手搓二叉平衡搜索树--AVL树(万字长文/图文详解)
////// 欢迎来到 aramae 的博客,愿 Bug 远离,好运常伴! //////
博主的Gitee地址:阿拉美 (aramae) - Gitee.com

时代不会辜负长期主义者,愿每一个努力的人都能达到理想的彼岸。
一. AVL树前置知识
1. AVL树的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。
因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
-
它的左右子树都是AVL树
-
左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
(默认平衡因子=右子树高度-左子树高度)
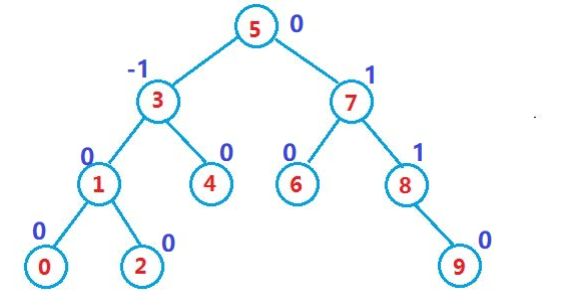
如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在$O(log_2 n)$,搜索时间复杂度O($log_2 n$)
即AVL树是一棵高度平衡的二叉搜索树,它具有二叉搜索树的所有性质,且增加了自己的特性(引入平衡因子),这在后面的实现上会有所体现。
AVL树节点的定义
template<class K, class V>
struct AVLTreeNode
{//三叉链: left right parentAVLTreeNode* _left; // 该节点的左孩子 AVLTreeNode* _right; // 该节点的右孩子 AVLTreeNode* _parent; // 该节点的双亲std::pair<K,V> _kv; // 键值对int _bf; // 该节点的平衡因子 balance factorAVLTreeNode(const std::pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}
};
• 三叉链结构(左、右、父指针)
• 平衡因子记录高度差
2. 二叉搜索树基础
插入逻辑
while (cur)
{if (cur->_kv.first < kv.first) // 向右查找else if (cur->_kv.first > kv.first) // 向左查找else return false; // 键已存在
}-
保持二叉搜索树性质:左子树 < 根节点 < 右子树
-
时间复杂度:O(h),h为树高
注: 和二叉搜索树相关的内容在前面一篇文章已经做了详细讲解,感兴趣的可以看一下
3. AVL树核心概念
平衡因子定义
平衡因子 = 右子树高度 - 左子树高度(反过来也行)
我们这里统一使用右树-左树
int _bf; // balance factor = 右子树高度 - 左子树高度合法值:-1, 0, 1
-
平衡条件:|bf| ≤ 1
-
bf ∈ {-2, -1, 0, 1, 2}
平衡因子更新规则
if (cur == parent->_left) parent->_bf--;
else parent->_bf++;-
左子树插入:bf--
-
右子树插入:bf++
4. 旋转操作(核心算法)
四种不平衡情况
情况1:左左失衡 - 右单旋
右旋(RR 情况)
场景:节点的左子树比右子树高2,且左子树的左子树更高
y x/ \ / \x T4 → z y/ \ / \ / \z T3 T1 T2 T3 T4/ \T1 T2-
发生在左子树的左子树插入
-
解决方案:右旋
void RotateR(Node* parent){Node* cur = parent->_left;Node* curright = cur->_right;parent->_left = curright;if (curright)curright->_parent = parent;Node* ppnode = parent->_parent;cur->_right = parent;if (ppnode == nullptr){_root = cur;cur->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;}情况2:右右失衡 - 左单旋
左旋(LL 情况)
场景:节点的右子树比左子树高2,且右子树的右子树更高
y x/ \ / \T1 x → y z/ \ / \ / \T2 z T1 T2 T3 T4/ \T3 T4-
发生在右子树的右子树插入
-
解决方案:左旋
void RotateL(Node* parent){++_rotateCount;Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;if (curleft){curleft->_parent = parent;}cur->_left = parent;Node* ppnode = parent->_parent;parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;}情况3:左右失衡 - 左右双旋
左右旋(LR 情况)
场景:节点的左子树比右子树高2,但左子树的右子树更高
z z y/ \ / \ / \x T4 左旋x → y T4 右旋z → x z/ \ / \ / \ / \
T1 y x T3 T1 T2 T3 T4/ \ / \T2 T3 T1 T2-
发生在左子树的右子树插入
-
解决方案:先左旋后右旋
void RotateLR(Node* parent){Node* cur = parent->_left;Node* curright = cur->_right;int bf = curright->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;cur->_bf = 0;curright->_bf = 0;}else if (bf == -1){parent->_bf = 1;cur->_bf = 0;curright->_bf = 0;}else if (bf == 1){parent->_bf = 0;cur->_bf = -1;curright->_bf = 0;}else{return false;}}情况4:右左失衡 - 右左双旋
右左旋(RL 情况)
场景:节点的右子树比左子树高2,但右子树的左子树更高
z z y/ \ / \ / \
T1 x 右旋x → T1 y 左旋z → z x/ \ / \ / \ / \y T4 T2 x T1 T2 T3 T4/ \ / \
T2 T3 T3 T4-
发生在右子树的左子树插入
-
解决方案:先右旋后左旋
void RotateRL(Node* parent){Node* cur = parent->_right;Node* curleft = cur->_left;int bf = curleft->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){cur->_bf = 0;curleft->_bf = 0;parent->_bf = 0;}else if (bf == 1){cur->_bf = 0;curleft->_bf = 0;parent->_bf = -1;}else if (bf == -1){cur->_bf = 1;curleft->_bf = 0;parent->_bf = 0;}else{assert(false);}}
5. 旋转操作实现细节
左旋步骤
-
保存相关节点指针
-
调整子树连接
-
更新父指针
-
处理根节点情况
-
重置平衡因子
双旋的特殊处理
-
双旋后需要根据子节点原始平衡因子调整
6. 平衡维护策略
向上回溯更新
终止条件
-
bf == 0:子树高度不变,停止向上更新
-
需要旋转:旋转后子树高度恢复,停止更新
-
到达根节点
二. AVL树的插入(详细分析+对应实现)
基本情况分析
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:
-
按照二叉搜索树的方式插入新节点
-
调整节点的平衡因子
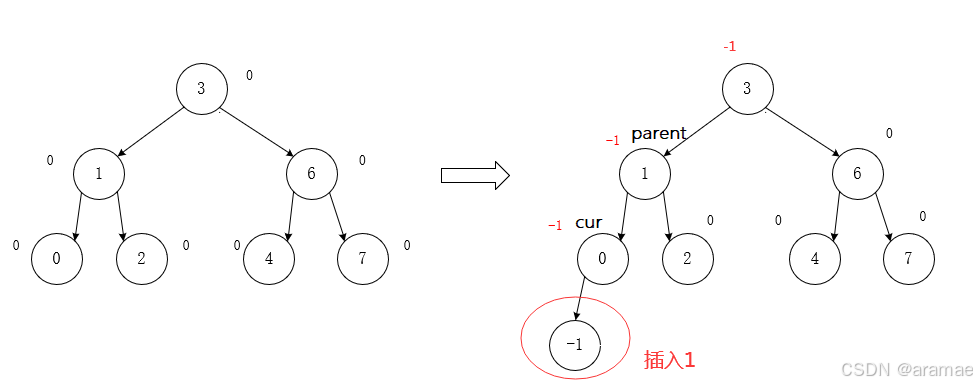
a. 更新父结点平衡因子
b. 根据父结点的平衡因子进行相应的操作
对于平衡因子
插入新结点后,首先可能会影响父结点的平衡因子,迭代往上,可能还会影响部分或全部(到根节点)祖先结点的平衡因子.
