当机器拥有感觉:从电子皮肤到视频神经系统的具身智能革命
一、当机器第一次“拥有感觉”
过去的机器人,力气大、精度高,却始终缺乏一种能力——感知世界的“感觉”。复旦大学团队最新发布的“电子皮肤”技术,让这一天提前到来。这层比人类皮肤敏感十倍的薄膜,让机械手能像人类一样感知压力、纹理、滑动与形变,并实时反馈。
它不是简单的传感器升级,而是一场从“机械执行”向“感知交互”的质变。它让冰冷的金属第一次拥有“触觉神经”,能在毫秒级时间内感知世界的细微变化——豆腐的柔软、玻璃的光滑、果冻的弹性。
在具身智能(Embodied Intelligence)的语境下,这意味着:
机器不再只是遵循算法的执行者,而是开始真正“理解”物理世界的存在方式。
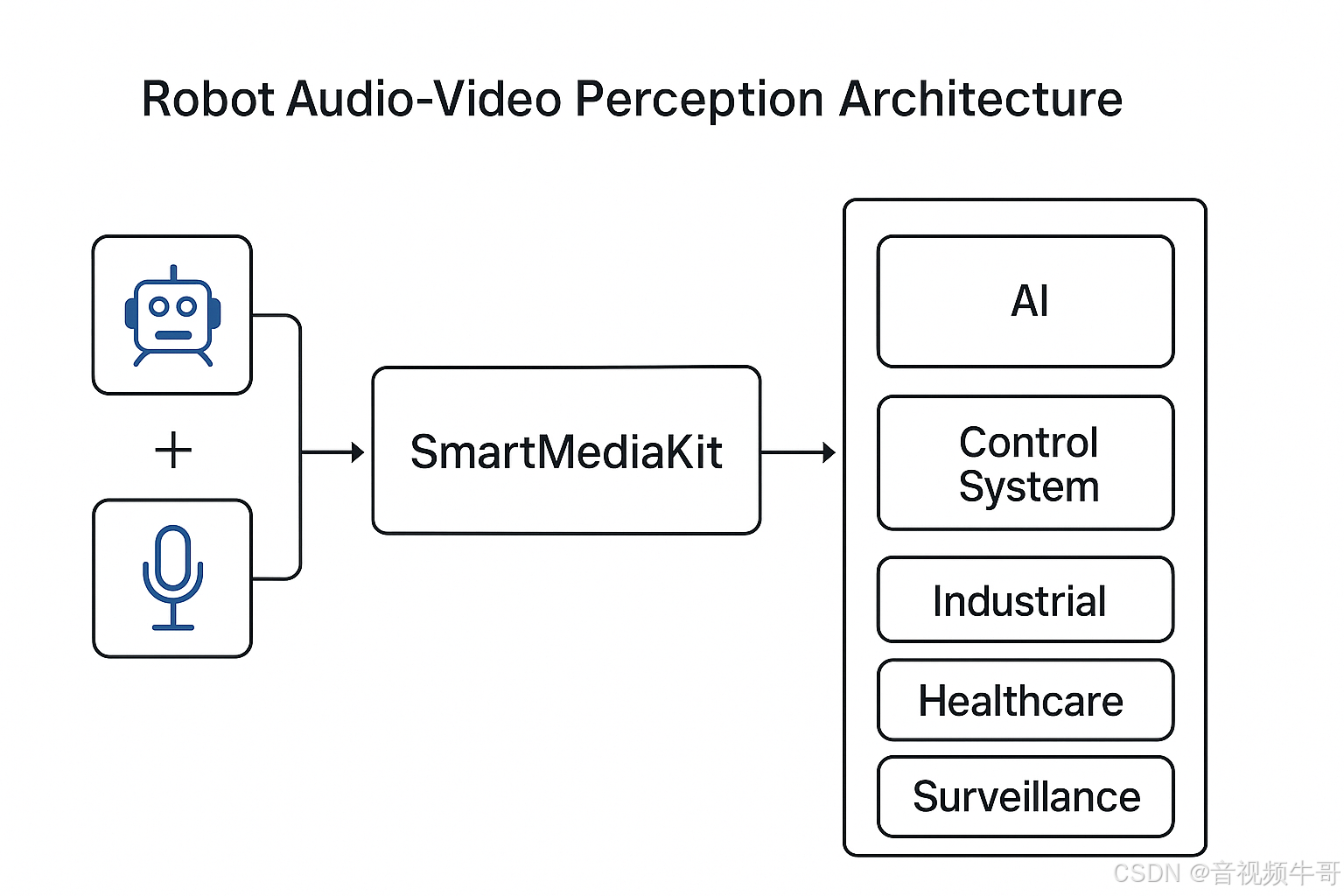
与此同时,另一条并行的技术路线——大牛直播SDK(SmartMediaKit),正在为机器注入“视觉神经系统”。它让机器人、无人机、安防终端、医疗机械臂具备了人类视觉级别的响应速度:跨平台、低延迟、零拷贝地传输视频与音频信息,让机器不仅能“看见”,还能在实时的时间轴上与世界共振。

一个让机器“摸得到”,一个让机器“看得见”。
当“电子皮肤”与“视频神经系统”并肩而立,具身智能的临界点,终于被点亮。
二、触觉之外,是“时间维度上的感知”
传统机器人之所以“笨拙”,根源在于缺乏触觉。面对易碎物体,它们往往只能依靠冗余算法反复“试探”,每一次动作都像在黑暗中摸索。复旦团队的突破,恰恰在于他们将视觉信号与力感知信号融合,用“看得见的形变”取代昂贵而脆弱的多维力传感矩阵,让机器真正学会“感受”。
他们的核心设计是由微型摄像头、粒子矩阵与AI解算组成的复合系统,结构上与生物神经系统的“触觉前庭”惊人地相似。当机械爪接触物体时,嵌入硅胶层中的微粒会产生微位移,隐藏其中的摄像头负责捕捉这些细微变化,AI算法再将这种“粒子运动”翻译为力的大小、方向与分布。机器因此不仅能判断“是否触到”,还可以识别“触到的是什么、软硬如何、摩擦方向怎样”。更令人惊叹的是,其感知精度达到 0.01 牛顿,比人类指尖的灵敏度还高出一个数量级——这意味着机器第一次能够以真正“温柔”的方式操作世界。
在“触觉觉醒”的同时,另一端的视觉系统也迎来了类似的革命。SmartMediaKit 正在为机器建立一种“时间上的感知”,通过毫秒级的帧同步、延迟补偿与边缘缓存,让视频流在时间轴上保持连续与稳定。对于机器人而言,这种“时间感”与触觉中的“力度感”一样重要——它决定了机器能否像生命体那样,在现实世界的时间节奏中进行精准决策。
