“自然搞懂”深度学习(基于Pytorch架构)——010203
Forester’s Notebook
学习中很重要的一点——隐含定义(或者说默认规则),一个人理解知识的链路基于严密逻辑,这个链路是否被打通并且正确决定了他是否真正理解了所学知识,但教授知识的人真正做到这点是很难的,由于他自身对知识已了然于胸往往无法感同身受,从而容易忽略链路中潜在隐含的一些定义规则,导致学习者学完模棱两可,在偶然间学生了解到链路中的堵点或纠正了错点,我们便常说这个学生“开窍了”。
因此,我会在讲解中穿插加入Think-Help,同时希望读者指出错误并提出宝贵意见,万分感谢!
“自然搞懂”深度学习(基于Pytorch架构)
声明:本文以研0初学者视角撰写,力求通俗易懂,补齐坑点:将”定义不清“处用Think-Help讲解透彻,不易理解处用实例替换理论,同时句句都是经过认真思考后写下的,不说废话,保证笔记质量。
该笔记适合哪类人群?如何发挥作用?
- 学习过高数、线代及概率论基础知识(有印象即可)。
- 学习过机器学习基本模型及理论。
- 应用过深度学习算法但并不了解其理论。
- 学习过深度学习基本理论但模棱两可,或些许遗忘。
该笔记的优势已声明,请根据自身情况加以利用:可以跟着笔记走,亦可以结合参考视频,相信该笔记一定能在某些关键节点让您”恍然大悟“,避免不必要的坑点,浪费时间。
目前参考视频:
| 章节 | 参考视频 |
|---|---|
| 第Ⅰ章 初入茅庐 | 飞天闪客:一小时从函数到Transformer!一路大白话彻底理解AI原理 |
| 第Ⅱ章 小试牛刀 | 刘二大人 |
| 第Ⅲ章 渐入佳境 | 刘二大人 |
最后,该笔记凝聚作者大量时间精力,费了很多心血制作而成,如果给您带来一点帮助,欢迎关注/star哦,给作者持续创作的动力!
同时,如笔记中存在错误,欢迎指出;如您想要学习交流,欢迎私信!
精美原版PDF于Github自取!(烦请star哦)
https://github.com/Xueyouing/Study-Naturally
文章目录
- Forester's Notebook
- “自然搞懂”深度学习(基于Pytorch架构)
- 第Ⅰ章 初入茅庐
- 一、 数学的奥妙
- 二、梯度下降
- 2.1 自然引出
- 2.2 梯度下降三种方法
- 2.2.1 All(Gradient Descent)
- 2.2.2 One-By-One(Stochastic Gradient Descent)
- 2.2.3 Mini-Batch(小批量梯度下降法)
- 三、前向传播与反向传播
- 3.1 定义
- 3.2 实例
- 3.2.1 单样本点实例
- 3.2.2 多样本点实例
- 3.3 Think-Help
- 第Ⅱ章 小试牛刀
- 一、线性回归
- 1.1 Prepare Dataset
- 1.2 Design model using class
- 1.3 Construct loss and optimizer
- 1.4 Train cycle
- 二、逻辑斯蒂回归
- 2.1 问题讲解
- 2.2 代码实践
- 三、DataLoader完整流程
- 3.1 python组件间关系
- 3.2 Prepare Dataset
- 3.3 Design model using class
- 3.4 Construct loss and optimizer
- 3.5 Train cycle
- 四、多分类问题
- 4.1 问题讲解
- 4.2 代码实践
- 第Ⅲ章 渐入佳境
- 一、初识CNN
- 1.1 输入层(Input Layer)
- 1.2 卷积层(Convolution Layer)
- 1.3 池化层(Pooling Layer)
- 1.4 激活层(Activation Layer)
- 1.5 全连接层(Fully Connected Layer,FC Layer)
- 二、深入CNN
- 2.1 Inception Block
- 2.2 简化运算
- 2.3 梯度消失
- 三、实战CNN
- 四、初识RNN
- 4.1 前向传播
- 4.2 反向传播
- 4.3 更新方式
- 4.3.1 逐个样本训练(单样本模式)
- 4.3.2 mini-batch 训练(常用方式)
- 五、深入RNN
- 5.1 多分类问题
- 5.2 双向传播
- 5.3 GRU
- 5.3.1 GRU的提出
- 5.3.2 GRU思想
- 六、实战RNN
第Ⅰ章 初入茅庐
一、 数学的奥妙
【世上所有事物运行规律皆可用函数表达】
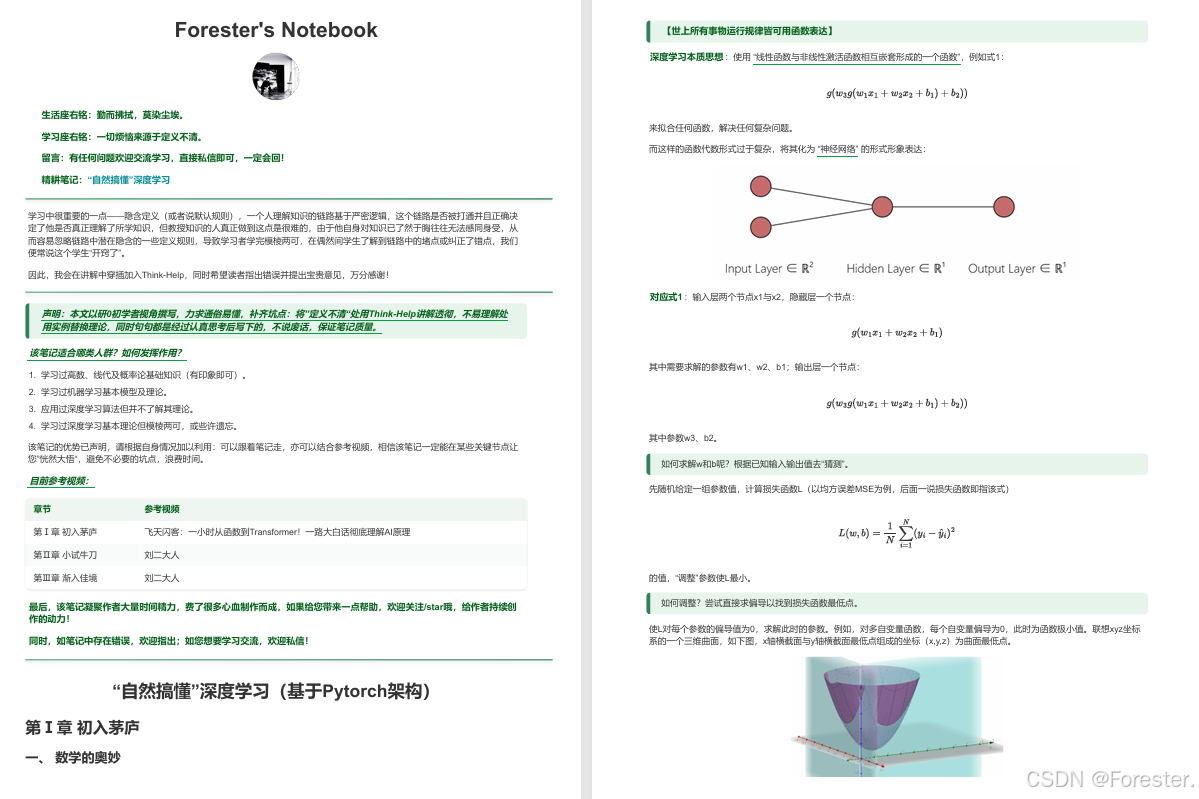
深度学习本质思想:使用 “线性函数与非线性激活函数相互嵌套形成的一个函数”,例如式1:
g(w3g(w1x1+w2x2+b1)+b2))g(w_3g(w_1x_1+w_2x_2+b_1)+b_2)) g(w3g(w1x1+w2x2+b1)+b2))
来拟合任何函数,解决任何复杂问题。
而这样的函数代数形式过于复杂,将其化为 “神经网络” 的形式形象表达:

对应式1:输入层两个节点x1与x2,隐藏层一个节点:
g(w1x1+w2x2+b1)g(w_1x_1+w_2x_2+b_1) g(w1x1+w2x2+b1)
其中需要求解的参数有w1、w2、b1;输出层一个节点:
g(w3g(w1x1+w2x2+b1)+b2))g(w_3g(w_1x_1+w_2x_2+b_1)+b_2)) g(w3g(w1x1+w2x2+b1)+b2))
其中参数w3、b2。
如何求解w和b呢?根据已知输入输出值去“猜测”。
先随机给定一组参数值,计算损失函数L(以均方误差MSE为例,后面一说损失函数即指该式)
L(w,b)=1N∑i=1N(yi−y^i)2L(w,b) = \frac{1}{N} \sum_{i=1}^{N} (y_i - \hat{y}_i)^2 L(w,b)=N1i=1∑N(yi−y^i)2
的值,“调整”参数使L最小。
如何调整?尝试直接求偏导以找到损失函数最低点。
使L对每个参数的偏导值为0,求解此时的参数。例如,对多自变量函数,每个自变量偏导为0,此时为函数极小值。联想xyz坐标系的一个三维曲面,如下图,x轴横截面与y轴横截面最低点组成的坐标(x,y,z)为曲面最低点。

然而将函数式带入损失函数L后,L变得极为复杂,直接令偏导为0求解变得不现实。
可以举一个简单例子:拟合式为y=wx+b,L仍为MSE,给定三个点A(1,1) B(2,2) C(3,3)带入得:
L=13[(w+b−1)2+(2w+b−2)2+(3w+b−3)2]L=\frac{1}{3} \left[ (w + b - 1)^2 + (2w + b - 2)^2 + (3w + b - 3)^2 \right] L=31[(w+b−1)2+(2w+b−2)2+(3w+b−3)2]
分别使L对w,b偏导为0联立得w=1,b=0,故y=x,完美拟合三点。
Think-Help
这里的拟合式省去了激活函数,实际不可省略,因为这是神经网络拟合复杂问题的基础。
这是一个最简单的例子,试想成千上万的参数和数据集,分别将样本点代入L,然后分别将上万个偏导式联立,求解对应上万个参数的解,基本不可能,而且很多时候无法直接求出偏导为零的解析解。
那怎么办?
二、梯度下降
2.1 自然引出
没办法直接求出来那就一点点试,仍以式2为例,梯度下降公式3如下:
w=w−η⋅∂L(w,b)∂wb=b−η⋅∂L(w,b)∂bw = w - \eta \cdot \frac{\partial L(w,b)}{\partial w}\\ b = b - \eta \cdot \frac{\partial L(w,b)}{\partial b} w=w−η⋅∂w∂L(w,b)b=b−η⋅∂b∂L(w,b)
偏导大于0,即参数与L的变化方向一致(如式3中w若“偏导L/偏导w”大于0,表示固定b,w增大L就增大),反之变化相反。
这样,式3就实现了永远朝着L减小的方向前进。(方向一致,减小参数;方向相反,增大参数)
每次都代入全部样本点进行参数更新吗?
在每一次epoch中,我们都有一组样本点(训练集)作为信息可以使用。比如在公式3中,其损失函数就是用全部样本点作为信息进行更新:在一次epoch中,把所有样本点的
损失平方求和再平均(即MSE)作为损失函数代入损失函数L对参数的求导式中,进行一次参数更新。
但是,在神经网络中比局部最优解更棘手的问题是——鞍点问题——即在迭代过程中往往会出现梯度接近0的情况,这就会导致参数更新几乎停滞(Why?Think a Think)。
于是,**随机梯度下降(SGD)**成为一种解决方法。
SGD在每一次epoch中依次对每个样本点进行梯度计算并更新参数,这样的话,一个epoch中,参数会像一位中风的老爷爷般哆嗦着向前移动,而不至于陷入鞍点无法移动。
Think-Help
使用随机梯度下降每一个epoch中,每个样本点都会被用于单独更新一次参数,而不是随机选取部分样本用于更新参数,随机性主要体现在随机打乱(shuffle)训练数据的顺序。
多说一句:为什么要继续移动?因为鞍点确实是一个或几个维度上的最优点,也就是部分参数达到了最优,但我们最终的目标是使目标函数达到最小,继续移动仍极大可能因整体参数变化而使目标函数最小。
前面说到:SGD会使参数像一位中风的老爷爷般哆嗦着向前移动,也就是参数更新极小极慢;而GD又像个疯狂老奶奶动不动就劈个叉,再也站不起来;那能不能正常点,小步快走呢?当然可以,在一个epoch中,将全部样本点分组打包,依次利用每一组样本进行梯度计算及参数更新即可,这就叫Mini-Batch。
2.2 梯度下降三种方法
接下来,我们具体来看一个epoch中【我特意强调了这点:希望读者以epoch作为单位】,参数更新的三种方式:
2.2.1 All(Gradient Descent)
疯狂的老奶奶——在一个epoch中一次选取全部样本点为“信息”进行一次参数更新。
公式表现:所有样本点损失进行MSE作为损失函数进行BP。
θ:=θ−η⋅1N∑i=1N∇θL(f(xi;θ),yi)\theta := \theta - \eta \cdot \frac{1}{N} \sum_{i=1}^{N} \nabla_\theta L(f(x_i;\theta), y_i) θ:=θ−η⋅N1i=1∑N∇θL(f(xi;θ),yi)
其中,θ:模型参数;η:学习率(learning rate);N:样本总数;L(⋅):损失函数;∇θL:对参数的梯度。
代码表现:
# Gradient Descent
for epoch in range(num_epochs):y_pred = model(X) # 所有样本一次前向传播loss = loss_fn(y_pred, y_true) # 计算整体损失grad = compute_gradients(loss, model) # 计算所有样本平均梯度model.parameters -= lr * grad # 一次更新参数2.2.2 One-By-One(Stochastic Gradient Descent)
蹒跚的老爷爷——在一个epoch中依次选取每个样本点为“信息”进行N(指样本点数量)次参数更新。
公式表现:每个样本点单独计算损失作为损失函数进行BP。
θ:=θ−η⋅∇θL(f(xi;θ),yi),i=1,2,…,N\theta := \theta - \eta \cdot \nabla_\theta L(f(x_i;\theta), y_i), \quad i = 1,2,\ldots,N θ:=θ−η⋅∇θL(f(xi;θ),yi),i=1,2,…,N
代码表现:
# Stochastic Gradient Descent
for epoch in range(num_epochs):for i in range(N): # N为样本数x_i, y_i = X[i], y_true[i]y_pred = model(x_i) # 单样本前向传播loss = loss_fn(y_pred, y_i)grad = compute_gradients(loss, model)model.parameters -= lr * grad # 每个样本都更新一次
2.2.3 Mini-Batch(小批量梯度下降法)
稳健的你——在一个epoch中分批次选取样本点组合为“信息”进行X(指批次数量)次参数更新。
公式表现:
θ:=θ−η⋅1m∑j=1m∇θL(f(xj;θ),yj),(xj,yj)∈Batchk\theta := \theta - \eta \cdot \frac{1}{m} \sum_{j=1}^{m} \nabla_\theta L(f(x_j;\theta), y_j), \quad (x_j, y_j) \in \text{Batch}_k θ:=θ−η⋅m1j=1∑m∇θL(f(xj;θ),yj),(xj,yj)∈Batchk
代码表现:
# Mini-Batch Gradient Descent
for epoch in range(num_epochs):for batch_X, batch_y in DataLoader(X, y_true, batch_size):y_pred = model(batch_X) # 小批量前向传播loss = loss_fn(y_pred, batch_y)grad = compute_gradients(loss, model)model.parameters -= lr * grad # 每个批次更新一次
自然地,Mini-Batch是目前训练中最常用的梯度下降方法,所以在其它场景一说梯度下降,即指Mini-Batch方法。
接下来,我们只需要计算损失函数对各参数的梯度即可完成更新。
如何计算?
三、前向传播与反向传播
前向传播(Forward Propagation)与反向传播(Back Propagation,简称“BP”)
许多学习资料中常把这节仅称作“反向传播”,我认为还是不应该落下前向传播,这才是一个整体参数更新过程。
3.1 定义
前向传播:输入样本进入神经网络,计算得到所有中间及最终结果。
Think-Help
已知样本点或样本矩阵(矩阵由多个样本点组成)及标注y值,参数集θ(如果初步迭代,初始设定;否则,就是上一次epoch计算得到的)及激活函数,那么所有中间结果、最终预测结果及Loss值都可得到。换句话说,该神经网络的所有值你都已知道。
反向传播:在神经网络中,反向计算每两层间导数,通过链式法则相乘,得到损失函数对各参数的梯度。
Think_Help
链式法则的应用:要求”偏导L/偏导w“和”偏导L/偏导W“,W是包含w的多项表达式,自然地想到先求后者,然后
∂L∂w=∂L∂W⋅∂W∂w\frac{\partial L}{\partial w} = \frac{\partial L}{\partial W} \cdot \frac{\partial W}{\partial w} ∂w∂L=∂W∂L⋅∂w∂W
可不可以直接把L写成w的表达式然后再直接求”偏导L/偏导w“,可以,但在神经网络复杂的体系中不现实。
3.2 实例
3.2.1 单样本点实例
建议先看一遍以下链接的例子(该例完整但过于简单):一文弄懂神经网络中的反向传播法——BackPropagation - Charlotte77 - 博客园
这是输入的样本点,相当于三种参数更新方法中的One-by-One,只通过这个例子学习的话会产生一个疑问:多个样本点(样本矩阵)同时输入是如何计算的呢?会不会需要一些特殊处理?
3.2.2 多样本点实例
我以Mini-Batch Size=2的情况手写了另一个例子:

采用学习率为0.01更新后:
W2new=[1,2]−0.01⋅[0,−30]=[1.00,2.30]W_2^{\text{new}} = [1, 2] - 0.01 \cdot [0, -30] = [1.00, 2.30] W2new=[1,2]−0.01⋅[0,−30]=[1.00,2.30]
b2new=0−0.01⋅(−8)=0.08b_2^{\text{new}} = 0 - 0.01 \cdot (-8) = 0.08 b2new=0−0.01⋅(−8)=0.08
W1new=[1−120]−0.01[00−34−50]=[1.00−1.002.340.50]W_1^{\text{new}} = \begin{bmatrix} 1 & -1 \\ 2 & 0 \end{bmatrix} - 0.01 \begin{bmatrix} 0 & 0 \\ -34 & -50 \end{bmatrix} =\begin{bmatrix} 1.00 & -1.00 \\ 2.34 & 0.50 \end{bmatrix} W1new=[12−10]−0.01[0−340−50]=[1.002.34−1.000.50]
b1new=[0.5,−0.5]−0.01[0,−16]=[0.50,−0.34]b_1^{\text{new}} = [0.5, -0.5] - 0.01[0, -16] = [0.50, -0.34] b1new=[0.5,−0.5]−0.01[0,−16]=[0.50,−0.34]
3.3 Think-Help
既然用了多个样本,为什么梯度计算过程中矩阵变大,但参数 w、b 的形状却没变?
参数w、b的形状只取决于网络结构,不取决于样本数量。
Think-Help
也就是说,无论你用 1 个样本还是 1 万个样本,只要输入维度、输出维度、每层的神经元数量没变,则参数矩阵的维度始终固定。
这里关键的魔法在于:矩阵乘法自动帮你把所有样本的梯度累加/求和,结果仍是固定形状的矩阵。
个人认为这是一个理解的堵点,我又整理了一个更为复杂(6样本 × 3特征)的例子以供理解,已上传至:Xueyouing/Study-Naturally
至于为何在神经网络中比局部最优解更棘手的问题是鞍点问题?
在一个具有高维空间的损失函数中,如果一个维度上(对应一个参数w_i)的梯度为0,这个时候这个参数的值为0,那么在的某个邻域内,要么是凸函数,要么是凹函数,在一个维度上,凸函数对应着极小值,凹函数对应着极大值,如果训练到了所有维度的参数的梯度均为0时,如果真的达到了极小值,那么就要求所有维度上在此点的一个邻域内都是凸函数,很显然,这样的概率是很小的,我们更有可能遇到的是鞍点(或者是平坦区域)。

该题解采自鞍点问题 - Hexo。
到这里,恭喜你!已经为神经网络运算提供了基本思路(函数形式)和可行方法(梯度下降+前反向传播)。
第Ⅱ章 小试牛刀
在初入茅庐后,我们首先将神经网络应用到较为简单的回归、分类问题中去,综合代码实践,知行合一。
一、线性回归
第Ⅰ章中,我们就是以线性回归举例的,所以我们围绕代码进行回顾及展开。
值得注意:本小节的四个环节(四部曲)即为深度学习标准处理流程,为保障阅读体验,各小节完整代码放于文末,参考刘二大人视频讲解。
1.1 Prepare Dataset
# 库——类——对象——实例
import torch
# 1. Prepare Dataset
x_data = torch.Tensor([[1.0],[2.0],[3.0]]) #创建二维张量(2D Tensor)
y_data = torch.Tensor([[2.0],[4.0],[6.0]]) #3个样本,1个特征
首先,主角登场:torch包——PyTorch核心包,其主要模块如下,都将是我们之后的常驻嘉宾:
| 模块 | 作用 | 举例 |
|---|---|---|
torch | 基础张量操作 | torch.tensor(), torch.mean() |
torch.nn | 构建神经网络层与模型 | nn.Linear, nn.ReLU, nn.Module |
torch.optim | 各种优化算法 | optim.SGD, optim.Adam |
torch.utils.data | 数据加载工具 | DataLoader, Dataset |
torch.autograd | 自动求导机制 | loss.backward() |
torch.cuda | GPU 控制与计算 | torch.cuda.is_available() |
torchvision (扩展包) | 图像数据集、模型、预处理 | transforms, datasets.CIFAR10 |
将其尽可能联系起来:

PyTorch 从 torch 模块出发,用 tensor 表示数据,autograd 实现自动求导,nn.Module 构建模型,optim 更新参数,最后通过 cuda 实现 GPU 加速。
接着,选取y=2x的3个点作为数据集,并将其转为张量——深度学习的基础单位。
Think-Help
张量(Tensor)就是多维数组,是标量、向量、矩阵的推广,有很好的数学表达性、可并行性和可求导性。
1.2 Design model using class
# 2. Design model using class
class LinearModel(torch.nn.Module): #该类继承自Module类def __init__(self): #每次创建对象时调用super(LinearModel,self).__init__() #调用父类的初始化self.linear = torch.nn.Linear(1,1) #装一个线性层:y=wx+bdef forward(self,x): #当后续执行 model(x) 时,自动调用这个 forward 函数y_pred = self.linear(x) #将输入x丢进线性层return y_pred
model = LinearModel()
使用线性模型类搭建神经网络
首先初始化:继承父类的方法(如注册网络层、管理参数、模块嵌套支持及模型保存),然后构建你的网络层(层类、层数、每层神经元数量);然后定义前向传播规则(得到初始计算值后如何做,通常加激活函数,返回最终预测值);最后实例化线性模型为model。
1.3 Construct loss and optimizer
# 3. Construct loss and optimizer
criterion = torch.nn.MSELoss(reduction='sum') #创建对象,调用MSELoss类,设置误差求和而非平均
optimizer = torch.optim.SGD(model.parameters(),lr=0.01) #model.parameters()寻找所有待更新参数
选择损失函数及优化器
根据问题类型选择损失函数,这里为MSE均方误差,优化器通常选择SGD。
Think-Help
损失函数的计算方式没有严格要求,但应注意:是否取平均等操作会影响学习率的选择,因为求导后1/N仍然存在,如下图:
θ:=θ−η⋅1N∑i=1N∇θL(f(xi;θ),yi)\theta := \theta - \eta \cdot \frac{1}{N} \sum_{i=1}^{N} \nabla_\theta L(f(x_i;\theta), y_i) θ:=θ−η⋅N1i=1∑N∇θL(f(xi;θ),yi)
1.4 Train cycle
# 4. Train cycle
for epoch in range(1000):#前向传播y_pred = model(x_data)loss = criterion(y_pred,y_data) #实例化对象print(epoch,loss.item())#反向传播optimizer.zero_grad() #清空上一次计算的梯度(否则梯度会累加)loss.backward() #自动计算每个参数的梯度optimizer.step() #更新参数
进入训练周期
从这里可以明显看出该线性模型使用All(传统随机梯度下降GD,即使用一组样本进行一次参数更新),首先前向传播:计算最终预测值、损失函数并输出;然后反向传播:梯度清空、计算当前梯度、参数更新。
print("w = ",model.linear.weight.item()) #.item() 把张量里的数值提取为普通的Python数字
print("b = ",model.linear.bias.item())x_test = torch.Tensor([[4.0]])
y_test = model(x_test)
print("y_pred = ",y_test.data) #.data:返回张量的实际数据部分
#tensor.data 仍然是张量(Tensor),但它不再追踪梯度,也不在计算图中
最后进行测试及所需其它操作。
二、逻辑斯蒂回归
2.1 问题讲解
有趣的是,Logistics回归虽然叫回归,但实际是一种二分类方法,简单来说,它相比线性回归只增添了一个Sigmoid函数,将线性回归的输出值代入Sigmoid中实现分类。
σ(x)=11+e−x\sigma(x) = \frac{1}{1 + e^{-x}} σ(x)=1+e−x1
如图所示:

故无论线性回归输出值是什么一定能将其转为(0,1)范围之间,将连续值转化为概率值实现分类。
同时,需要一起变化的还有损失函数,最常用的二分类(y=0/1)损失函数即为BCELoss(Binary Cross Entropy Loss,二元交叉熵损失函数),对于单个样本:
L(y,y^)=−[ylog(y^)+(1−y)log(1−y^)]L(y, \hat{y}) = - \left[ y \log(\hat{y}) + (1 - y) \log(1 - \hat{y}) \right] L(y,y^)=−[ylog(y^)+(1−y)log(1−y^)]
对于N个样本取平均损失:
BCE Loss=−1N∑i=1N[yilog(y^i)+(1−yi)log(1−y^i)]\text{BCE Loss} = -\frac{1}{N} \sum_{i=1}^{N} \left[ y_i \log(\hat{y}_i) + (1 - y_i) \log(1 - \hat{y}_i) \right] BCE Loss=−N1i=1∑N[yilog(y^i)+(1−yi)log(1−y^i)]
Think-Help
用于记录当前模型输出的概率与真实标签的差距,为什么能做到呢?
首先要明确通常预测y值指的是预测为正类的概率值,即:
y^=P(y=1∣x)\hat{y} = P(y = 1 | x) y^=P(y=1∣x)
则:
L=−log(1−y^),y=0L=−log(y^),y=1L=-log(1-\hat{y}),y=0\\ L=-log(\hat{y}),y=1 L=−log(1−y^),y=0L=−log(y^),y=1
也就实现了预测正确的概率值越大,损失越小。
2.2 代码实践
在代码中,仅设计模型处多加一个Sigmoid函数,损失函数换为BCELoss即可。
# 1、Design model using Class
class LogisticRegressionModel(torch.nn.Module):def __init__(self):super(LogisticRegressionModel, self).__init__()self.linear = torch.nn.Linear(1,1)def forward(self, x):y_pred = torch.sigmoid(self.linear(x)) # 此处加了sigmoid函数,对初始输出值进行sigmoid处理return y_pred
model = LogisticRegressionModel()# 2、Construct loss and optimizer
criterion = torch.nn.BCELoss(size_average=False) # Key:是否取均值影响学习率设置:Loss是否乘以1/N——Loss对参数的梯度是否乘以1/N
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)三、DataLoader完整流程
在前两节我们的参数更新方法都是All(传统GD),但在第Ⅰ章我们提到了最常用的是Mini-Batch方法,如何实现呢?就要使用DataLoader。
3.1 python组件间关系
补充一下python基本知识点——组件间的关系
程序库 Library(比如 PyTorch)├── 包 Package(torch、torch.nn、torch.utils)│ ├── 模块 Module(torch.nn.functional)│ │ ├── 类 Class(Linear, MSELoss 等)│ │ └── 函数 Function(sigmoid(), relu() 等)│ └── 子包 Subpackage(torch.utils.data)└── ...
在 PyTorch 中,DataLoader 属于 数据加载模块(torch.utils.data) 下的一个类(Class)。
3.2 Prepare Dataset
定义类进行完善的数据处理是个好习惯。
# 1.Prepare Dataset
class DiabetesDataset(Dataset):def __init__(self, filepath):xy = np.loadtxt(filepath, delimiter=',', dtype=np.float32, skiprows=1) # 第一行为标题列,无法转浮点型self.len = xy.shape[0] # 查看第一列,即有多少个样本self.x_data = torch.from_numpy(xy[:, :-1])self.y_data = torch.from_numpy(xy[:, [-1]])'''Think-Helpxy——numpy数组 形状:(样本数,特征数+1)xy[:, :-1] 取所有样本的前N-1列,即所有特征xy[:, [-1]] 取所有样本的第N列,即标注值torch.from_numpy 即将numpy数组转为pytorch张量,共享内存(不新建,一改具改)。注:xy[:, -1]和xy[:, [-1]]不同,前者是一维数组,后者仍是二维矩阵。'''def __getitem__(self, index):return self.x_data[index], self.y_data[index]def __len__(self):return self.len'''Think-HelpMagic Method——魔法方法,即带有双下划线的方法,定义:不会被直接调用,隐式自动触发例:执行model = LinearModel()后,自动调用__new__ and __init__Python 的设计哲学:Everything is an object'''
dataset = DiabetesDataset('./dataset/pima-indians-diabetes.csv') #文件链接:https://github.com/Xueyouing/Study-Naturally
train_loader = DataLoader(dataset=dataset, batch_size=32, shuffle=True, num_workers=4)
注意最后一行,从传入参数也可以看出DataLoader决定mini-batch中样本数量,是否打乱及并行方式。
3.3 Design model using class
# 2.Design model using class
class Model(torch.nn.Module):def __init__(self):super(Model, self).__init__()self.linear1 = torch.nn.Linear(8, 6)self.linear2 = torch.nn.Linear(6, 4)self.linear3 = torch.nn.Linear(4, 1)self.sigmoid = torch.nn.Sigmoid()def forward(self, x):x = self.sigmoid(self.linear1(x))x = self.sigmoid(self.linear2(x))x = self.sigmoid(self.linear3(x))return xmodel = Model() #实例化
神经网络对应形式(从第一个隐含层开始输入值都要经过激活函数Sigmoid计算):