具体地说,即插入新结点后,需要根据父结点平衡因子的情况,决定是否继续往上对祖结点进行更新平衡因子,最多到达根结点.
平衡因子对应的操作
父结点平衡因子如何决定是否继续往上更新? 取决于更新后parent->_bf的值
- 1.若
parent->_bf == 1 || parent->_bf == -1,说明插入前的父结点一定是左右子树高度相等,即_bf为0.新增结点后父结点所在子树高度一定发生变化,爷爷结点所在子树也可能发生变化,因此需要进行迭代更新祖先平衡因子.
不可能是2或-2变成1或-1,因为这是AVL树的插入,至少先保证是AVL树才能插入
- 2. 若
parent->_bf == 2 || parent->_bf == -2,说明插入前的父结点所在子树一边高一边低,之后新结点恰好插入到了高的一边,导致不平衡,需要做旋转操作,调整平衡. 3.parent->_bf == 0,插入后父结点的平衡因子平衡,说明原先父结点的左右子树是一边高一边低,然后插入刚好插到了低的一边,使其平衡.插入结束
旋转操作
分析需要旋转的情况
首先,要针对AVL子树,找出/抽象出可能发生旋转的情况。
一棵可能发生旋转的树至少高度差为1,即两个结点以上。(前提)
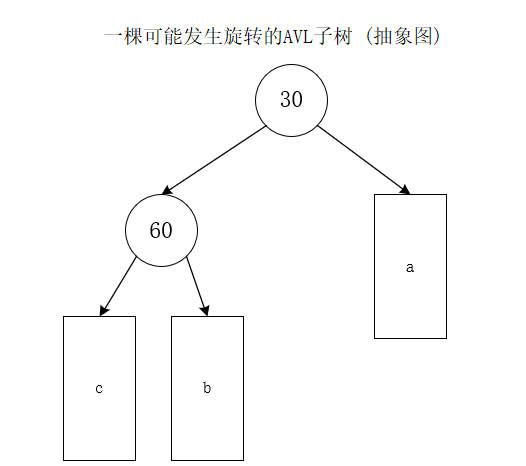
(可能会发生旋转的子树至少两个结点以上)
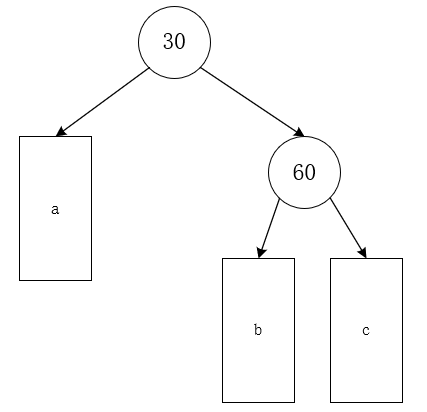
其中a,b,c是三棵AVL子树
-
当子树高度h==0时,即a、b、c都为空树
-
当子树高度h==1时,a、b、c都是叶子结点
-
当子树高度h==2时,a、b、c分别有三种情况
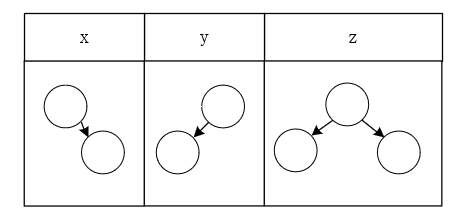
此时这个AVL子树有3*3*3=27种情况:a为x/y/z,b为x/y/z,c为x/y/z。
-
如此往下,还有更多的情况,但全部形状都可以用图中模型来代替。
以h==2为例,只有当b或c为z情况时,插入到b或c子树会影响到根结点(30),并使其发生旋转。
其他情况都无法使其发生旋转。因此,当前可以总结出2种需要旋转的情况:
- c为z时,插到c中(左左)
- b为z时,插到b中(左右)
左左:较高的子树是左孩子(60)所在子树,插到左孩子(60)的左子树上(c)引发根(30)旋转的情况叫“左左”。
顺口:插在较高左子树的左孩子上。
同理,水平镜像翻转的AVL子树也同理
- c为z时,插到c中(右右)
- b为z时,插到b中(右左)
结论
合并起来总共4种需要旋转的情况,验证其他高度也同样如此。
其中插入b子树使30结点发生旋转的情况:a为x/y/z,b为z,c为x/y/z,总共3*3=9种
其中插入c子树使30结点发生旋转的情况:a为x/y/z,b为x/y/z,c为z,总共3*3=9种
特例的数量非常多,无法穷举。
4种旋转操方法与特征
-
新节点插入较高左子树的左侧---左左:右单旋
-
特征
父:-2
子:-1
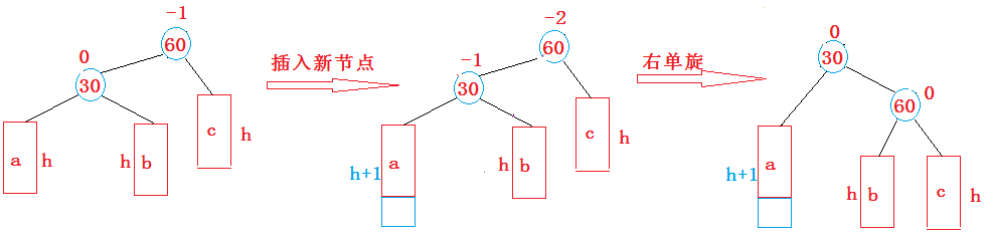
最左边高,旧根的左孩子变成新根,旧根成为新根的右孩子,同时领养新根的旧右孩子。
儿子上位 -- 儿子当根
右单旋(主角是儿子):老爹在我的右上方,让老爹以我为轴,旋转到我的右下方
-
-
新节点插入较高右子树的右侧---右右:左单旋
-
特征
父:2
子:1
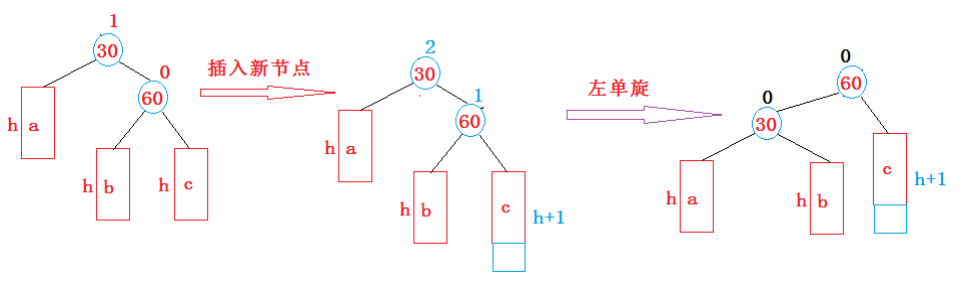
最右边高,旧根的右孩子变成新根,旧根成为新根的左孩子,同时领养新根的旧左孩子。
-
-
新节点插入较高左子树的右侧---左右:先左单旋再右单旋
-
特征
父:-2
子:1
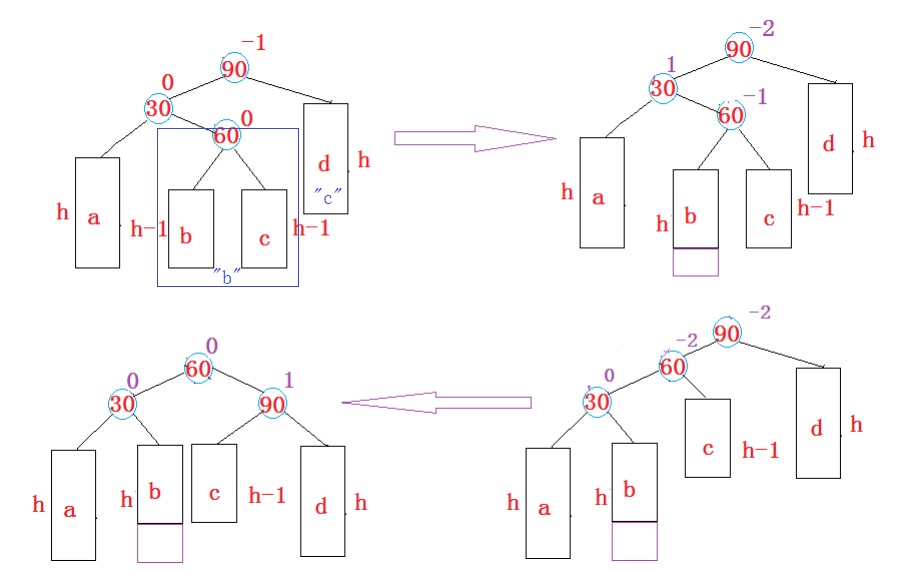
- 旧根的左儿子的右孩子(简称右孙子)高:让右孙子成为旧根的左孩子,旧左孩子变成孙子的左孩子,同时领养孙子的左孩子。 -- 对右孙子做左旋操作
- 右孙子成为旧根的新左儿子,再对新作儿子做右旋操作即可。
孙子上位 --- 孙子当根
感性描述:先左单旋再右单旋(孙子是主角):我在孙子左边,我的老爹在孙子右边,然后让孙子的爹(我)左旋下来,孙子成为我的爹,我的旧爹成为孙子的爹;最后再让孙子的新爹右旋下来。
描述2: 两次旋转分别用途: 1. 转化成标准单旋; 2.标准单旋
-
-
新节点插入较高右子树的左侧---右左:先右单旋再左单旋
-
特征
父:2
子:-1
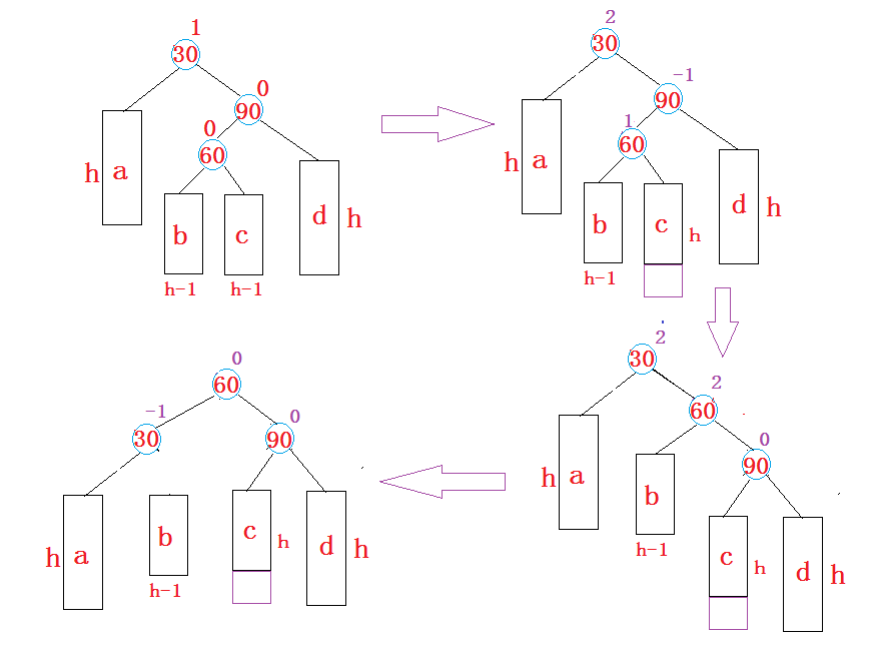
-
总共4种旋转的情况:
- 右旋(左左)
- 左旋(右右)
- 先左旋再右旋(左右)
- 先右旋再左旋(右左)
简要图:

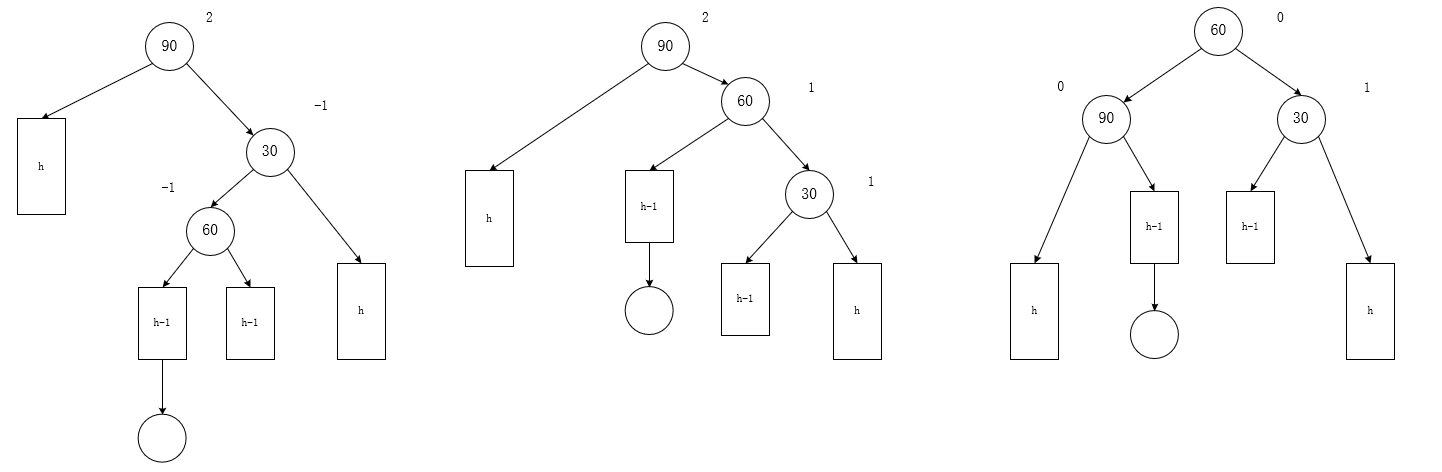
6种双旋平衡因子特征
容易发现单旋平衡因子都是0(高度差为0),而双旋平衡因子较为复杂,观察规律总结出一共6种情况。
-
左右左(h>0)
-
旧(特征)
孙:-1
-
新
父:1
子:0
孙:0
-
-
左右右(h>0)
-
旧(特征)
孙:1
-
新
父:0
子:-1
孙:0
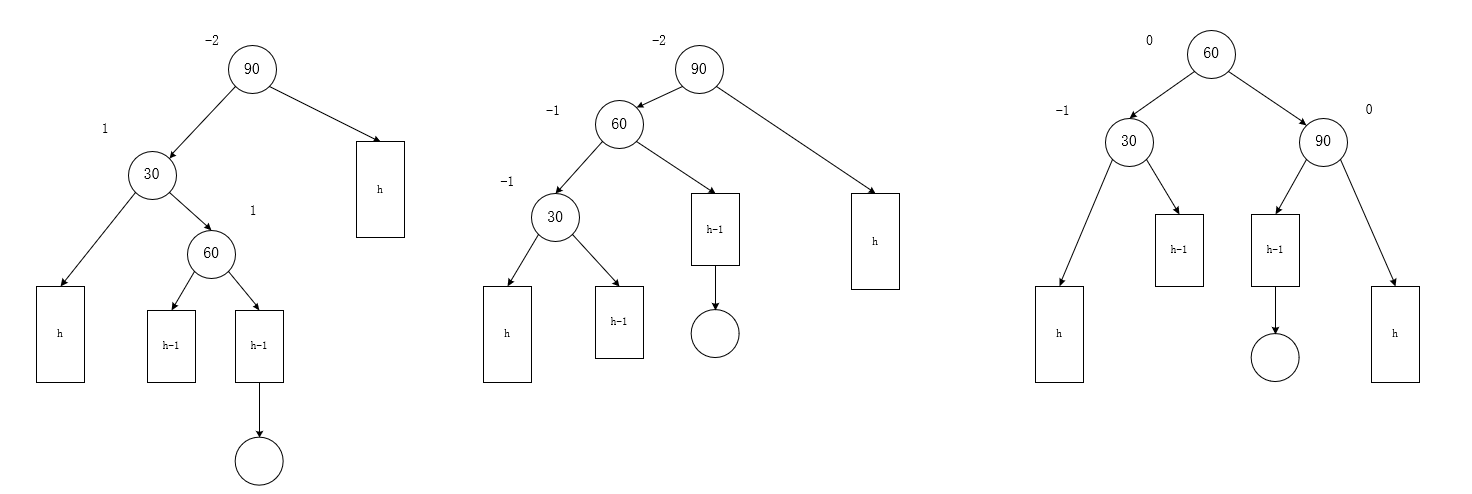
-
-
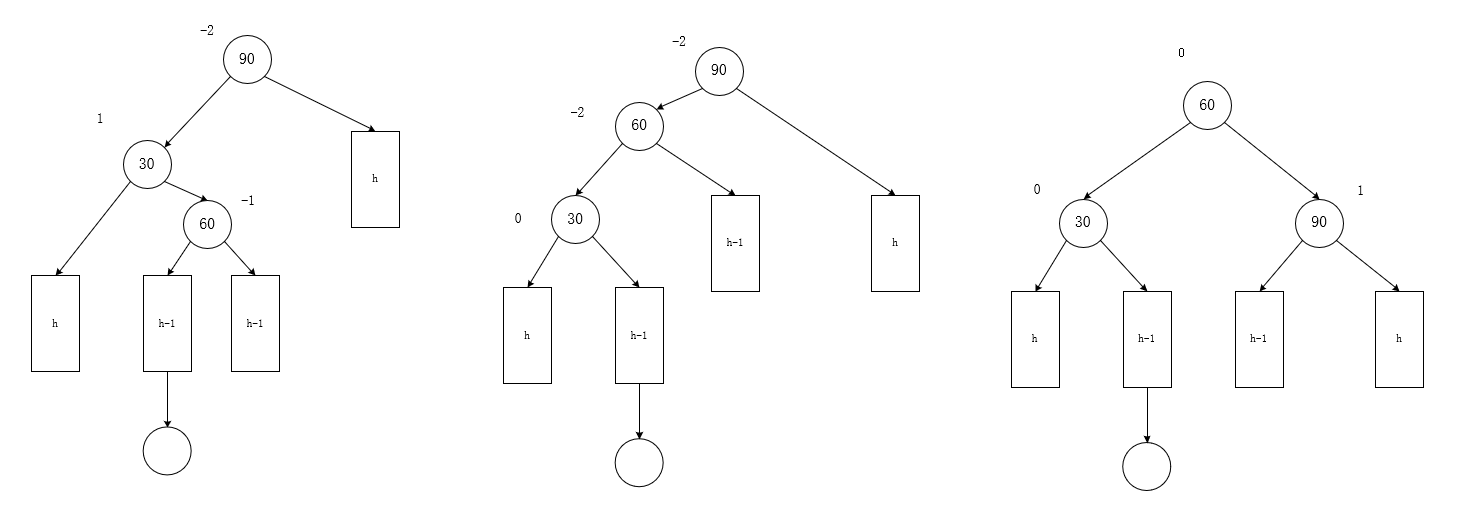
