MeshGPT:三角形网格生成的Decoder-Only Transformer范式解析
项目主页:MeshGPT: Generating Triangle Meshes with Decoder-Only Transformers
论文地址:nihalsid.github.io/mesh-gpt/static/MeshGPT.pdf
从机器学习与3D计算机视觉交叉领域的研究视角出发,MeshGPT的核心贡献在于打破了传统3D生成依赖“中间表示后处理”的范式,首次将NLP领域成熟的Decoder-Only Transformer架构与几何感知的表示学习结合,实现了三角形网格的直接、紧凑、高保真自回归生成。本文将从问题建模、技术架构、创新突破、实验验证及领域价值五个维度,系统解析其方法论与科学意义。
一、问题背景与动机:3D网格生成的核心挑战
三角形网格作为3D图形学的“原生表示”,具备拓扑结构化、渲染兼容性强、存储效率高的优势,但其生成任务长期面临两大核心挑战,这也是MeshGPT的研究出发点:
1. 现有3D生成范式的固有缺陷
传统3D生成方法多依赖非网格中间表示,需通过后处理(如Marching Cubes、QEM简化)转换为网格,导致不可避免的质量损失:
- 体素(Voxel):受限于网格分辨率,存在“块状伪影”,高分辨率下内存开销爆炸;
- 点云(Point Cloud):缺乏拓扑连接性,转换为网格时需解决点云重建的歧义性(如Poisson重建易产生冗余面);
- 神经场(Neural Field,如SDF):虽支持任意拓扑,但iso-surfacing提取的网格存在过细分(Over-tessellation) 问题(如GET3D生成的椅子含27k+面),且边缘平滑、细节丢失(如桌角变圆)。
2. 直接网格生成的技术瓶颈
现有直接网格生成方法(如PolyGen、AtlasNet)未能有效平衡“拓扑连贯性”与“生成效率”:
- PolyGen:采用“顶点生成→面生成”双自回归网络,但顶点与面的训练分离导致误差累积(顶点生成未考虑后续面的拓扑需求,面生成依赖固定顶点分布);
- AtlasNet/BSPNet:通过2D平面变形或二叉空间分割生成网格,但前者易产生“折叠伪影”,后者生成的网格拓扑过于规则(块状结构),缺乏真实3D资产的不规则 triangulation 模式。
MeshGPT的核心动机即解决上述问题:设计一种端到端的自回归生成框架,直接输出符合人工建模规律(紧凑、 sharp edges、拓扑合理)的三角形网格。
二、模型架构:几何表示学习与自回归生成的协同设计
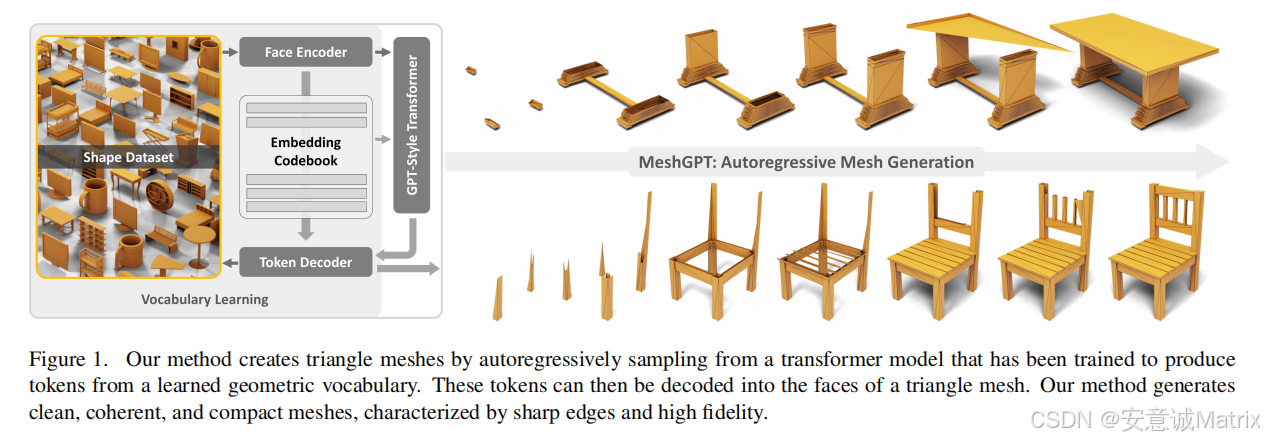
MeshGPT的技术框架分为两大核心模块:几何词汇表学习(Geometric Vocabulary Learning) 与 Decoder-Only Transformer生成,二者形成“表示-建模”闭环,具体架构如图1所示。
1. 几何词汇表学习:从三角形到量化嵌入的表示映射
传统自回归生成若直接使用三角形的9维坐标(3个顶点×3维坐标)作为token,会导致序列长度爆炸(N个面需9N个token) 与 几何信息缺失(未捕捉邻接面拓扑)。MeshGPT通过“图卷积编码+残差量化”构建具有拓扑-几何感知的词汇表,解决这一问题。
(1)图卷积编码器:捕捉局部拓扑-几何特征
为建模三角形网格的邻接关联性,MeshGPT将网格抽象为“面图(Face Graph)”:
- 节点定义:每个节点对应一个三角形,输入特征包括:
- 几何特征:9维顶点坐标(经 positional encoding 增强)、面面积、三边夹角、法向量;
- 拓扑特征:通过邻接矩阵隐式编码(相邻面共享边/顶点);
- 编码器结构:采用堆叠的SAGEConv(GraphSAGE的卷积层),通过“聚合邻接节点特征”实现局部几何-拓扑信息融合,输出每个面的576维特征向量 z i \ z_i zi ∈ R 576 \in R^{576} ∈R576(N个面对应特征矩阵 Z \Z Z ∈ R N × 576 \in R^{N \times 576} ∈RN×576 )。
