[无人机sdk] AdvancedSensing | 获取实时视频流 | VGA分辨率
第五章:高级感知
在第四章:相机模块/云台模块中,我们学会了如何控制无人机相机拍照录像,以及通过云台调整拍摄角度。这对于捕捉特定瞬间非常有用,但如果无人机需要**实时观察和理解周围环境呢?
想象你需要无人机自主导航、避障或生成区域3D地图。这些高级任务仅靠拍照是不够的,你需要实时、连续的视频信息流,包括深度感知能力
这就是**高级感知(AdvancedSensing)**模块的用武之地。它如同为无人机装上了能实时传输视频、感知深度并详细理解周边环境的"眼睛",其能力远超普通相机。
什么是"高级感知"?(无人机的智能视觉系统)
AdvancedSensing模块是连接无人机高级感知能力的桥梁,尤其适用于M210 V2和M300系列等先进无人机,提供高保真视觉数据流。
可以这样理解:
- 普通相机负责拍照,
CameraModule帮你按下快门 AdvancedSensing则持续传输视频流,提供原始或处理后的立体图像,甚至生成有助于理解深度和3D场景结构的数据
为什么需要AdvancedSensing?
高级机器人应用需要的不只是静态图像,它们需要:
- 实时视频流:像飞行员通过FPV(第一人称视角)相机那样持续监控环境
- 立体视觉:许多大疆无人机配备多摄像头(如人眼般的"双目"系统)来计算深度。
AdvancedSensing让能获取这些原始图像或预处理深度信息(视差图) - 空间信息:通过立体数据,应用可以构建3D点云、计算物体距离,实现高级导航或检测
- 解码功能:无人机原始视频流通常采用H264等压缩格式。
AdvancedSensing包含将这些流解码为标准图像格式(如RGB)的工具,便于应用处理
前文传送:[GICP] 点云数据结构 | 点云配准 | KD树 | 常见树状搜索结构_kd树点云配准
该模块对需要环境感知的应用至关重要,例如:
- 避障(超越内置传感器能力)
- 3D建模与重建
- 视觉里程计
- 高级物体检测与追踪
AdvancedSensing核心功能
该模块提供多项强大功能:
| 功能 | 描述 | 示例数据 |
|---|---|---|
| H264视频流 | 获取不同相机(FPV、主相机等)的实时压缩视频流 | 原始H264帧、解码后的RGB图像 |
| 立体图像流 | 从立体摄像头对(如前视、下视)获取原始或校正图像 | 左右灰度图像(VGA或240p分辨率) |
| 视差图 | 从立体图像计算深度信息,显示物体距离 | 像素灰度值代表深度的灰度图 |
| 解码与处理 | 内置工具将H264视频转为标准图像格式,处理原始立体图像缓冲 | RGB矩阵、OpenCV的Mat对象 |
首个感知任务:获取实时视频流
让我们从获取无人机FPV(第一人称视角)相机的实时视频流开始。这相当于开启无人机的"行车记录仪"并将画面传输到计算机。
首先确保Vehicle对象已就绪(如第一章:飞行器所示)。关键是在设置LinuxSetup(或其他平台的等效项)时需明确启用高级感知功能。
#include <dji_vehicle.hpp>
#include <dji_linux_helpers.hpp>
#include <dji_advanced_sensing.hpp> // 高级感知模块
#include <iostream>
#include <vector> // 图像数据存储// 可选:引入OpenCV显示图像
// #include "opencv2/opencv.hpp"// 定义回调函数,当新RGB图像就绪时触发
void processFPVImage(DJI::OSDK::CameraRGBImage img, void* userData) {std::string cameraName = "FPV_CAM";if (userData) {cameraName = std::string(reinterpret_cast<char*>(userData));}std::cout << "#### 获取新RGB图像来自: " << cameraName<< " - 分辨率: " << img.width << "x" << img.height << std::endl;// 实际应用中可在此处理'img'// 例如使用OpenCV:// #ifdef OPEN_CV_INSTALLED// cv::Mat mat(img.height, img.width, CV_8UC3, img.rawData.data(), img.width * 3);// cv::cvtColor(mat, mat, cv::COLOR_RGB2BGR); // 转换RGB为OpenCV的BGR格式// cv::imshow(cameraName, mat);// cv::waitKey(1);// #endif