右左右(h>0)
-
旧(特征)
孙:1
-
新
父:-1
子:0
孙:0
-
-
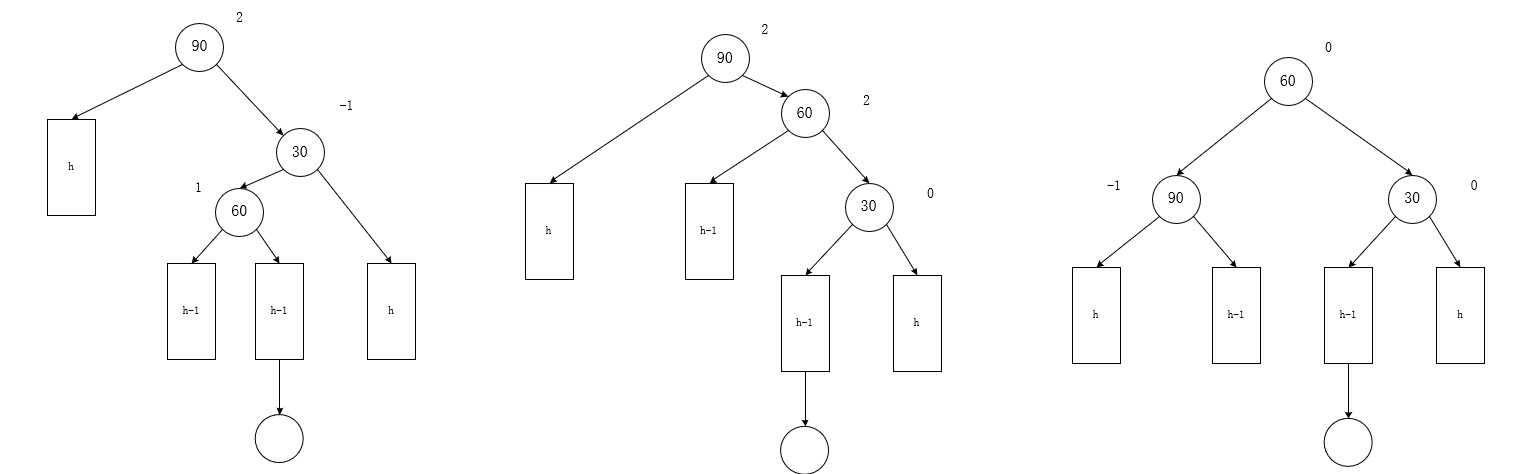
右左左(h>0)
-
旧(特征)
孙:-1
-
新
父:0
子:1
孙:0
-
-
左右,特例(h==0)
-
旧(特征)
孙:0
-
新
父:0
子:0
孙:0
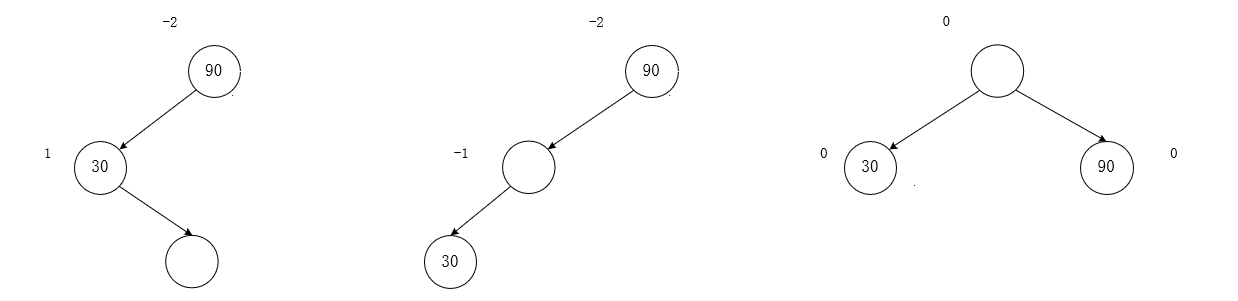
-
-
右左(h==0),与5相同
-
旧(特征)
孙:0
-
新
父:0
子:0
孙:0
-
代码实现(汇总)
四种旋转实现
//1. 右右void RotateL(Node* parent) {//. 记录爷爷(父亲的父亲)//. 我是父的右儿子(我是主角,儿子是新插入结点)//. 记录下我的左子树(托管)// 旋转(爷、父、子关系重新调整)// 成为爷爷的右儿子 (如果没有爷爷,则跳过;且说明父是根,更新我成为根)// 把我的左子树托管给父成为他的右孩子// 旧父成为我的左儿子,旧父的父更新成我//. 更新平衡因子//. 记录爷爷(父亲的父亲)//. 我是父的右儿子//. 记录下我的左子树Node* pparent = parent->_parent;Node* cur = parent->_right;Node* leftchild = cur->_left;//旋转//. 成为爷爷的右儿子 (如果没有爷爷,则跳过;且说明父是根,更新我成为根)if (pparent) { //有爷爷if(parent == pparent->_left)pparent->_left = cur;else {pparent->_right = cur;}cur->_parent = pparent; //三叉链维护}else { //没有爷爷,父亲是根cur->_parent = nullptr;_root = cur;}//. 父子地位交换parent->_right = leftchild;if (leftchild) { //三叉链维护leftchild->_parent = parent;}cur->_left = parent;parent->_parent = cur;//旋转 【end】//更新平衡因子cur->_bf = 0;parent->_bf = 0;}//2. 左左void RotateR(Node* parent) {//. 记录爷爷//. 我是父的左儿子//. 记录下我的右子树Node* pparent = parent->_parent;Node* cur = parent->_left;Node* rightChild = cur->_right;//旋转//. 成为爷爷的左儿子 (如果没有爷爷,则跳过;且说明父是根,更新我成为根)if (pparent) { //有爷爷if (parent == pparent->_left)pparent->_left = cur;else {pparent->_right = cur;}cur->_parent = pparent; //三叉链维护}else { //没有爷爷,父亲是根cur->_parent = nullptr;_root = cur;}//. 父子地位交换parent->_left = rightChild;if (rightChild) { //三叉链维护rightChild->_parent = parent;}cur->_right = parent;parent->_parent = cur;//旋转 【end】//更新平衡因子cur->_bf = 0;parent->_bf = 0;}
//3. 左右void RotateLR(Node* parent) {//我是儿子,但是主角是孙子(新插入结点)//记录下孙子//记录下孙子的平衡因子(特征)//对孙子进行左单旋,再右旋//更新平衡因子Node* cur = parent->_left;Node* grandson = cur->_right;int bf = grandson->_bf;RotateL(cur);RotateR(grandson->_parent);//三种情况if (bf == 0) {parent->_bf = 0;cur->_bf = 0;grandson->_bf = 0;}else if (bf == 1) {parent->_bf = 0;cur->_bf = -1;grandson->_bf = 0;}else if (bf == -1) {parent->_bf = 1;cur->_bf = 0;grandson->_bf = 0;}else {assert(false); //错误检查}}//4. 右左void RotateRL(Node* parent) {//我是儿子(父的右孩子),但是主角是孙子//记录下孙子(我的左孩子)//记录下孙子的平衡因子(特征)//对孙子进行右单旋,再左单旋//更新平衡因子Node* cur = parent->_right;Node* grandson = cur->_left;int bf = grandson->_bf;RotateR(cur); //将孙子的爹,就是我,进行右单旋RotateL(grandson->_parent); //将儿子的新爹进行左单旋//三种情况if (bf == 0) {parent->_bf = 0;cur->_bf = 0;grandson->_bf = 0;}else if (bf == 1) {parent->_bf = -1;cur->_bf = 0;grandson->_bf = 0;}else if (bf == -1) {parent->_bf = 0;cur->_bf = 1;grandson->_bf = 0;}else {assert(false);}}