3.4 Construct loss and optimizer
# 3.Construct loss and optimizer
criterion = torch.nn.BCELoss(reduction='mean')
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
Think-Help
torch.optim.SGD的名字虽然叫 “Stochastic Gradient Descent”,但它并不强制你一个样本一个样本地更新。Saying again:是否使用 mini-batch(小批量样本), 其实是由 你怎么喂数据(DataLoader) 决定的,而不是优化器。
3.5 Train cycle
# 4.Train cycle
if __name__ == '__main__':for epoch in range(100):for i,data in enumerate(train_loader, 0): inputs, labels = datay_pred = model(inputs)loss = criterion(y_pred, labels)print(epoch, i, loss.item())optimizer.zero_grad()loss.backward()optimizer.step()'''
Think-Help
if __name__ == '__main__':当该脚本被直接执行时运行。这里是为了防止trainloader报错。
enumerate返回索引i及数据值data,其中data又分为(inputs,labels)
0指从第0批次开始。
'''
很关键的不同点,第二层循环即指代每个epoch分批量使用数据集进行参数更新。
四、多分类问题
4.1 问题讲解
对于多分类问题,自然仍先要找到适合它的损失函数。
首先要明确分类问题的两个条件:最终各类别概率值大于0;各类别概率值之和等于1。
我们可以先回顾一下二分类问题的求解过程:输出层得到一个输出值,代入Sigmoid函数得到P(y=1|x)的概率值,P(y=0|x)=1-P(y=1|x),满足要求,损失函数可以计算。
而多分类如何满足呢?输出层不止一个结点,会得到多个输出值。
显然,仍将输出值都代入Sigmoid函数无法满足要求,而另一个函数却可以——Softmax函数:
P(y=i)=ezi∑j=0K−1ezj,i∈{0,...,K−1}P(y = i) = \frac{e^{z_i}}{\sum_{j=0}^{K-1} e^{z_j}}, i \in \{0, ..., K - 1\} P(y=i)=∑j=0K−1ezjezi,i∈{0,...,K−1}
其中z便是输出值,将全部K个值都带入,会得到一个”值都大于0且K个值和为1的分布“。
得到概率值后,如何计算损失呢?
Loss=−log(y^c)\text{Loss} = -\log(\hat{y}_c) Loss=−log(y^c)
其中yc表示预测正确类别的概率,概率值越高,损失越小。
Think-Help
二分类和多分类的损失函数实际是一样的,都是取预测正确类别的概率进行-log(),以实现**“预测正确的概率值越高,损失越小”**。
思路讲解完毕,来看具体实现。

图释:输出值,经过Softmax函数得到概率值,对应乘以独热编码后,只剩下了-log(yc)一项。
整体流程叫做交叉熵损失函数(CrossEntropyLoss),而-log(yc)叫做负对数似然损失(NLLLoss,Negative Log Likelihood Loss)。
二者的关系为:CrossEntropyLoss = Softmax + NLLLoss。
Think-Help
在实际编程时,你会看到log_softmax函数,如下:
log_probs = F.log_softmax(logits, dim=1) loss = F.nll_loss(log_probs, target)不要惊讶,这是因为考虑到数值稳定性(不会出现
exp(大数)或log(接近 0)的溢出问题),要将softmax和log共同进行:
log(ezi∑jezj)=zi−log(∑jezj)\log\left(\frac{e^{z_i}}{\sum_j e^{z_j}}\right) = z_i - \log\left(\sum_j e^{z_j}\right) log(∑jezjezi)=zi−log(j∑ezj)
而nll_loss实际只起到了取值并取负的操作。
4.2 代码实践
本节实践是经典手写数字图像MNIST数据集,要求识别0-9的多分类问题。
流程仍是四部曲,重点在于使用到了图像识别的专用工具和操作,已在代码中详细注释。
import torch
from torchvision import transforms # 图像预处理
from torchvision import datasets # 图像数据集加载
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim# 1.Prepare dataset
batch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))])
'''
ToTensor将图片转为张量,Normalize将其像素值转为[0, 1]区间(标准化)
(0.2307,) 是整个数据集中所有像素的 平均值(mean);
(0.3081,) 是所有像素的 标准差(std);
Because:神经网络更喜欢正态分布数据【加快收敛速度、防止某些特征主导模型、保持激活函数在有效区间工作等】
'''
train_dataset = datasets.MNIST(root='../L_Pytorch/dataset', train=True, download=True, transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = datasets.MNIST(root='../L_Pytorch/dataset', train=False, download=True, transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)# 2.Design model using class
class Net(torch.nn.Module):def __init__(self):super(Net, self).__init__()self.l1 = torch.nn.Linear(784, 512)self.l2 = torch.nn.Linear(512, 256)self.l3 = torch.nn.Linear(256, 128)self.l4 = torch.nn.Linear(128, 64)self.l5 = torch.nn.Linear(64, 10)def forward(self, x):x = x.view(-1, 784) # 获得batch_size,摊平图片维度x = F.relu(self.l1(x))x = F.relu(self.l2(x))x = F.relu(self.l3(x))x = F.relu(self.l4(x))return self.l5(x)model = Net()# 3.Construct loss and optimizer
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5) # 动量使收敛更快、更稳定:每次参数更新时,有 50% 的“惯性”来自上一次的梯度方向。# 4.Train cycle
def train(epoch):running_loss = 0.0for batch_idx, data in enumerate(train_loader, 0):inputs, targets = dataoutputs = model(inputs)loss = criterion(outputs, targets)optimizer.zero_grad()loss.backward()optimizer.step()running_loss += loss.item()if batch_idx % 300 == 299: # 下标从0开始print(f"[{epoch+1}, {batch_idx+1:5d}] loss: {running_loss/300:.3f}")running_loss = 0def test():correct = 0total = 0with torch.no_grad(): # 测试无需更新参数,故不用计算梯度for data in test_loader:images, labels = dataoutputs = model(images)_, prediction = torch.max(outputs.data, dim=1)'''Think-Helptorch.max(tensor, dim=1):在指定维度 dim=1 上求最大值。返回两个结果: 第一维是最大值;第二维是最大值所在的位置(索引 index)。我们取概率值最大的类别索引,只关心类别索引而不关心概率值。'''total += labels.size(0) # labels是长度为size的一维张量,每次加上当前批次(batch)的样本数量correct += (prediction == labels).sum().item()print(f'Accuracy: {correct/total}')if __name__ == '__main__':for epoch in range(10):train(epoch)test()
恭喜你!又成功小试牛刀!你已经对四部曲有了深刻印象,这是很好的基础!同时可以自己设计基础神经网络并应用到简单的回归分类任务中去!
接下来让我们学习当下最流行的神经网络架构!
第Ⅲ章 渐入佳境
一、初识CNN