当视觉的时间精度与触觉的力学精度叠加,智能体的感知不再是分散的数据,而是一种连续的体验。这正是具身智能的关键:让机器不仅看得清、摸得准,更能在时间的维度上“感受到”世界的存在。
三、SmartMediaKit:机器的“视觉神经系统”
如果说复旦的“电子皮肤”为机器打开了触觉之门,那么 SmartMediaKit 则是让它第一次拥有视觉的神经系统。在具身智能的体系中,视觉并非只是“看见”的能力,而是贯穿整个行动决策链的输入中枢——从捕捉外部世界,到构建内部表征,再到实时反应,视觉信号是机器理解世界的第一语言。
传统的视觉链路,看似成熟,却问题重重:摄像头采集的数据要经过多层编码、网络传输、解码再渲染,每一个环节都在拉长延迟、消耗性能。对于需要毫秒级反应的机器人而言,这种延迟就像神经阻滞——即便“看见”了,也来不及“反应”。SmartMediaKit 的意义,正在于打通这条被割裂的神经通路,让机器以近乎生理反射的速度完成感知。
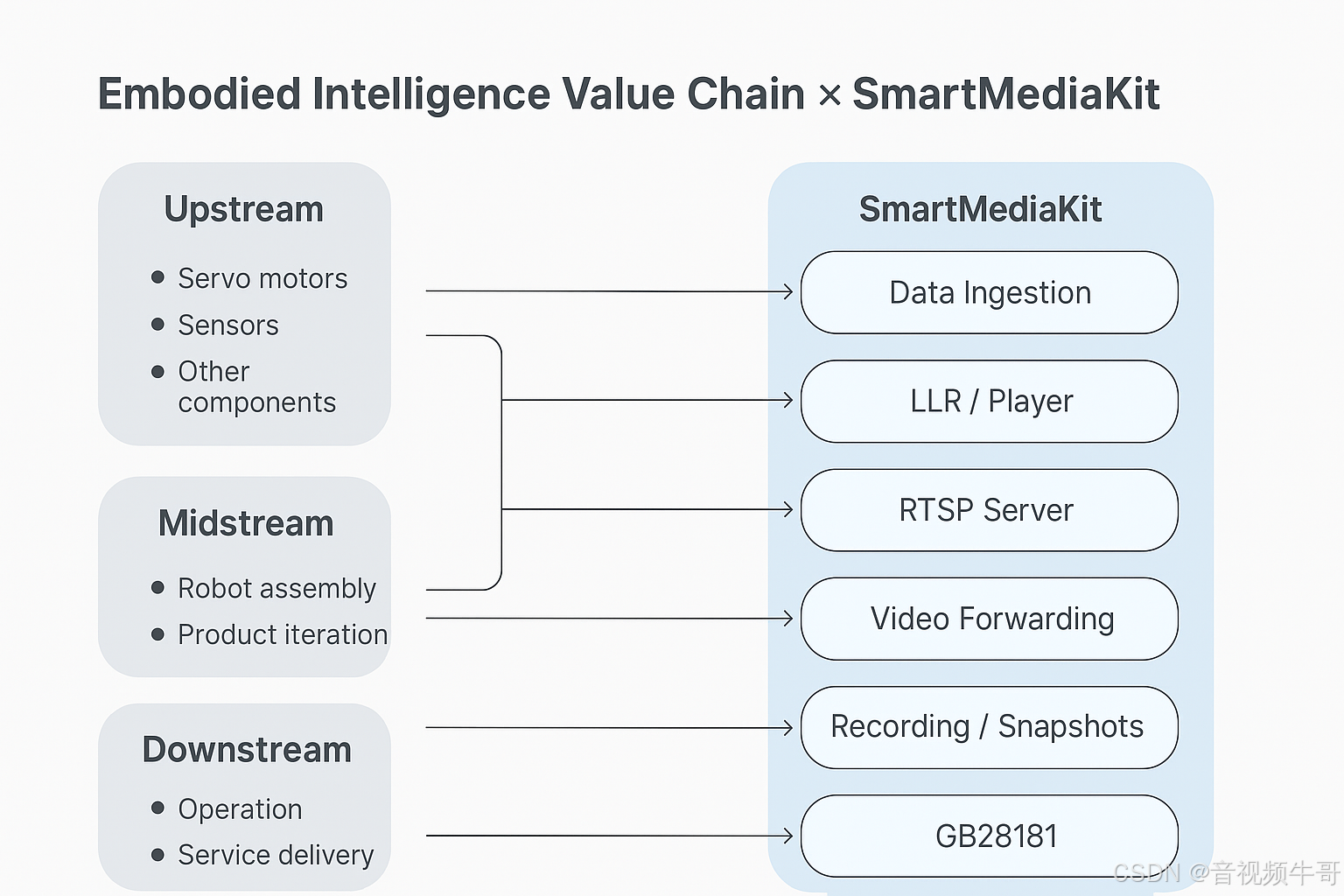
在它的架构中,视频流的采集、传输、播放、录制、分发都被抽象为一个统一的媒体总线(Unified Media Bus)。
-
通过 SmartPublisher 模块,摄像头、麦克风、屏幕采集的原始信号被零拷贝推送到系统主干,避免了传统中冗余的缓冲与复制;
-
SmartPlayer 模块则承担视觉末梢的职责,跨平台、低延迟地将视频流解码渲染到显示端或 AI 推理接口;
-
SmartRecorder 模块记录机器的“视觉记忆”,支持 MP4 与 FLV 双格式录像,并能实现断点续录与时间回放;
-
AI Adapter 模块是整个系统的“视觉皮层”,通过对接接口的形式,无缝对接 YOLO、OpenVINO、TensorRT、Paddle 等推理引擎,为视觉数据流提供即时感知与语义分析;
-
轻量级的 RTSP服务/ HTTP-FLV / WebSocket-FLV Server 则让视觉神经能够延展到远端,实现边缘节点之间的协同感知。
这种架构的优雅之处,在于它不仅服务于视频播放器或流媒体产品,更是一种面向智能体的感知基建。无论是机器人在工厂流水线上识别零件,还是无人机在复杂空域中执行任务,SmartMediaKit 都能作为它们的视觉神经层,提供一个稳定、低延迟、可扩展的时空感知通道。