}int main(int argc, char** argv) {// 重要:在设置中启用高级感知bool enableAdvancedSensing = true;DJI::OSDK::LinuxSetup linuxEnvironment(argc, argv, enableAdvancedSensing);DJI::OSDK::Vehicle* vehicle = linuxEnvironment.getVehicle();if (vehicle == NULL) {std::cout << "飞行器未初始化,退出。\n";return -1;}// 假设已完成激活(如第一章所示)// DJI::OSDK::ACK::ErrorCode activateAck = vehicle->activate(...);// ... 错误检查 ...// 设置相机流ACM设备路径(通常用于Linux系统的M210V2)// 对于M300可能非必需,或内部处理方式不同const char *acm_dev = linuxEnvironment.getEnvironment()->getDeviceAcm().c_str();vehicle->advancedSensing->setAcmDevicePath(acm_dev);
第一步:启动相机视频流
现在,我们指示AdvancedSensing模块开始传输FPV相机视频流。通过提供processFPVImage回调函数,SDK知道将解码后的图像发送到哪里。
// ... main函数内设置完成后 ...char fpvCamName[] = "FPV_CAM_Stream";std::cout << "启动FPV相机视频流...\n";bool streamResult = vehicle->advancedSensing->startFPVCameraStream(&processFPVImage, &fpvCamName);if (!streamResult) {std::cout << "开启FPV相机流失败!退出。\n";return -1;}std::cout << "FPV相机流已启动。图像将通过回调处理。\n";// 让视频流运行几秒sleep(10); // 根据需要调整时长
第二步:停止相机视频流
完成图像采集后,最好停止视频流以释放资源。
// ... main函数内视频流运行后 ...std::cout << "停止FPV相机视频流...\n";vehicle->advancedSensing->stopFPVCameraStream();std::cout << "FPV相机流已停止。\n";// 可选:短暂延迟确保所有线程正确关闭sleep(1);return 0;
}
获取立体图像(VGA分辨率)
更高级的感知应用可能需要直接访问无人机立体摄像头图像(如前视立体摄像头对)。这些通常是VGA(640x480)或240p(320x240)的灰度图像。
以下是订阅前视立体VGA图像的示例:
// ... (包含头文件、main函数、飞行器设置、激活、acm_dev路径同前) ...// 此回调接收原始VGA立体图像数据
// 实际应用中需进一步解码/处理(如计算视差图)
void processStereoVGAImages(DJI::OSDK::Vehicle *vehiclePtr, DJI::OSDK::RecvContainer recvFrame, DJI::OSDK::UserData userData) {if (recvFrame.recvInfo.cmd_id == DJI::OSDK::AdvancedSensingProtocol::PROCESS_VGA_CMD_ID) {auto stereoVGAImg = recvFrame.recvData.stereoVGAImgData;std::cout << "收到立体VGA图像 - 帧序号: " << stereoVGAImg->frame_index<< ", 时间戳: " << stereoVGAImg->time_stamp << std::endl;// stereoVGAImg->img_vec[0] 包含左图原始数据// stereoVGAImg->img_vec[1] 包含右图原始数据// 这是480x640的灰度图像(uint8_t缓冲区)// 通常在此使用OpenCV创建cv::Mat对象// 并进行校正、视差计算等处理}
}// ... main函数内 ...std::cout << "订阅前视立体VGA图像(20Hz)...\n";
// '20'表示期望频率(Hz)
vehicle->advancedSensing->subscribeFrontStereoVGA(20, &processStereoVGAImages, NULL);sleep(15); // 运行一段时间std::cout << "取消订阅VGA图像...\n";
vehicle->advancedSensing->unsubscribeVGAImages();// ... main函数其余部分 ...