1.1 输入层(Input Layer)
卷积神经网络(Convolutional Neural Networks,CNN) 是一种专门用来处理图片(或具有空间结构数据) 的神经网络。
一般来说,当今图片分为像素图和矢量图,前者由一个个像素方格组成,一个像素格代表[0, 255]的亮度值,于是,一张黑白图片便是一个数字矩阵。
为什么说是黑白图片呢?
因为,RGB 彩色图片有三个通道,分别存红、绿、蓝三种颜色分量。现在,你可以有一双“黄金瞳”,将一张普通彩色图片视为三个矩阵堆叠在一起。

1.2 卷积层(Convolution Layer)
首先,介绍一个关键概念——Kernal(卷积核):也就是小矩阵,用作窗口在大矩阵上滑行,进行计算操作。

接下来,我将操作流程定义为一个**卷积层操作公式**:
卷积层操作=多组运算=B∗多通道运算=B∗(C∗卷积运算)卷积层操作 = 多组运算 = B*多通道运算 = B*(C*卷积运算) 卷积层操作=多组运算=B∗多通道运算=B∗(C∗卷积运算)
其中,B为输出通道数量,C为输入通道数量。
紧接着,我依次解释上述三种运算:
卷积运算:以Kernal为窗口遍历当前输入矩阵——将Kernal内元素与当前输入矩阵窗口内元素对应相乘,再相加得到一个数字,即为输出矩阵的一个对应位置元素,遍历完成即填满输出矩阵。

多通道运算:以C个Kernal对C个通道(即C个输入矩阵)分别进行卷积运算,得到C个输出矩阵,将C个矩阵对应元素相加得到一个新矩阵,即为最终矩阵。

多组运算:以B组Kernal(每组C个Kernal)进行相应多通道运算得到B个最终矩阵,即为B个特征图(Feature maps),也称为有B个通道。

Think-Help
操作中关键的参数主要有4个:输出通道数B,输入通道数C,矩阵高H,矩阵宽W。
从公式或图片亦或定义中不难看出:B决定多通道运算次数,最终想要多少个通道(多少个矩阵),就做多少次多通道运算;C决定卷积运算次数,给定输入有多少个通道,就必须做多少次卷积运算。
而矩阵的高和宽(H和W)分为卷积前后,主要取决于Kernal的大小。
设输入矩阵为A * A,Kernal为a * a,输出矩阵为X * X。(因矩阵通常为方阵,故如此假设)关系如下:
X=A−(a//2)∗2X = A-(a//2)*2 X=A−(a//2)∗2
其中,//为整除符号。不难理解:输出矩阵X上下左右都要减去Kernal边长的一半。
1.3 池化层(Pooling Layer)
池化层的主要目的是对特征图进行下采样(subsampling),也就是“缩小尺寸、保留重要信息”。
池化操作是对一个局部区域取代表值,有两种操作方式:
| 类型 | 计算方法 | 含义 |
|---|---|---|
| 最大池化 Max Pooling | 取区域内最大值 | 提取最强特征(常用) |
| 平均池化 Average Pooling | 取区域内平均值 | 平滑特征(早期网络使用) |
其中,最大池化操作如下图:

Think-Help
值得注意:池化仅改变矩阵尺寸(即H和W),不改变通道数。
同时补充两个十分重要的参数:padding(填充)和stride(步幅),虽然在池化层补充,但这两种操作在卷积层和池化层都可以做。
padding
在卷积层我们提到:输出矩阵会根据Kernal大小减少不同程度的边长,也就是损失了边缘信息。如果我们不想损失这些信息,如何做呢?
自然地,在边缘补充一圈0,即输入矩阵上下左右都多了一行或一列。
如下图,本来5 * 5的输入矩阵边长要减去2【2*(3//2)】变为3 * 3,但是将其扩充一圈变为7 * 7,这样,输出矩阵仍为5 * 5。
stride
表示卷积核或池化窗口 每次移动的步长,stride=2的情况如下图:
注:池化的主要目的是“压缩尺寸”,通常窗口之间不重叠,所以通常让步长等于窗口大小最自然。


1.4 激活层(Activation Layer)
处理图像数据,加入非线性特征也是至关重要的。
ReLU(Rectified Linear Unit)是目前 CNN 中最常用的激活函数:
f(x)=max(0,x)f(x)=max(0,x) f(x)=max(0,x)
原因:计算简单、收敛更快、不容易梯度消失。
1.5 全连接层(Fully Connected Layer,FC Layer)
“卷积层是特征提取器,全连接层是分类器。”
保留特征图(Feature maps)形式,是没有办法判断最终类别滴,仍然需要“展平”(Flatten),将其变为一维向量,便于建立类别映射(如下),计算输出概率值。
yj=f(∑iwijxi+bj)y_j = f\left( \sum_i w_{ij} x_i + b_j \right) yj=f(i∑wijxi+bj)
二、深入CNN
2.1 Inception Block
在学习完卷积神经网络常见的层次结构后,我们同样需要将其“组装”起来,以往我们学习到的神经网络设计模式都是线性,也就是将层次顺序链接起来,但实际应用中,往往需要功能更为复杂的设计模式,如下图(出自论文 《Going Deeper with Convolutions》,即 GoogLeNet,这是 Google 在 2014 年提出的经典结构)。

其中我们勾画出一个多种层次路线混合的模块(称为Inception 模块),不同的是,这些层次路线是并行的而非串行。
Inception 模块是一种特殊的卷积块(block),它的核心思想是:
“给定多种选择让网络自己决定使用哪种卷积核尺寸来提取特征,而不是我们人为设定一个固定的卷积核。”
Think-Help
为什么这么设计?
传统 CNN(比如 LeNet、AlexNet)在每层卷积中,只使用固定大小的卷积核(例如全是 3×3)。
但问题是:
- 小卷积核(1×1、3×3)→ 适合捕捉局部特征;
- 大卷积核(5×5)→ 能看见更全局的模式;
- 池化 → 帮助降维并提取主要特征。
Google 团队就想:“既然不同大小的卷积核提取的信息不同,那我为什么不在一层里全部用上,然后再让网络自己学到该重视哪种特征?”
于是 Inception 结构就诞生了。
将层次并行,不同层次路线得出的结果最后如何整合呢?
按照通道(Channels)维度拼接结果,注意另外两个维度(H和W)自然必须一致。相当于把不同尺度的信息融合在一起,得到一个更强的综合特征表示。