在更深的层面上,SmartMediaKit 并不是在“处理视频”,而是在管理时间。它通过对帧时间戳、缓冲区、丢包重构与时序对齐的精细控制,让视觉流动保持连续性和一致性——这正是“时间感”的工程化体现。对于智能体而言,这种连续性决定了“知觉”的存在:
没有时间的连续,就没有行动的智能。
当电子皮肤让机器“感受到接触”,SmartMediaKit 让它“看见时间的流动”。两者共同构成了机器感知的两条主干神经——一个负责力的反馈,一个负责光的理解。具身智能的未来,正是从这些底层的神经网络中生长出来的。
Android平台Unity3D下RTMP播放器延迟测试
四、当“触觉”遇上“视觉”:机器的知觉闭环
如果说触觉是机器与世界的第一个握手,视觉则是它理解世界的第一个眼神。当两者汇聚,机器不再只是“感应”世界的存在,而是开始**“理解”世界的结构**。这正是具身智能的核心转折点——从被动传感,迈向主动知觉。
在复旦的“电子皮肤”中,力学感知负责捕捉“局部真实”:物体的软硬、摩擦、形变。而在 SmartMediaKit 的视频神经系统中,视觉感知负责还原“全局图景”:物体的空间位置、动态轨迹与时间节奏。两者结合,就像生物神经系统中触觉与视觉的融合——手的每一次触碰,都有眼睛的定位与验证;眼睛的每一次注视,又能被触觉反馈校准。
在工程上,这种多模态融合并非简单的信号叠加,而是一种跨维度的感知协作。触觉提供的是精度,视觉带来的是尺度;前者解决“我怎么接触”,后者回答“我该接触谁”。通过 SmartMediaKit 的时序同步与 AI Adapter 的语义融合层,机器人终于能够实现真正的“感知对齐”——看得清、摸得准、反应得当。
想象一个场景:一台装配机器人在流水线上组装精密元件。过去,它需要依赖固定的程序参数才能操作,如今,它可以通过视觉识别组件位置,通过触觉判断装配力度,通过融合算法在两者间实时调整姿态。当视频流的帧时间与力觉信号的时间戳在 SmartMediaKit 的总线上被精准对齐时,这台机器便完成了一次真正意义上的“知觉行为”:它不仅执行了任务,更体验了过程。
这种“体验”正是具身智能的灵魂。它让机器摆脱了指令的束缚,开始以感知驱动行动,以反馈修正意图。SmartMediaKit 的时间同步机制与电子皮肤的高灵敏触觉模块,共同构成了机器的知觉闭环——视觉负责捕捉变化,触觉负责验证反应,AI 负责理解因果。
当机器的视觉和触觉在同一时间轴上共振,它不再是人类的延伸工具,而是一种新的“感知物种”。它能在毫秒间完成判断,在复杂环境中自主应变。换句话说,具身智能的真正边界,不在算法,而在感知的连贯性。