插入操作实现
bool Insert(const std::pair<K,V> kv) {//第一个结点做根if (_root == nullptr) {_root = new Node(kv);_size++;return true;}//搜索Node* parent = _root;Node* cur = _root;while (cur) {//大于往右走if (kv.first > cur->_kv.first) {parent = cur;cur = cur->_right;}//小于往左走else if (kv.first < cur->_kv.first) {parent = cur;cur = cur->_left;}//找到了,存在相同的keyelse {return false;}} //循环搜索...//不存在,可以插入cur = new Node(kv); //new后,cur值发生改变,之后都不能使用地址进行比较if (cur->_kv.first < parent->_kv.first) { parent->_left = cur;}else {parent->_right = cur;}cur->_parent = parent; //三叉链链上父结点_size++;//调整平衡因子 : 最多到根,根的parent为nullptrwhile (parent) {//更新平衡因子if (cur->_kv.first < parent->_kv.first) {parent->_bf--;}else {parent->_bf++;}//看是否需要调整if (parent->_bf == 1 || parent->_bf == -1) {cur = parent;parent = parent->_parent;}else if(parent->_bf == 0){break; }else if(parent->_bf == 2 || parent->_bf == -2){if (parent->_bf == -2 && cur->_bf == -1) { //左左RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == 1) { //右右RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == 1) { //左右RotateLR(parent);}else if(parent->_bf == 2 && cur->_bf == -1){ //右左RotateRL(parent);}else { //错误检查assert(false);}break;}else {assert(false);}}return true;}
树高度与是否平衡树判断实现
size_t Hight() {return _Hight(_root);}bool IsBalance() {return _IsBalance(_root);}size_t _Hight(Node* root) {if (root == 0) return 0; //空size_t leftH = _Hight(root->_left);size_t rightH = _Hight(root->_right);return std::max(leftH, rightH) + 1; //+1:自己高度为1}bool _IsBalance(Node* root) {if (root == nullptr) return true;int leftH = _Hight(root->_left);int rightH = _Hight(root->_right);int bf = rightH-leftH;return bf == root->_bf //平衡因子&& (bf > -2 && bf < 2) //高度差&& _IsBalance(root->_left) && _IsBalance(root->_right);}
其他实现
#include<iostream>
#include<string>
#include<cassert>template<class K,class V>
struct AVLTreeNode {//三叉链AVLTreeNode<K,V>* _left;AVLTreeNode* _right;AVLTreeNode* _parent;int _bf; //balance factorstd::pair<K,V> _kv;AVLTreeNode(const std::pair<K,V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0),_kv(kv){}