关键设计意义:不同于独立处理单个三角形,图卷积编码器使嵌入向量蕴含“面与面的依赖关系”(如椅子腿的面与座面的面特征存在关联),为后续生成连贯拓扑奠定基础。
(2)残差向量量化(Residual Vector Quantization, RQ):压缩与离散化
为降低序列长度并实现“词汇表化”,MeshGPT采用深度为D=6的残差量化(而非传统VQ-VAE的单级量化):
- 量化策略:将每个面的576维特征 z i \ z_i zi 按顶点拆分(3个顶点×192维/顶点),对每个顶点特征进行 D / 3 = 2 \ D/3=2 D/3=2 级量化,最终每个面对应6个量化token t i = [ t i 1 , . . . , t i 6 ] \ t_i = [t_i^1, ..., t_i^6] ti=[ti1,...,ti6];
- 代码本更新:采用指数移动平均(EMA)动态更新代码本 C \mathcal{C} C(大小16384),平衡量化精度与更新稳定性;
- 序列长度优化:传统坐标token序列长度为9N,RQ后为6N(D=6),当N=300时序列长度从2700降至1800,适配Transformer的上下文窗口(论文用4608)。
创新点:顶点级量化(Per-Vertex Quantization)而非面级量化,使共享顶点的面具有相似token,进一步强化拓扑连贯性(如桌腿与桌面共享的顶点量化token一致,确保生成时面的连接性)。
(3)ResNet解码器:重建约束与词汇表有效性验证
为确保量化token可准确解码为三角形,MeshGPT设计1D ResNet-34解码器:
- 输入:量化token序列 T = [ t 1 , . . . , t N ] \ T = [t_1, ..., t_N] T=[t1,...,tN](每个token映射为代码本嵌入 e ( t i d ) \ e(t_i^d) e(tid));
- 输出:离散化的9维顶点坐标(空间离散为128³网格,输出坐标的类别分布而非连续值);
- 损失函数:
- 重建损失:交叉熵损失(离散坐标预测),通过“平滑one-hot权重”降低物理邻近坐标的惩罚;
- 承诺损失(Commitment Loss):约束量化嵌入与原始特征的距离,避免量化误差过大。
2. Decoder-Only Transformer:自回归网格生成
基于预训练的几何词汇表,MeshGPT采用GPT-2-medium架构(24层自注意力、16头、768维隐藏层)实现自回归生成,核心设计如下:
(1)序列建模策略
- 序列排序:沿用PolyGen的“顶点索引排序”规则——顶点按z-y-x轴升序排序,面按最小顶点索引排序,确保生成时拓扑的一致性;
- 位置编码:采用双级位置编码:
- 面级编码:标识当前token所属面在序列中的位置;
- 嵌入级编码:标识当前token在面内6个嵌入中的索引(如 t i 1 \ t_i^1 ti1 与 t i 2 \ t_i^2 ti2 的编码不同),解决面内嵌入的顺序歧义;
- 输入序列构造:每个训练样本的序列为 [ <start> , t 1 1 , t 1 2 , . . . , t 1 6 , t 2 1 , . . . , t N 6 , <end> ] \ [\text{<start>}, t_1^1, t_1^2, ..., t_1^6, t_2^1, ..., t_N^6, \text{<end>}] [<start>,t11,t12,...,t16,t21,...,tN6,<end>],模型目标是最大化条件概率 ∏ i = 1 N ∏ d = 1 6 p ( t i d ∣ t < i , t i < d ) \prod_{i=1}^N \prod_{d=1}^6 p(t_i^d | t_{<i}, t_i^{<d}) ∏i=1N∏d=16p(tid∣t<i,ti<d)。
