Voronoi 图及其在路径搜索中的应用
Voronoi 图及其在路径搜索中的应用
1. Voronoi 图的基本概念
Voronoi 图(Voronoi Diagram),又称泰森多边形(Thiessen Polygon)、Dirichlet Tessellation,是一种根据距离度量将平面空间划分为若干个区域的方法。
给定平面上的一组离散点集
P={p1,p2,…,pn}
P = \{p_1, p_2, \dots, p_n\}
P={p1,p2,…,pn}
对于空间中任一位置 xxx,令 dist(x,pi)\text{dist}(x, p_i)dist(x,pi) 表示从 xxx 到点 pip_ipi 的距离(常用欧氏距离)。
Voronoi 区域 V(pi)V(p_i)V(pi) 定义为:
V(pi)={x∣dist(x,pi)≤dist(x,pj),∀j≠i}
V(p_i) = \{ x \mid \text{dist}(x, p_i) \le \text{dist}(x, p_j), \forall j\neq i \}
V(pi)={x∣dist(x,pi)≤dist(x,pj),∀j=i}
换句话说,Voronoi 图将整个空间划分成 nnn 个区域,每个区域的所有点距离所属生成点最近。
2. 数学性质与特征
- 多边形结构:在二维欧氏空间中,Voronoi 区域是由线段和射线围成的凸多边形。
- 边界位置:边界是两生成点距离相等的所有位置的集合,即以两点为焦点的垂直平分线。
- 对偶关系:Voronoi 图的对偶图是德劳内三角剖分(Delaunay Triangulation),这使得在建模和算法实现上非常方便。
3. 构建算法
常见的构建方法包括:
- 直接几何法:穷举两点的垂直平分线,计算多边形交集(适用于小规模点集)。
- 扫描线算法:如 Fortune’s Algorithm,复杂度可达到 O(nlogn)O(n \log n)O(nlogn)。
- 基于 Delaunay 三角化:先求 Delaunay 三角剖分,再利用对偶关系生成 Voronoi 图。
4. Voronoi 图在路径搜索中的作用
Voronoi 图在路径规划和搜索领域非常有用,尤其适用于机器人导航、自动驾驶、地图分析等场景。应用价值主要体现为:
4.1 保持最大安全距离
在机器人导航中,如果障碍物或危险点视为生成点,通过构建 Voronoi 图,可以得到一个骨架网络(Voronoi 边)。这个骨架的位置通常远离障碍物,能保证机器人运动时与障碍物保持最大化的最小距离,提高安全性。
4.2 构造导航图
构建 Voronoi 图后,边界可以形成一组稀疏且连通的路径网络。路径规划可在该网络上进行,而不是在整个连续空间中搜索,减少了搜索空间和计算量。
4.3 与搜索算法结合
Voronoi 图可与常见搜索算法结合:
- A* 或 Dijkstra:在 Voronoi 图的边构成的网络上运行,快速获取全局最优路径。
- Probabilistic Roadmap (PRM) & RRT:Voronoi 边为采样提供安全参考,提高路径的可行性和稳定性。
4.4 应对动态场景
在动态环境中(如人群移动或车辆流动),可以根据目标和障碍的位置实时更新 Voronoi 网络,并重新进行路径搜索,适用于实时决策系统。
5. 应用实例(机器人路径规划)
场景:在一个平面地图中,多个障碍物作为生成点。
步骤:
- 输入数据:障碍物的位置坐标。
- 生成 Voronoi 图:计算边界与骨架结构。
- 建立图结构:将 Voronoi 边转化为节点与边的图。
- 运行搜索算法:在该图上用 A* 搜索起点到终点的最短路径。
- 输出路径:结果路径在空间上尽量远离障碍物,并能高效抵达终点。
此方法的优势:
- 安全距离最大化。
- 路径平滑且可预测。
- 可以与代价地图结合,进一步优化路径质量。
6. 总结
Voronoi 图通过距离度量自然地将空间划分为多个区域,它的骨架结构在路径规划中能提供安全、稀疏且高效的导航网络。结合图搜索算法与动态更新机制,Voronoi 图不仅适用于静态地图的最短路径规划,还能满足实时变化环境中的快速导航需求。
7. 示例及代码
import numpy as np
import matplotlib as mpl
mpl.get_cachedir()
import matplotlib.pyplot as plt
from scipy.spatial import Voronoi, voronoi_plot_2d
plt.rcParams["font.sans-serif"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False# 随机生成一些点(可代表障碍物或参考点)
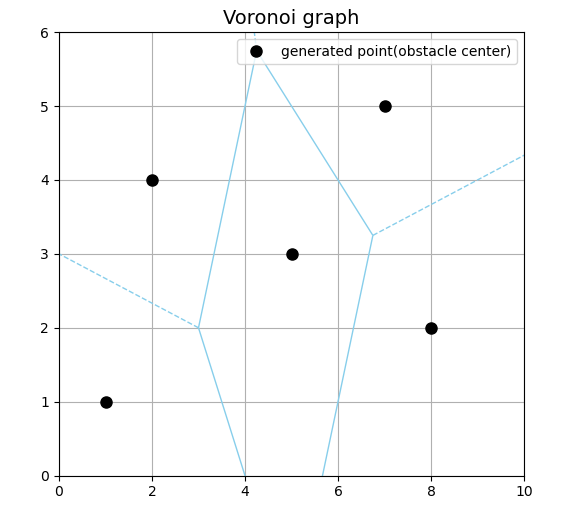
points = np.array([[1, 1], [2, 4], [5, 3], [7, 5], [8, 2]])# 计算 Voronoi 图
vor = Voronoi(points)# 绘制 Voronoi 图
fig, ax = plt.subplots(figsize=(6, 6))
voronoi_plot_2d(vor, ax=ax, show_points=True, show_vertices=False, line_colors="skyblue"
)# 绘制障碍物点
ax.plot(points[:, 0], points[:, 1], "ko", markersize=8, label="generated point(obstacle center)"
)# # 模拟路径搜索的结果(在骨架上选一条路径)
# # 这里用一条简化的路径作示意
# path = np.array([[0.5, 0.5], [2, 2], [4, 3], [6, 4], [9, 3]])
# ax.plot(path[:, 0], path[:, 1], "r-", linewidth=2, label="path search result")# 格式设置
ax.set_xlim(0, 10)
ax.set_ylim(0, 6)
ax.set_title("Voronoi graph", fontsize=14)
ax.legend()
ax.grid(True)plt.show()