2.2 简化运算
观察上面图片,你会发现有许多1 * 1的卷积层(Kernal尺寸为1 * 1),代入卷积层运算思考一下,这有必要吗?
似乎在提取特征方面没什么用,输出矩阵的尺寸没变,输出通道取决于你想要多少通道。那为什么还用呢?
简化运算!时间复杂度过高一直是CNN的痛点,如下图使用1 * 1的Kernal会极大减少运算量(参照1.2自己算一遍哦)。

本质上就是中间进行一次通道缩小。
2.3 梯度消失
设计好模式,在训练和测试时我们可能会遇到这样的情况:

可能有两个问题:过拟合【test error > train error & 56-layer > 20-layer】 和 梯度消失【56-layer > 20-layer,56-layer出现梯度消失导致模型无法得到有效训练】。
过拟合暂不多说,需要减少模型layer、增大惩罚项等操作;CNN的重点在于梯度消失,由于模型层数过多很可能导致梯度消失。
Think-Help
梯度消失和鞍点问题的区别
我们在第Ⅰ章提到过,神经网络的棘手问题是鞍点问题,为应对这个问题提出了SGD(随机梯度下降)和Mini-Batch(小批量梯度下降)。
而我们现在谈的是梯度消失,二者区别在于:
- 鞍点问题指的是在反向传播过程中可能会偶然遇到**
一个梯度**接近于0;- 而梯度消失问题指的是在反向传播过程中**
多个梯度**(小于1)相乘,导致越往前传播梯度越小,最终几乎为 0,使早期层无法有效更新。二者区别要尤其搞清,为应对梯度消失问题我们提出了几种方法(第1种前面1.4提到过,本节我们主要看第二种):
- 使用ReLU等非饱和激活函数(避免Sigmoid、tanh饱和区间造成梯度趋近0);
- 引入残差结构(Residual Connections),如ResNet,使梯度能直接跨层传播。
- 优化权重初始化方法(如Xavier或He初始化);
- 采用批量归一化(Batch Normalization) 来稳定梯度分布。
引入残差结构ResNet,如下图所示:

先看左侧传统网络(Plain net):输入x经过两层带权重的线性变换和非线性激活后,得到输出 H(x)。
再看右侧残差网络(Residual net,简称ResNet):输入x一方面进入普通的卷积层(两层 Weight Layer 加 ReLU),生成F(x);另一方面,被直接跳跃连接到输出端。
ResNet提出了一种新思想:让网络学习“残差”而不是直接学习映射。残差定义为:
F(x)=H(x)−xF(x)=H(x)−x F(x)=H(x)−x
这里的“残差”不同于损失函数中的残差,因为它是映射函数输出减去输入而非真实y值,事实上我们也没法减去真实y值,ResNet在中间层而非输出层。
映射函数便为:
H(x)=F(x)+xH(x)=F(x)+x H(x)=F(x)+x
这样做为什么可以解决梯度消失问题?
很容易理解——ResNet结构中求梯度时绝对值永远大于等于1:
∂H(x)∂x=∂F(x)∂x+1\frac{\partial H(x)}{\partial x}=\frac{\partial F(x)}{\partial x} +1 ∂x∂H(x)=∂x∂F(x)+1
这样,反向传播时再也不怕梯度消失啦!
三、实战CNN
待补充
四、初识RNN
循环神经网络(Recurrent Neural Network,RNN) 是一种专门处理序列数据的神经网络。
其最大的特点/优势就是**“记忆”**——能够结合之前的信息进行思考。
如下图所示,一组序列按照时间步依次输入RNN Cell,而每个RNN Cell都需要结合序列输入x和先前信息h进行下一步输出。

Think-Help
RNN的特殊样本
**在RNN中,一个样本(sequence)是一个时间序列。**序列按照时间步有多个元素,可能是一句话中的一个单词,可能是股价序列中的某一天:
x1,x2,…,xTx_1,x_2,…,x_T x1,x2,…,xT
每个时间步输入一个 x_t,RNN 输出一个 h_t。如:如果你在做语言模型,序列是词序列 [x1=“我”,x2=“喜欢”,x3=“学习”]。这里 x1,x2,x3 是不同时刻的输入(每个可能是词向量)。
4.1 前向传播
具体的前向传播计算图及公式如下:

Think-Help
RNN的特殊权重
RNN 模型本身就只有一组参数(权重矩阵):
Wxh:输入→隐藏Whh:隐藏→隐藏Why:隐藏→输出W_{xh}:输入 → 隐藏\\ W_{hh}:隐藏 → 隐藏\\ W_{hy}:隐藏 → 输出 Wxh:输入→隐藏Whh:隐藏→隐藏Why:隐藏→输出
具体来说,同一样本中,不同时间步共享同一组参数(每个RNN Cell内部的参数都相同);不同样本间也共享参数。简单来说,整个模型就一组参数。
关于每个Cell中的参数类型,由任务类型决定。
多对多:对于每一步都要输出的任务,Cell中三个参数都有,如时序预测(股价每天都预测下一天)。
多对一:对于只需要最后一步输出的任务,前面的Cell中只有W_xh和W_hh,如情感分类(整句话 → 一个情绪标签)。
4.2 反向传播
RNN中的反向传播被称作BPTT(Backpropagation Through Time)。
***初步理解:***相对于BP,BPTT中损失对参数的梯度求解时多考虑了“时间”因素。
∂L∂Whh=∑t=1T∂L∂ht⋅∂ht∂Whh\frac{\partial L}{\partial W_{hh}} = \sum_{t=1}^{T} \frac{\partial L}{\partial h_t} \cdot \frac{\partial h_t}{\partial W_{hh}} ∂Whh∂L=t=1∑T∂ht∂L⋅∂Whh∂ht
这部分还是看实例更好理解(完整实例计算过程Xueyouing/Study-Naturally):

如果该序列时间步长是3呢?
那就需要再加上一个损失函数对W_hh的导数:
∂L∂Whh=∂L∂h3⋅∂h3∂h2⋅∂h2∂h1⋅∂h1∂Whh\frac{\partial L}{\partial W_{hh}} \; = \frac{\partial L}{\partial h_3} \cdot \frac{\partial h_3}{\partial h_2} \cdot \frac{\partial h_2}{\partial h_1} \cdot \frac{\partial h_1}{\partial W_{hh}} ∂Whh∂L=∂h3∂L⋅∂h2∂h3⋅∂h1∂h2⋅∂Whh∂h1
***直观上理解:***从1到N所有时间步长的RNN Cell都用到了W_hh,然后输出了相应的h_t,一步步传递,才得出最终输出值及损失值,最终要更新这个参数,不得求出每个Cell中的梯度再求和。
4.3 更新方式
4.3.1 逐个样本训练(单样本模式)
最原始的训练方式是:每次取一个完整序列——RNN 在时间上展开——做完前向、反向传播——更新参数——再取下一个样本。
流程伪代码:
for sample in dataset:h = 0for x_t in sample:h = RNNCell(x_t, h)loss = compute_loss(h, target)loss.backward()optimizer.step()
该方法效率太低,无法利用 GPU 并行。
4.3.2 mini-batch 训练(常用方式)
现代训练都是 mini-batch 模式——我们把多个样本(序列)组成一个 batch,一起前向传播、一起反向传播、再一起更新参数**【每个batch更新一次参数】**。
假设 batch_size=2,每个序列长度=3:
| 时间步 | 样本1输入 | 样本2输入 |
|---|---|---|
| t=1 | x₁₁ | x₂₁ |
| t=2 | x₁₂ | x₂₂ |
| t=3 | x₁₃ | x₂₃ |
训练时:
- 前向:同时处理两个序列,每个时间步共享参数;
- 反向:梯度沿时间轴回传,并在 batch 维度求平均;
- 更新:优化器对共享权重更新一次。
伪代码:
for batch in data_loader:optimizer.zero_grad()outputs, hidden = model(batch_inputs)loss = criterion(outputs, targets)loss.backward() # 所有样本 + 所有时间步的梯度累积optimizer.step() # 更新一次参数
五、深入RNN
5.1 多分类问题
将RNN用于多分类问题:

和之前将全连接层构建的线性回归模型转为多分类模型思路一致:在其输出后加入交叉熵损失函数(CrossEntropyLoss),转为输出各类别概率值。
5.2 双向传播
对于一个序列(以一句话为例),传统做法是根据语句正向传播信息得到结果,语义的逆向是否也存在有价值的信息呢?
RNN还可以进行双向传播(序列正反方向各走一遍):

该隐藏层输出为:
hidden=[hNf,hNb]hidden=[h_N^f,h_N^b] hidden=[hNf,hNb]
5.3 GRU
5.3.1 GRU的提出
对于RNN,BPTT时很容易导致梯度消失或爆炸,使模型难以记住长序列信息。
Think-Help
RNN的特殊问题
我们先回顾一下梯度消失和爆炸两种情况:
在所有神经网络中,反向传播的梯度更新都要用链式法则:
∂L∂W=∂L∂hn⋅∂hn∂hn−1⋅∂hn−1∂hn−2⋅…⋅∂h1∂W\frac{\partial L}{\partial W} = \frac{\partial L}{\partial h_n} \cdot \frac{\partial h_n}{\partial h_{n-1}} \cdot \frac{\partial h_{n-1}}{\partial h_{n-2}} \cdot \ldots \cdot \frac{\partial h_1}{\partial W} ∂W∂L=∂hn∂L⋅∂hn−1∂hn⋅∂hn−2∂hn−1⋅…⋅∂W∂h1
如果每一步的梯度范数 > 1 → 会越来越大(梯度爆炸);
如果每一步的梯度范数 < 1 → 会越来越小(梯度消失)。注:先前我们并未提过梯度爆炸,因梯度消失更常见且更难解决。
而RNN相对MLP(全连接层)、CNN(卷积)神经网络更易梯度消失或爆炸,为什么?
RNN 的“时间展开”导致乘法次数极多
RNN的BPTT中,序列长度基本等价于层数。同一个权重 W_hh 会被在所有时间步重复使用。
例如一个长度为 100 的序列,RNN 展开后就是 100 层的“共享权重网络”:
ht=f(Whhht−1+Wxhxt)h_t = f(W_{hh}h_{t-1} + W_{xh}x_t) ht=f(Whhht−1+Wxhxt)
反向传播时梯度链路是:
∂L∂Whh∝∏t=1T∂ht∂ht−1\frac{\partial L}{\partial W_{hh}} \propto \prod_{t=1}^{T} \frac{\partial h_t}{\partial h_{t-1}} ∂Whh∂L∝t=1∏T∂ht−1∂ht
这里的乘法次数 T(时间步长度)通常比 CNN 或 MLP 的层数大得多,比如 50、100、甚至几百。RNN 的循环结构容易形成“指数放大/衰减”
记得4.1我们曾说过:整个RNN只有/共享一组参数。这意味着每次传播都会乘上同一个权重矩阵 W_hh。
假设 W_hh 的最大特征值为 λ,那么梯度大致会按 ∣λ∣^T 变化。
- 如果 ∣λ∣<1,梯度趋于 0 → 梯度消失
- 如果 ∣λ∣>1,梯度呈指数增长 → 梯度爆炸
因为这种循环乘法在时间维度上持续发生,所以即使权重稍有不合适,也可能导致数值不稳定;而其它网络∣λ∣可能大于1可能小于1,会有所抵消。
5.3.2 GRU思想
于是人们提出了改进版 —— GRU(门控循环单元)【Gated Recurrent Unit = 有门的循环单元】
首先给定完整公式:
zt=σ(Wzxt+Uzht−1)更新门rt=σ(Wrxt+Urht−1)重置门h~t=tanh(Whxt+Uh(rt⊙ht−1))候选新状态ht=(1−zt)⊙ht−1+zt⊙h~t最终输出\begin{aligned} z_t &= \sigma(W_z x_t + U_z h_{t-1}) && \text{更新门} \\ r_t &= \sigma(W_r x_t + U_r h_{t-1}) && \text{重置门} \\ \tilde{h}_t &= \tanh(W_h x_t + U_h (r_t \odot h_{t-1})) && \text{候选新状态} \\ h_t &= (1 - z_t) \odot h_{t-1} + z_t \odot \tilde{h}_t && \text{最终输出} \end{aligned} ztrth~tht=σ(Wzxt+Uzht−1)=σ(Wrxt+Urht−1)=tanh(Whxt+Uh(rt⊙ht−1))=(1−zt)⊙ht−1+zt⊙h~t更新门重置门候选新状态最终输出
接下来,我们据此讲解其思路:
由前两个公式不难看出,更新门和重置门的公式格式一致:新输入x和上一步隐藏层输出(后面将其叫做“先前信息”)分别乘以相应权重。
所以要从二者用途(也就是后两个公式)来区分不同:
- 候选新状态:重置门越大,先前信息占比越大。
- 最终输出:更新门越大,新状态占比越大。
于是,这两个“门”对应的作用可以这样说:
- 重置门(reset gate) — 决定“要不要遗忘过去”
- 更新门(update gate) — 决定“要不要更新记忆”
六、实战RNN
首先需要了解RNN常见参数:
| 参数名称 | 含义 | 作用 |
|---|---|---|
| input_size | 每个时间步输入向量的维度 | 例如:如果每个时间步输入一个词向量,则为词向量长度 |
| hidden_size | 隐藏层神经元数量(隐藏状态维度) | 控制网络的“记忆容量”与建模能力 |
| num_layers | RNN 堆叠的层数 | 决定网络深度(多层RNN输出上层输入) |
| output_size | 输出层神经元数量 | 取决于任务类型:分类、预测、回归等 |
| seq_len | 序列长度(时间步数量) | 决定每次输入序列的时间跨度 |
| batch_size | 每次训练输入的样本数 | 控制并行训练规模 |
| dropout | 随机丢弃比例 | 防止过拟合(在层与层之间使用) |
| bidirectional | 是否为双向RNN | True表示同时考虑正向和反向序列信息 |
Embedding(将元素转为向量)
面对不等长序列,需要填充0,如下图所示:

而这些 0 是不必要进行计算的,于是引入一种更高效的方式——PackedSequence:

恭喜你!到这里你洞悉了最经典的CNN、RNN神经网络,这是处理图片、文本等非结构化数据的基石。下面,我们将以实践为导向,追溯到近年来具有划时代意义的AI大模型。