};template<class K,class V>
class AVLTree {
public:using Node = AVLTreeNode<K, V>;AVLTree():_root(nullptr),_size(0){}public:void InOrder() {_InOrder(_root);std::cout<<std::endl;}private:void _InOrder(Node* root) {if (root == nullptr) {return ;}_InOrder(root->_left);std::cout<<root->_kv.first<<" ";_InOrder(root->_right);}private:Node* _root;size_t _size;
};
插入验证
- 两个数组包含各种旋转情况
- 每插入都判断是否平衡
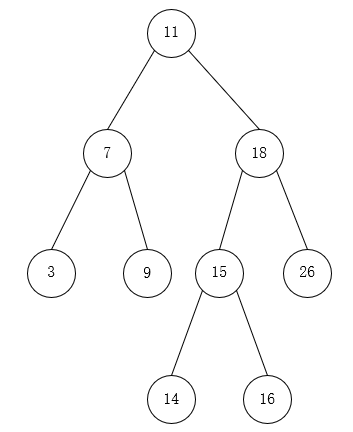
int main() {std::cout<<std::boolalpha;//int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16,14 };int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };AVLTree<int, int> t;for (int it : a) {t.Insert(std::make_pair(it, it));std::cout << "是否平衡: " << t.IsBalance() << std::endl;}t.InOrder(); //3 7 9 11 14 15 16 18 26
}
/** note* 简称:AVLT* AVL树,也叫高度平衡搜索二叉树* * * * 命名:两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明解决二叉搜索树退化成单支树的方法* -- 所以AVL树以两位俄罗斯数学家的名的开头命名A.V.L.* * 解决问题的方法:* 当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1* (需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。* * AVL树的定义* 一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:* $ 它的左右子树都是AVL树* $ 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)* balance factor(平衡因子/平衡系数) -- AVL树不一定有平衡因子(有些算法没有)* * ? 为什么高度差不能绝对为0? 因为有些情况高度差绝对不可能为0 -- 如偶数个结点时* * 搜索时间复杂度:log2n* * AVL树的性能:* AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这* 样可以保证查询时高效的时间复杂度,即log_2 (N)。但是如果要对AVL树做一些结构修改的操* 作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,* 有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数* 据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。* -- 纯搜索很强* *///AVL树的旋转
/*** 1.右单旋(左左,-2-1):新结点插入在较高左子树的左树 -- (设为该左子树的根为"根",不一定是整棵树的根)* $ 插入前,AVL树是平衡的* 插入后,以根的父节点为根的这棵子树不平衡 -- 设为"父根"* 旋转:将父根取出,根代替父根的位置,而父根取代根的右子树.如果根有右子树,则根的右子树成为父根的左子树* * 解释:>* $ 根位于父根的左子树,将父根和他的右子树一起取出.左子树(根)与父根断链,且链接上父根的父亲的左子树(如果不是整个树的根的话),替代父根称为新的父根 -- 称为上提* $ 由于父根的值是大于根的(搜索树左小右大),所以父根取代的是根的右子树,* $ 若之前根有右子树,因为根的原右子树比根大,而父根又比他的左子树大,即比根的原右子树还大,所以根的原右子树插在父根的左树(父根的左树必为空,因为刚与根断链)* * $ 如果父根是整棵树的根,则调整完后需要更新根节点* 助记:原有位置有子树的,被取代的,按从根开始插入,得到的位置就是新位置* * ? 为什么叫右单旋? 可以理解成右下旋 -- 右边高右边旋* * 2.左单旋(右右+2+1): 和右单旋一样* * $ 单旋:你的右变我的左,我的左变你的右(先断子树后父树)* * * * 3.新结点插入较高左子树的右侧(左右) :* $ 先左单旋再右单旋(先左子树的子(两个绝对值为1的)树旋,后两个父(两个绝对值为2的)旋)* * 4.新结点插入较高右子树的左侧 -- (右左)* $: 先右单旋再左单旋* * * * 注::::::::::::::::::::::::::::::::::::::::::::* $ 在下述例子中,图像只为具象出来写代码,举例用.实际上旋转的多种情况主要是看平衡因子* $ 选出四种旋转方式的例子的图并不代表所有的情况都如图,但这四种方式对应的平衡因子是所有情况* $ 所以算法没有问题,图要多揣摩一下* * * 实际就四种:* 1. / 2. \ 3. / 4. \* / \ \ /* 右旋 左旋 先左旋后右旋 先右旋后左旋* * * *///模拟实现AVL -- map底层