(2)生成推理流程
- 采样策略:采用beam search(beam size=5)平衡生成多样性与质量;
- 后处理:生成的“三角形汤(Triangle Soup)”通过MeshLab合并邻近顶点(阈值1e-4),解决共享顶点的重复问题,形成闭合网格。
三、核心创新:突破3D生成的三大技术瓶颈
MeshGPT在方法论上的创新,直接针对3D网格生成的关键痛点,具体体现在三方面:
1. 表示学习创新:拓扑-几何融合的词汇表
传统方法的token设计(如PolyGen的顶点坐标token)忽略网格的拓扑关联性,而MeshGPT的词汇表具备两大特性:
- 拓扑感知:通过图卷积聚合邻接面特征,使token蕴含“局部连接信息”(如相邻面的token相似度更高);
- 顶点级量化:按顶点拆分特征并量化,确保共享顶点的面具有一致的token前缀,降低生成时的拓扑冲突(如桌腿与座面的连接面不会出现顶点错位)。
2. 生成架构创新:单Decoder-Only的端到端设计
对比PolyGen的“顶点生成+面生成”双网络架构,MeshGPT的单Transformer架构优势显著:
- 消除误差累积:无需先生成顶点再生成面,直接以“面序列”为建模对象,避免顶点分布与面需求不匹配的问题;
- 效率提升:单网络训练与推理的计算开销低于双网络(论文中训练耗时约5天/4×A100,低于PolyGen的多阶段训练)。
3. 质量-效率平衡:紧凑网格的生成范式
MeshGPT生成的网格在“视觉质量”与“存储效率”上实现突破:
- 紧凑性:生成的椅子、桌子面数仅125-291个(远低于GET3D的27k+面、PolyGen的454+面),接近人工建模的面数规模;
- sharp edges保留:通过几何词汇表的局部特征捕捉,避免神经场方法的过平滑问题(如椅子靠背的棱角、桌子的直角边缘清晰)。
四、实验验证:定量与定性的全面突破
论文在ShapeNetV2数据集(55类,聚焦Chair、Table、Bench、Lamp 4类)上进行了系统实验,验证了MeshGPT的优越性。
五、局限性与未来方向
尽管MeshGPT实现了突破,仍存在需改进的方向,这也是3D生成领域的未来研究热点:
1. 现有局限性
- 采样效率:自回归生成速度慢(单网格30-90秒),远低于GAN类方法(如GET3D的秒级生成),受限于Transformer的串行推理;
- 场景级生成:当前仅支持单物体生成,无法处理多物体场景(如“桌子+椅子”的组合),需解决场景拓扑的全局建模;
- 模型规模:采用GPT2-medium(24层),未探索更大模型(如GPT3级)的潜力,可能存在性能上限。
2. 领域价值与未来方向
MeshGPT的方法论为3D生成领域提供了新范式:
- 表示学习启示:证明“结构化表示(如网格)+ 领域感知词汇表”优于“非结构化表示(如点云)”,为其他结构化3D生成(如四面体网格、多边形网格)提供参考;
- 跨模态融合:可扩展至“文本-网格”“图像-网格”生成(如输入“红色圆形桌子”文本,生成对应网格),需结合多模态embedding与几何词汇表;
- 效率优化:结合并行生成技术(如非自回归Transformer)提升采样速度,推动实际应用(如游戏资产实时生成)。
六、总结
MeshGPT作为首个将Decoder-Only Transformer成功应用于三角形网格直接生成的方法,其核心贡献在于:
- 方法论创新:提出“几何词汇表+自回归Transformer”的端到端框架,打破传统3D生成的后处理依赖;
- 技术突破:通过图卷积编码与顶点级量化,解决网格生成的拓扑连贯性与序列长度问题;
- 应用价值:生成的紧凑、高保真网格可直接用于游戏、影视等工业场景,推动3D资产自动化生成的落地。
从机器学习研究视角看,MeshGPT的成功验证了“NLP范式向结构化3D表示迁移”的可行性,为跨模态结构化生成(如3D、视频、图形)提供了重要参考。