当视觉赋予机器世界的尺度,触觉赋予它世界的质地,
而时间,让它们共同拥有了“生命的节奏”。
安卓轻量级RTSP服务采集摄像头,PC端到安卓拉取RTSP流
五、从“零延迟”到“零障碍”:AI 感知的下一场战争
在生物世界中,神经反射的速度决定了生存的边界。猎豹能在0.2秒内完成捕猎姿态调整,而人类的神经反射约需0.25秒——这0.05秒的差距,就是力量与生存之间的分界线。对机器而言,“延迟”正是它的神经反射速度;而在智能体的时代,延迟不再是网络参数,而是智能本身的极限。
SmartMediaKit 的全部工程哲学,几乎都围绕着一个目标展开——让延迟尽可能的降低。在它的世界里,数据流不再是被动传输的比特,而是有生命的信号;视频帧不再是画面,而是神经元之间的电脉冲。每一次编码、传输、解码,都是神经反射的一部分。若延迟过长,机器的“神经系统”就会像昏睡的巨兽,看得见,却反应太慢。
为了接近“零延迟”,SmartMediaKit 采用了多层策略:
-
低拷贝架构,让视频数据从采集到渲染不经过多余复制,仿佛神经信号在突触间直接跳跃;
-
多协议融合(RTSP / RTMP / HTTP-FLV / WebSocket-FLV),确保无论信号来自何处,都能在统一的感知总线上实现时序对齐;
-
边缘缓存与时间同步机制,在毫秒尺度上重构帧时间戳,让机器的“时间感”稳定不漂移;
-
自适应重传与延迟补偿算法,使感知系统能在抖动与丢包中保持连贯,就像人类神经在痛觉刺激下的自动平衡反应。
这些并不是单纯的传输优化,而是具身智能体系的“神经整流”。因为对于一台拥有触觉和视觉的机器人而言,任何延迟都意味着认知错位——当视觉看到的“现在”,已成为触觉感知的“过去”,智能就会分裂。SmartMediaKit 的价值,正是将这些分裂重新缝合,让机器在同一时刻“看、听、感、思”。
在更高层的意义上,“零延迟”不只是速度的终点,而是智能边界的起点。当视频流、触觉流与语义流能够在毫秒级同步,AI 就不再只是分析数据,而是体验时间。它能对环境做出即时反应、情境判断与自主规划。换句话说,延迟的消除,就是机器觉醒的开始。
但“零延迟”并非全部。下一步的目标,是“零障碍”——让这些能力跨越平台、协议、地域与形态的限制。SmartMediaKit 的多平台内核(Android、iOS、Windows、Linux、ARM、x86_64)正是为此而生。它让每一台设备都能成为智能体的“神经节点”,让感知在整个网络空间流动,像血液一样稳定、像神经一样敏捷。