/*** * * insert插入* 1.三叉链链接到位(链接上插入的结点,新结点也要链接上父亲)* 2.更新平衡因子* $ 如果更新后所有的平衡因子都为-1,0,1其中一个,则不需要调整平衡树* $ 如果更新后有平衡因子的绝对值>1,则需要调整平衡树* 3.调整平衡树* * note:* $ 新增的结点,只会影响到他祖先的这一路径的结点* $ 往上更新爷爷结点取决于parent的高度是否发生变化.变了则往上更新(前提是平衡状态),不变则不再更新.* parent._bf如果更新后为0,说明结点插在矮树这边,使左右子树平衡,即高度不变* parent._bf如果更行后为-1或1,说明左子树高或右子树高了,高度变了* $ 如果parent-_bf为2,则需要先处理,不能再继续更新(不再平衡)* */
#include<assert.h>
#include<iostream>
using std::cout;
using std::endl;
using std::cin;
using std::pair;namespace test
{template<class K, class V>struct AVLTreeNode{//三叉链: left right parentAVLTreeNode* _left;AVLTreeNode* _right;AVLTreeNode* _parent;std::pair<K, V> _kv; //键值对int _bf; //balance factor -- 平衡因子 :默认规定为右子树高度减去左子树高度AVLTreeNode(const std::pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}};template<class K, class V>class AVLTree{public:typedef AVLTreeNode<K, V> node;private:node* _root = nullptr;public:bool insert(const std::pair<K, V>& kv){if (!_root){_root = new node(kv);return true;}node* cur = _root;node* parent = nullptr;while (cur){if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new node(kv);if (kv.first>parent->_kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//cur->_bf = 0;//cout << "插入后父亲的平衡因子:>"<<parent->_bf << " ";while (parent){if (cur == parent->_left){--(parent->_bf);//cout << "更新后父亲的平衡因子:>"<<parent->_bf << " ";}else {++(parent->_bf);//cout << "更新后父亲的平衡因子:>" << parent->_bf << " ";}if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1){parent = parent->_parent;cur = cur->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//if (parent->_bf == 2 && cur->_bf == 1){//cout << "RotateL" << " ";RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){//cout << "RotateR" << " ";RotateR(parent);}else if (parent->_bf == -2 && cur->_bf == 1){//cout << "RotateLR" << " ";RotateLR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){//cout << "RotateRL" << " ";RotateRL(parent);}else{cout << " 错误的结点的父 " << parent->_kv.first << " 错误的结点的子 " << cur->_kv.first << " ";assert(false);}break;}else{assert(false);}}//cout << endl;return true;}public:void InOrderTraversal(){_InOrderTraversal(_root);}bool isBalanceTree(){return _isBalanceTree(_root);}int Height(){return _Height(_root);}private:bool _isBalanceTree(node* root){if (!root){return true;}//左右子树高度差的模或bf的模是否小于2int leftH = _Height(root->_left);int rightH = _Height(root->_right);int diff = rightH - leftH;int Hdiff_abs = abs(rightH - leftH);//if (abs(root->_bf) >2 || Hdiff_abs > 2)//{// cout << "左右子树高度差的模或bf的模大于2,key为:>" << root->_kv.first << endl;// return false;//}////左右子树的高度差的模是否为bf//if (diff != root->_bf)//{// cout << "左右子树的高度差的模不等于平衡因子,key为:>"<<root->_kv.first <<" 平衡因子为: "<< root->_bf << endl;// //return false;//}return abs(root->_bf) < 2&& Hdiff_abs < 2&& diff == root->_bf&& _isBalanceTree(root->_left)&& _isBalanceTree(root->_right);}int _Height(node* root){if (!root){return 0;}int leftH = _Height(root->_left);int rightH = _Height(root->_right);return leftH > rightH ? leftH + 1 : rightH + 1;}void _InOrderTraversal(node* root){if (root == nullptr){return;}_InOrderTraversal(root->_left);cout << "key:> " << root->_kv.first << " " << "bf:> " << root->_bf << endl;_InOrderTraversal(root->_right);}/**左单旋* 设x 为 x y为 y z为 z* 1 1 1 1* * * a,b,c一定是是x,y,z三种情况之一 * * 当c为x情况下,在经过祖先c插入的一定是符合左单旋 -- 右右(右右分别为1,c)* * p(parent)* a sR(subR)* b(subRL) c* * 左单旋操作* 1.旋转* $.将b链接到p的左边 然后更新b的_parent , _parent=p(前提是b不为空)* $.将p链接到sR,然后更新p的_parent , _parent=sR* 2.更新根* $.如果是根(pparent==nullptr),则更新_root , _root=subR * $.如果不是根,判断是祖先结点的左还是右,然后再链接上,最后记得更新_parent* 3.更新parent和subR的平衡因子_bf, 旋转后平衡因子都为0 * */void RotateL(node* parent)//左单旋 -- parent是bf为2的结点{node* subR = parent->_right;//sRnode* subRL = subR->_left; //b//1.将b链接到p的右边 然后更新b的parent=p(前提是b不为空)parent->_right = subRL;if (subRL){subRL->_parent = parent;}node* pparent = parent->_parent;//2.将p链接到sR,然后更新p的parent=sRsubR->_left = parent;parent->_parent = subR;//3.更新根if (!pparent){_root = subR;_root->_parent = nullptr;}else{if (pparent->_left == parent){pparent->_left = subR;}else{pparent->_right = subR;}subR->_parent = pparent;}parent->_bf = subR->_bf = 0;}/*** * p(parent)* sL(subL) c * a b(subLR) * */void RotateR(node* parent)//右单旋 -- parent是bf为-2的结点{node* subL = parent->_left;//sR node* subLR = subL->_right; //b//1.