最后由底层控制器跟踪。
这种级联范式存在两个固有缺陷:
-
一是各模块误差累积会导致飞行器失控
-
二是串行工作流带来显著计算延迟,影响高速场景的响应能力。
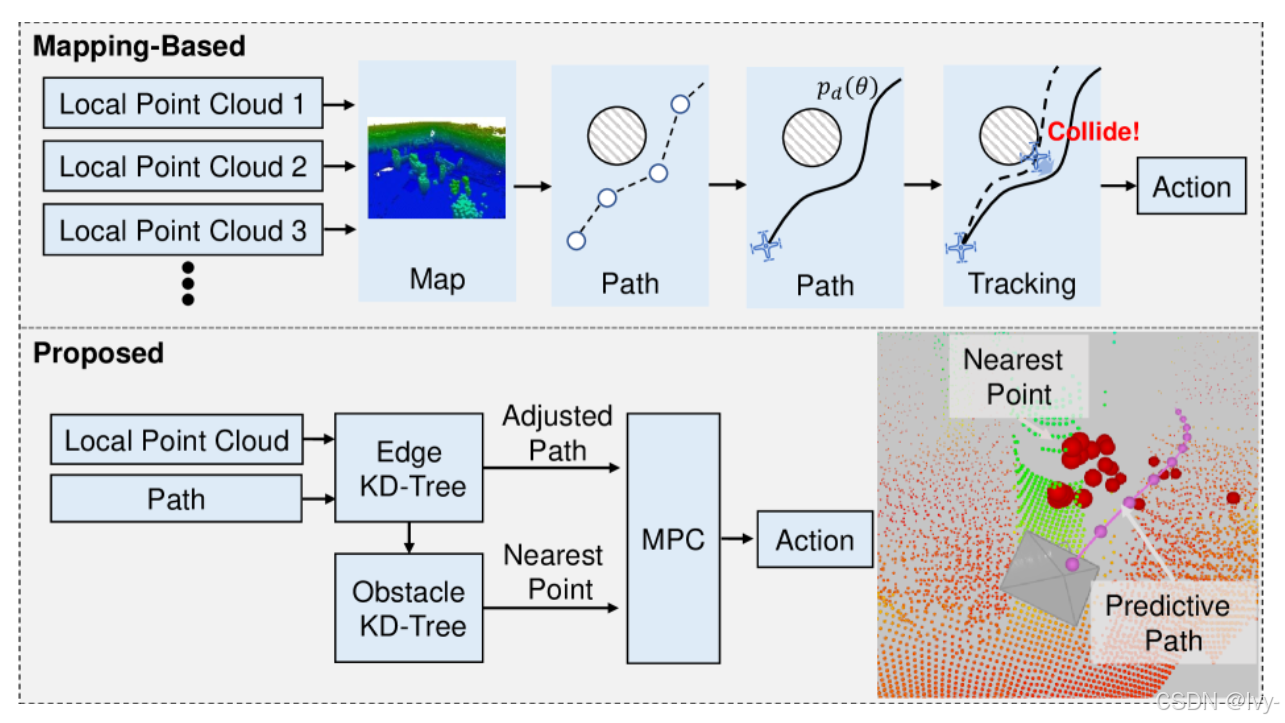
如图所示,与传统建图-规划-跟踪流程相比,我们提出的框架通过MPC直接优化避障动作。
系统架构(图2)包含双KD树模块:
- 边缘KD树通过膨胀边缘图调整参考路径,障碍KD树执行KNN最近邻查询计算碰撞代价
- 最终通过非线性规划(NLP)生成实时控制指令。
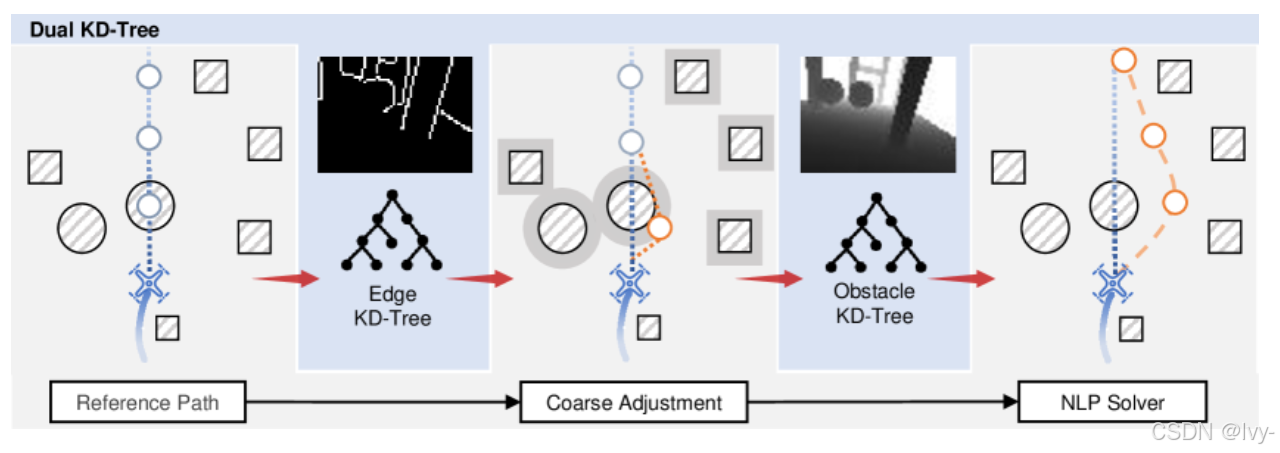
本系统包含:
(1) 双KD树模块——障碍KD树计算碰撞代价,边缘KD树调整航点优化初始值;
(2) MPC优化模块实时规划控制。系统从当前位置向目标稀疏采样航点,通过深度图构建双KD树,检测到潜在碰撞时调整航点,最终MPC模块结合运动学约束和碰撞代价优化航点,生成控制指令发送至飞控单元(FCU)
(一些3d游戏的设计代入解决现实问题也是好起来了bush)
还有一些公式 不是很好打,感兴趣的去看原文叭orz