数字阵列雷达(三)——系统工作原理(接收)
接《数字阵列雷达(二)——系统工作原理(发射)https://blog.csdn.net/m0_37751247/article/details/153770969?spm=1011.2124.3001.6209》,下面,我们分析数字阵列雷达系统的接收信号流程,见图1、图2所示。
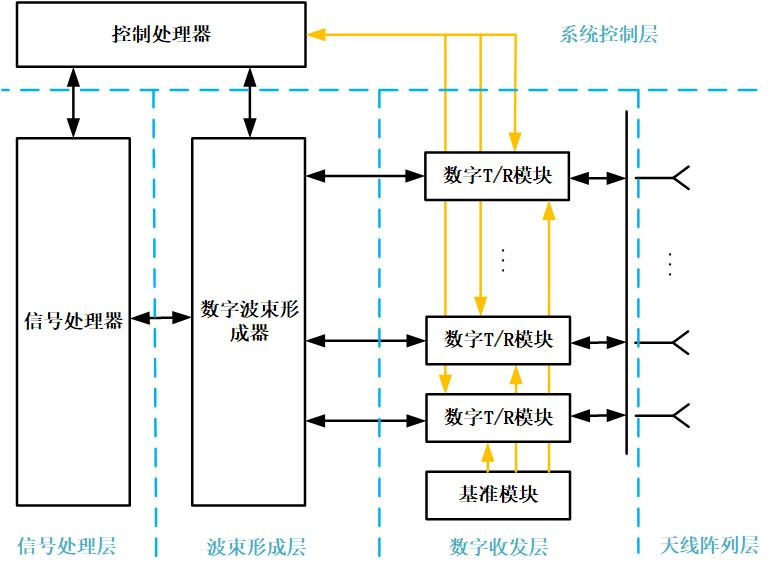
图1 数字阵列雷达简易结构框图
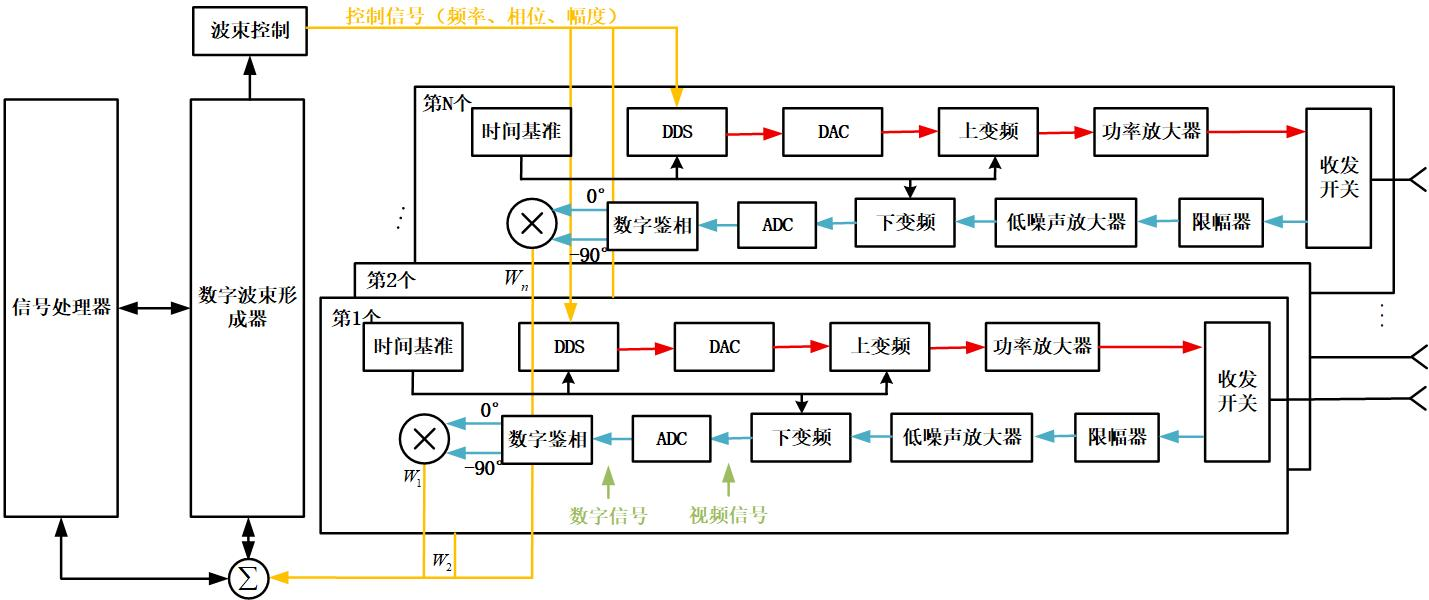
图2 数字阵列雷达系统的一般组成框图
接收流程:
在接收时,N个数字T/R组件接收阵列天线对应阵元的射频回波信号。经过限幅器与低噪声放大器(LNA)对信号进行限幅放大,抑制噪声干扰;经下变频形成中频信号,对中频信号进行A/D采样和数字鉴相后输出正交的I/Q数字信号。多路数字 T/R 组件输出的大量回波信号数据通过高速数据传输系统,例如低压差分传输器(LVDS)或光纤传输系统,最后送至数字波束形成器和实时信号处理器,数字波束形成器完成单波束、多波束形成以及自适应波束形成,实时信号处理器完成软件化信号处理,例如脉冲压缩、动目标显示(MT)、动目标检测(MTD)和脉冲多普勒(PD)信号处理。
接收流程的目标是从空间接收目标回波信号,抑制干扰与噪声,提取目标的距离、速度、角度等参数,可细分为以下7个关键步骤:
1. 天线接收与低噪声放大(数字收发层前端)
天线阵元接收目标反射的回波信号(功率通常为-100dBm至-130dBm,极其微弱),同时可能混入干扰信号(如敌方电子干扰)与杂波信号(如地面、海面反射)。限幅器可以有效防止敌方强电子干扰烧穿雷达内部电子器件设备,降低对电子器件的影响。
为避免信号被噪声淹没,回波信号首先送入低噪声放大器(LNA)放大。LNA的核心指标是噪声系数(NF),通常需控制在1-2dB(噪声系数越低,接收灵敏度越高),同时需具备足够的线性度(三阶交调点IP3≥10dBm),避免强干扰信号导致失真。
2. 下变频(数字收发层执行)
放大后的射频回波信号通过混频器与本振信号混频,下变频至中频(与发射流程的中频一致,便于后续统一处理)。下变频过程中,通过镜像抑制滤波器抑制镜像频率干扰,确保仅目标频段的信号进入后续链路。
下变频后的中频信号经带通滤波器(BPF)滤波,进一步抑制带外干扰,滤波器的带宽需匹配发射信号的带宽(如1GHz带宽信号对应1GHz滤波器)。
3. 模数转换(ADC)(数字收发层核心)
滤波后的模拟中频信号送入模数转换器(ADC),转换为数字中频信号。ADC是接收链路的“瓶颈”,其性能直接决定雷达的接收动态范围与信号保真度:
采样频率:需≥2倍中频信号带宽(如2GHz带宽信号需4GSps ADC);
有效位数(ENOB):通常14-16位,动态范围可达84-96dB,确保同时接收微弱回波与强干扰信号而不失真;
采样时钟:需与发射端的DAC时钟同步(同步精度≤1ns),避免相位误差影响波束形成精度。
4. 数字正交解调(波束形成层预处理)
接收波束形成后的数字中频信号需通过数字正交解调转换为基带I/Q信号(同相分量与正交分量),便于后续信号处理。解调过程通过数字混频与低通滤波实现,解调后的I/Q信号保留了原信号的幅度与相位信息。
5. 数字波束形成(接收加权)(波束形成层核心)
各通道的数字信号送入FPGA,执行接收数字波束形成。与发射波束形成不同,接收DBF更注重“自适应干扰抑制”,通常采用自适应波束形成(ABF)算法,如最小均方误差(MMSE)算法、采样矩阵求逆(SMI)算法。
对于多目标场景,FPGA可通过并行处理生成多个独立接收波束,分别指向不同目标,实现多目标同时跟踪。
6. 目标信号处理(信号处理层核心)
对I/Q基带信号执行一系列高阶处理,提取目标信息,核心步骤包括:
(1)脉冲压缩
通过与发射信号匹配的数字滤波器对I/Q信号进行脉冲压缩,将宽脉冲信号压缩为窄脉冲,提升距离分辨率。以LFM信号为例,压缩后的脉冲宽度约为,距离分辨率
(c为光速)。例如,2GHz带宽信号的距离分辨率可达7.5cm,可区分近距离的多个目标。
(2)恒虚警率(CFAR)检测
在噪声背景下,通过CFAR算法(如单元平均CFAR、有序统计CFAR)设定自适应阈值,区分“目标信号”与“噪声/杂波”,控制虚警率(通常为10⁻⁶-10⁻⁸),避免误判。
(3)参数估计
距离估计:根据目标回波的延迟时间计算距离
,延迟时间通过脉冲压缩峰值的位置确定,精度可达采样周期的1/10(如1GSps采样率下精度为0.1ns,对应距离精度1.5cm);
速度估计:通过多普勒效应计算目标速度,通过对多脉冲回波的相位变化进行傅里叶变换(FFT)提取;
角度估计:通过多个接收波束的幅度比较(比幅法)或相位干涉(比相法),估计目标的方位角与俯仰角,精度可达0.1°-0.01°。
(4)多目标跟踪
采用卡尔曼滤波、粒子滤波等算法,对连续多帧的目标参数进行关联与预测,生成目标航迹,实现对多个运动目标的稳定跟踪(可同时跟踪数十至数百个目标)。
7. 数据输出与交互(系统控制层收尾)
处理后的目标航迹数据(距离、速度、角度、目标属性等)经系统控制层整合后,通过数据总线(如以太网、光纤)传输至外部指挥控制系统(C4ISR),为决策提供支撑。同时,系统控制层根据目标运动状态,动态调整下一轮发射的波束参数(如调整PRF跟踪高速目标),形成“探测-跟踪-调整”的闭环。