将b链接到p的左边 然后更新b的parent=p(前提是b不为空)parent->_left = subLR;if (subLR){subLR->_parent = parent;}node* pparent = parent->_parent;//2.将p链接到sL,然后更新p的parent=sLsubL->_right = parent;parent->_parent = subL;//3.更新根if (parent == _root){_root = subL;_root->_parent = nullptr;}else{if (pparent->_left == parent){pparent->_left = subL;}else{pparent->_right = subL;}subL->_parent = pparent;}parent->_bf = subL->_bf = 0;}/*** * p* sL |d--高度h* |a|--高度h sLR d * a b c--高度h-1 d* a b c * * * * * * $ 在sLR处插入都会引发旋转,因为d矮了* * 旋转:先左旋,后右旋* * 1.先左旋sL结点,后右旋p结点* 2.更新根* 3.更新平衡因子* $.插在右边,sL为-1* $.插在左边,p为-1* $,如果插入后sLR为0(刚好sLR是新插入的),即h=0,整棵树就3结点,平衡后都是0** * * */void RotateLR(node*parent) //左右{node* subL = parent->_left;node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 1){parent->_bf = 0;//虽然左旋和右旋已经置零,但是以防万一,安全一点,再次置零subLR->_bf = 0;//虽然左旋和右旋已经置零,但是以防万一,安全一点,再次置零subL->_bf = -1;//必须手动置零}else if (bf == -1){parent->_bf = 1;//必须手动置零subLR->_bf = 0;//虽然左旋和右旋已经置零,但是以防万一,安全一点,再次置零subL->_bf = 0;//虽然左旋和右旋已经置零,但是以防万一,安全一点,再次置零}else if (bf == 0){parent->_bf = 0;subLR->_bf = 0;subL->_bf = 0;}else//以防万一,安全一点{assert(false);}}/*** * p* |a--高度h sR * a sRL |d|--高度h * a b c--高度h-1 d * b c d * */void RotateRL(node* parent) //右左{node* subR = parent->_right;node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1) //插在右边,右边平衡,左边不平衡{subR->_bf = 0;parent->_bf = -1;subRL->_bf = 0;}else if (bf == -1) //插在左边,左边平衡,右边不平衡{subR->_bf = 1;parent->_bf = 0;subRL->_bf = 0;}else if (bf == 0){subR->_bf = 0;parent->_bf = 0;subRL->_bf = 0;}else//以防万一,安全一点{assert(false);}}};void test_AVL1(){int arr[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 }; //结点7:左右 结点9:右 结点26:左 结点18:右左 结点15:左右//int arr[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 }; //只有一个右左,结点6test::AVLTree<int, int> t;for (auto i : arr){cout << "i:>" << i << "\t";t.insert(std::make_pair(i,i));cout << endl;}t.InOrderTraversal();cout << "是否为AVL树? " << t.isBalanceTree() << endl;}#include<time.h>void test_AVL2(){srand((size_t)time(0));const size_t N = 5000000;test::AVLTree<int, int> t;for (size_t i = 0; i < N; ++i){size_t x = rand() + i;//size_t x = rand() * i - rand();//cout << "x:>" << x << "\t";t.insert(std::make_pair(x, x));}//cout << t.isBalanceTree()<<endl;cout << "AVLT高度:>" << t.Height() << endl;}
}结语:感谢相遇
/// 高山仰止,景行行止。虽不能至,心向往之 ///