基于ASM1042A系列芯片的CAN协议扩展方案在汽车座椅控制器中的应用探讨
摘要:本文基于国科安芯推出的ASM1042A系列芯片的CAN协议扩展方案在汽车座椅控制器中的应用,分析了ASM1042A系列芯片的特性、功能以及CAN协议的技术细节,结合汽车座椅控制器的实际需求,提出了针对性的扩展方案。该方案旨在提升汽车座椅控制器在复杂电磁环境下的通信稳定性和可靠性,同时满足国产化需求,为汽车平台化座椅控制器项目提供了技术参考。
一、引言
随着汽车电子技术的不断发展,汽车座椅控制器在功能和性能方面的要求日益提高。现代汽车座椅控制器不仅要实现基本的调节功能,还需支持更复杂的功能,如座椅记忆、按摩、通风等,这些功能的实现需要可靠的数据通信支持。ASM1042A系列芯片作为国科安芯推出的一款高性能的CANFD通信接口芯片,具有良好的国产化能力、高抗干扰性和可靠性,适用于汽车座椅控制器等对通信要求较高的应用场景。因此,本文将重点探讨基于ASM1042A系列芯片的CAN协议扩展方案在汽车座椅控制器中的应用。
二、ASM1042A系列芯片概述
(一)芯片特性
ASM1042A系列芯片是由厦门国科安芯科技有限公司研制的一款CANFD通信接口芯片,具有以下显著特性:
通过AEC-Q100Grade1认证,符合ISO11898-2:2016和ISO11898-5:2007物理层标准,保证了其在汽车电子环境中的可靠性和兼容性。
支持最高5Mbps的数据速率,并具有较短的对称传播延迟时间和快速循环次数,可增加时序裕量,在有负载CAN网络中实现更快的数据速率。
具备良好的EMC性能,支持SAEJ2962-2和IEC62228-3(最高500kbps)无需共模扼流圈,有效降低电磁干扰对通信的影响。
I/O电压范围支持3.3V和5VMCU,具有较强的通用性,可与不同类型的微处理器进行匹配。
未供电时具有理想无源行为,总线和逻辑引脚处于高阻态(无负载),在总线和RXD输出上实现上电/断电无干扰运行,提高了系统供电切换的安全性。
(二)保护特性
IECESD保护高达±15kV,可有效防止静电放电对芯片的损坏。
总线故障保护可达±70V,增强了芯片在异常电压情况下的自我保护能力。
VCC和VIO电源终端具有欠压保护功能,避免因电源电压异常导致芯片工作不稳定。
驱动器显性超时保护(TXDDTO)-数据速率低至10kbps,防止因数据发送故障导致总线阻塞。
热关断保护(TSD)功能可防止芯片在过热情况下工作,延长了芯片的使用寿命。
(三)收发器共模输入电压
ASM1042A系列芯片收发器共模输入电压为±30V,具有较宽的工作电压范围,能够适应复杂的汽车电气环境。
(四)电气性能指标
典型循环延迟为110ns,保证了快速的信号传输和响应能力。
符合AEC-Q100Grade1车规认证,满足汽车电子高可靠性要求。
三、汽车座椅控制器对通信接口的需求分析
现代汽车座椅控制器系统通常需要与多个电子控制单元(ECU)进行通信,例如与车身控制模块(BCM)交换座椅位置信息、与安全气囊控制单元协调座椅状态等。传统的RS485通信协议在汽车座椅控制器中得到了广泛应用,但随着功能的不断丰富和数据交互需求的增加,其通信速率和可靠性逐渐难以满足要求。CAN协议作为一种高性能的串行通信协议,具有以下优势:
高通信速率:CAN协议支持高达1Mbps的通信速率,能够满足汽车座椅控制器在快速响应和大量数据传输方面的需求。
高可靠性:CAN协议采用差分信号传输,具有较强的抗干扰能力,确保在复杂电磁环境下数据传输的稳定性。
多主通信模式:支持多个节点同时挂接在总线上,方便实现分布式控制系统的构建。
错误检测与处理机制:具备完善的错误检测和处理机制,能够自动重传错误帧,提高了通信的可靠性。