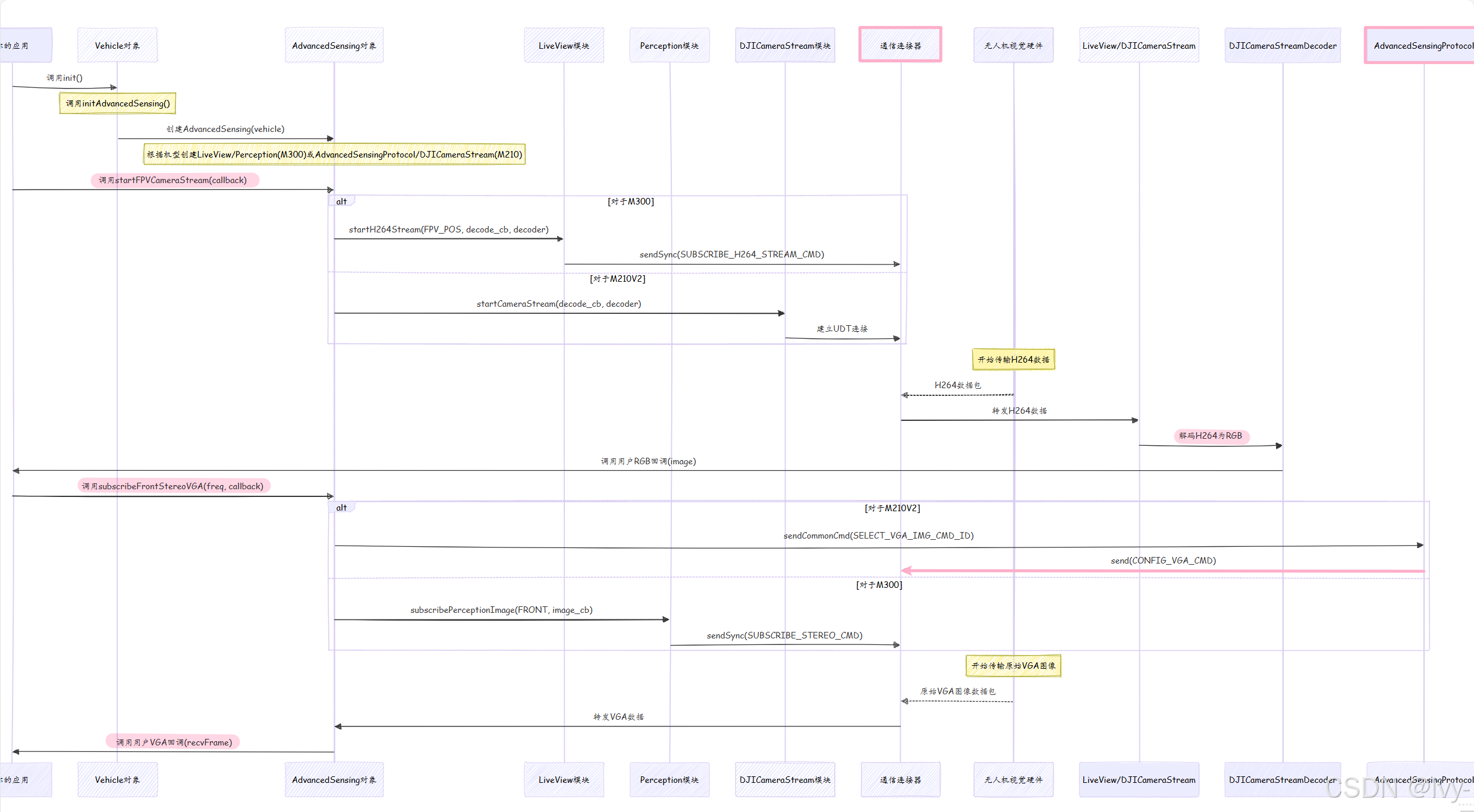
内部机制:AdvancedSensing如何"看见"
AdvancedSensing模块是管理多数据流和无人机专用硬件的复杂协调器,通过底层连接器(Linker)(见第一章:飞行器)与不同感知组件通信。
AdvancedSensing数据流
当请求高级感知流时,以下是简化的处理流程:
结论
AdvancedSensing模块赋予无人机应用强大的实时视觉能力。
- 提供实时视频流、原始/处理后的立体图像和深度信息访问,它让无人机能"看见"并"理解"环境,实现高级自主任务。
掌握如何订阅这些数据流并通过回调处理,是构建智能无人机应用的关键步骤。
现在我们的无人机已具备环境感知能力,接下来让我们探索如何管理它能发送的各类数据
下一章:数据订阅