自动驾驶---基于安全走廊的端到端
1 前言
关于大模型的博客,笔者分为了两个系列:车企量产 + 科研论文。希望有兴趣的朋友能够从笔者的大模型博客系列当中收获一些知识或者idea。
车企量产:
《自动驾驶大模型---华为ADS4.0》
《自动驾驶大模型---小鹏汽车VLA大模型》
《自动驾驶大模型---蔚来汽车之NWM》
《自动驾驶大模型---理想汽车下一代MindVLA大模型》
《自动驾驶大模型---小米&华科的ORION端到端方案》
《自动驾驶大模型---轻舟智行的端到端方案》
《自动驾驶大模型---旷视科技之PADriver》
《自动驾驶大模型---商汤之开悟大模型》
《自动驾驶大模型---元戎启行的VLA大模型》
科研论文:
《自动驾驶大模型---SOLVE:视觉语言与端到端的协同》
《自动驾驶大模型---预测&决策&规划的可解释性》
《自动驾驶大模型---香港科技大学之BEVGPT》
《自动驾驶大模型---HE-Drive类人端到端驾驶》
《自动驾驶大模型---小米&华科之DriveMonkey大模型》
《自动驾驶大模型---上海交通大学之DriveTransformer》
《自动驾驶大模型---BEVDriver》
本篇博客介绍一篇论文,通过安全走廊,生成端到端轨迹。关于安全走廊,在运动规划中涉及的比较多,通常用于约束优化问题的求解空间。
2 基于安全走廊的端到端
传统自动驾驶系统通常采用模块化设计(感知-规划-控制),但端到端(End-to-End)方法通过直接学习传感器输入到控制输出的映射关系,简化了流程。然而,端到端方法存在安全性不足的问题,例如对罕见场景的泛化能力差、决策过程不可解释等。本文提出通过走廊(Corridor)学习与规划来增强安全边界,结合学习能力与结构化约束。
2.1 核心方法
走廊定义:走廊被建模为车辆可行驶的安全区域,由几何边界(如车道线、障碍物)和动力学约束(如速度、加速度)共同定义,数学表示为
走廊生成网络:使用深度神经网络从传感器数据(如相机、LiDAR)中预测走廊的几何形状和动态约束。网络输出包括走廊的中心线、宽度变化和安全缓冲区。
走廊约束规划:在走廊内进行轨迹优化,通过二次规划(QP)最小化控制成本函数:
其中为轨迹跟踪误差,
为控制输入的平滑性。
2.2 架构
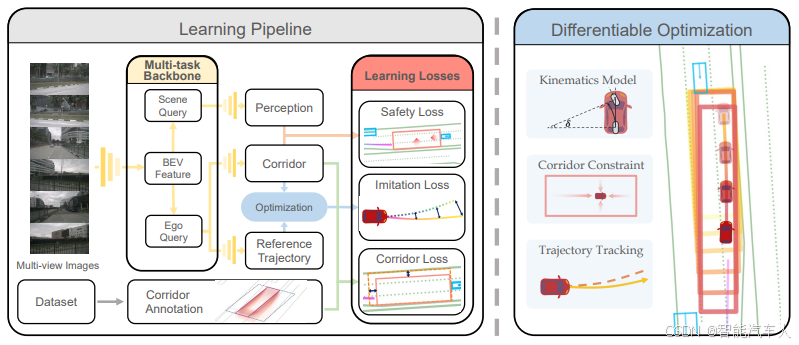
多任务主干网络将多视角图像作为输入进行处理,并输出感知结果、参考轨迹以及可行区域(走廊)。
预测得到的可行区域(安全走廊)由数据集中的标注信息进行监督,并通过安全损失函数进一步优化,以最大限度地减少与其他智能体和路缘的重叠。
基于运动学自行车模型,可微优化模块将可行区域(安全走廊)作为约束条件,旨在跟踪参考轨迹。
最后,对优化后的轨迹进行训练,以模仿人类的驾驶行为。
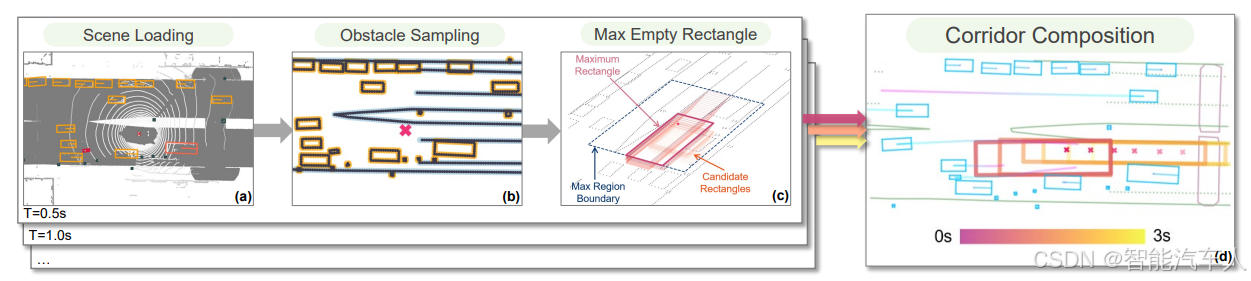
2.3 安全走廊标注
可行区域(走廊)标注过程:
- 从数据集中加载其他智能体的边界框信息和地图数据。
- 对坐标进行采样。
- 识别出最大的矩形,并在上方突出显示,而其他候选矩形则以高透明度显示在地面以下。
- 遍历时间戳并将结果进行组合,从而形成可行区域(走廊)。在鸟瞰图(BEV)中,这些矩形相互堆叠,不同的颜色代表不同的时间戳。
2.4 实验结果
(1)仿真测试
在CARLA模拟器中,与纯端到端方法相比,碰撞率降低47%,紧急制动频率减少32%。
(2)对比实验
基础模型 仅对规划轨迹进行训练。模型
仅使用走廊损失(Lcor)引入了走廊学习。模型
在此基础上进行扩展,融入了辅助损失(Lmap、Lagent 及 Larea)。模型
则利用来自
的参考轨迹与走廊,生成经过优化的最终轨迹。

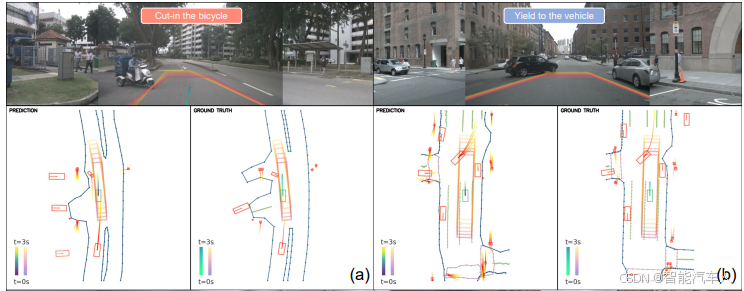
(3)举例说明
对于cut-in的VRU以及Car进行了减速处理。
3 总结
论文所述方法为端到端自动驾驶提供了结构化安全框架,但仍面临长尾场景泛化和实时性优化的挑战。并且对于安全走廊的标注,本身就是一个比较复杂的工作,当然,通过BEV空间的信息,可将其变成自动标注。
参考论文:《Drive in Corridors: Enhancing the Safety of End-to-end Autonomous Driving via Corridor Learning and Planning》