汽车座椅控制器在出口两轮车和平衡车以及汽车平台化座椅控制器项目中,对通信接口的要求进一步提高。这些应用场景不仅需要可靠的通信,还要求通信接口能够适应不同的工作环境和条件。例如,出口至不同国家和地区的两轮车和平衡车可能面临不同的电气标准和电磁环境,汽车平台化座椅控制器则需要在多种车型和平台上实现无缝集成。因此,对汽车座椅控制器通信接口进行CAN协议扩展具有重要意义。
四、基于ASM1042A系列芯片的CAN协议扩展方案设计
(一)方案架构
基于ASM1042A系列芯片的CAN协议扩展方案主要由以下部分组成:
ASM1042A系列芯片作为CAN协议控制器的核心,负责CAN总线的通信管理和数据帧的处理。
与微处理器(MCU)的接口模块,用于实现数据的双向传输和协议转换。
电源管理和保护电路,为芯片提供稳定的供电,并具备过压、欠压保护功能,确保系统的安全运行。
总线终端匹配网络,用于优化CAN总线的电气特性,减少信号反射和干扰。
(二)硬件电路设计
ASM1042A系列芯片的引脚包括TXD(发送器数据输入端)、RXD(接收器输出端)、VCC(收发器5V供电)、VIO(收发器I/O供电电源)、CANH和CANL(高/低电位CAN电压输入输出端)、STB(待机模式控制端)等关键引脚。在硬件设计中,需要根据芯片的引脚功能进行合理的布局和连接。
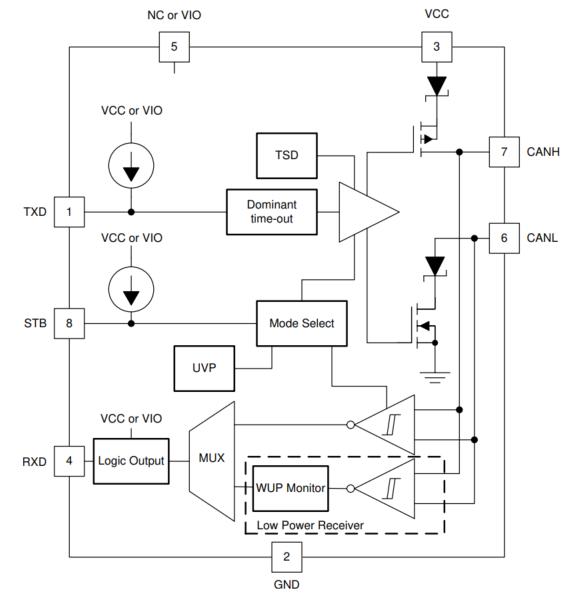

ASM1042A系列芯片引脚定义
电源电路设计:ASM1042A系列芯片的VCC引脚提供5V供电,VIO引脚提供I/O供电电源。为了确保供电的稳定性,可以采用线性稳压器或DC-DC转换器为芯片提供电源,并在电源输入端添加滤波电容以减少电源纹波。
CAN总线终端匹配网络设计:在CAN总线的两端应添加终端电阻,通常选择120Ω的电阻进行匹配,以减少信号反射和干扰。此外,还可以根据实际需要添加共模扼流圈等滤波元件,进一步提高总线的抗干扰能力。
保护电路设计:为了提高系统的可靠性,可以在CAN总线与芯片之间添加瞬态电压抑制二极管(TVS二极管)等保护器件,防止静电放电(ESD)和电快速瞬变脉冲群(EFT)等瞬态干扰对芯片造成损坏。
(三)软件设计
驱动程序开发:根据ASM1042A系列芯片的技术手册,开发相应的驱动程序,实现对芯片的初始化、数据发送和接收等功能。驱动程序需要与微处理器(MCU)的通信接口(如SPI或UART)进行适配,确保数据的正确传输。
CAN协议栈实现:在驱动程序的基础上,构建CAN协议栈,包括帧格式处理、数据链路层协议控制、错误检测与处理等功能模块。协议栈需要遵循CAN2.0A/B或CANFD协议标准,确保与其他CAN节点的兼容性。
应用层软件开发:根据汽车座椅控制器的具体功能需求,开发应用层软件,如座椅位置调节控制、记忆功能实现、按摩和通风功能控制等。应用层软件通过调用CAN协议栈提供的API函数,实现与其他ECU的数据交互和功能协同。
五、结论与展望
基于ASM1042A系列芯片的CAN协议扩展方案在汽车座椅控制器中的应用具有显著的优势。该方案不仅提升了座椅控制器的通信速率和可靠性,还增强了系统的抗干扰能力和环境适应性,同时满足了国产化需求,降低了对进口芯片的依赖。
然而,随着汽车电子技术的不断发展,对通信接口的要求也在不断提高。未来,可以进一步优化基于ASM1042A系列芯片的CAN协议扩展方案,例如通过改进硬件电路设计和软件算法,提高系统的通信速率和抗干扰能力;探索与其他通信技术(如LIN、FlexRay、MOST等)的融合应用,构建更加灵活、高效的汽车电子控制系统;加强对芯片的安全性和加密技术研究,防止数据篡改和非法入侵,保障汽车电子系统的信息安全。此外,还应密切关注汽车电子行业的发展趋势和标准变化,及时更新和完善方案,以满足市场对高性能通信接口的持续需求。