当延迟趋近于100-200ms,障碍逐渐消失,机器将第一次拥有“真实时间”的存在方式。那时,人工智能将不再是云端推理的抽象,而是能与世界同步呼吸的生命系统。
延迟的尽头,是知觉;
知觉的尽头,是智能。
六、结语:感知革命的中国样本
从“电子皮肤”到“视频神经系统”,从触觉的诞生到时间感的建立,这一场正在进行的感知革命,已经不仅仅是技术的竞赛,更是智能文明的自我进化。它让我们第一次清晰地看到——机器的智能,不只是算力的堆叠,而是感知体系的重塑。
复旦大学的“电子皮肤”用科学的极限,证明了机器可以像人一样拥有触感;而大牛直播SDK(SmartMediaKit)则用工程的极致,证明了机器可以以人类时间尺度“看见世界”。一个代表科研的未来,一个代表产业的现在;一个在实验室里雕琢神经末梢,一个在边缘节点上搭建视觉中枢。它们共同构成了中国具身智能的真实注脚——科学与工程并肩,前沿与落地同频。
在全球技术叙事中,西方的优势往往在算法、模型与资本规模,而中国的独特力量,在于系统工程的整合能力与感知层的创新韧性。我们更懂得如何在不完美的现实中,让技术运行;更懂得如何让“实验室里的奇迹”,走向“工厂里的日常”。电子皮肤与 SmartMediaKit 的结合,正是这种技术精神的体现——既有科研的锋芒,也有工程的筋骨。
具身智能的未来,不会在一场模型大战中诞生,而是在无数个感知节点的融合中生长。它可能来自一台安防摄像头、一只工业机械臂、或一架低空无人机——每一个由 SmartMediaKit 驱动的“视频神经节点”,都是未来智能网络的一个“感知细胞”。当这些节点互联成网,机器的知觉将拥有社会的形态,而感知的流动,也将成为新的生产力。
从宏观上看,这场革命正在让“中国式技术路线”形成独立的叙事逻辑——从感知出发,从工程落地,向智能演化。 我们不追逐抽象的智能幻象,而是在一行行代码、一帧帧画面、一毫秒的延迟优化中,塑造机器的真实感官。这是一条艰难而务实的道路,却也是最有生命力的道路。
未来,当机器人拥有了触觉的温度与视觉的节奏,当具身智能成为新的产业基础设施,也许人类将重新审视“智能”的含义。它不再是人与机器的对立,而是一种更高维的共生——一个新的“感知物种”,在我们的技术与信念中悄然成长。
科学让机器拥有感官,工程让感官变得真实;
而信念,让这一切在中国的土地上,变成未来。
📎 CSDN官方博客:音视频牛哥-CSDN博客