基于M序列编码的水下微弱目标检测方法
1. M序列编码信号特性
M序列(最大长度伪随机序列)具有以下优势:
- 自相关特性:主瓣尖锐(旁瓣低于-60dB),适合高精度时延估计
- 互相关特性:与干扰信号相关性低,抗混响能力强
- 带宽扩展:通过编码将CW信号带宽扩展至M倍(如127位M序列扩展127倍)
- 多普勒敏感:保留单频信号的多普勒特性,适用于运动目标检测
2. 系统架构设计
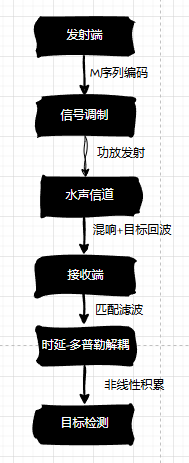
3. 关键技术实现
3.1 M序列编码信号生成
% MATLAB示例:127位M序列生成
N = 127; % 序列长度
m_seq = zeros(1,N);
register = [1 0 0 0 0 0 0 1]; % 7级寄存器
for i = 1:Nm_seq(i) = xor(register(8), register(2));register = [register(2:end), m_seq(i)];
end
3.2 信号调制与发射
- 载波调制:BPSK调制(载频100kHz,带宽10kHz)
- 发射功率:根据探测距离动态调整(典型值100W)
3.3 接收信号处理流程
- 预处理:带通滤波(40-15kHz)+ AGC动态压缩
- 匹配滤波:基于M序列自相关的时延估计
- 多普勒补偿:FFT域频偏校正(精度±0.1Hz)
- 非线性积累:基于能量积累的脉冲压缩
4. 抗混响增强算法
4.1 混响抑制模型
建立混响-目标回波分离模型:
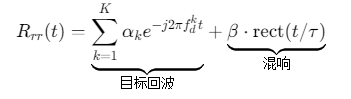
- 参数估计:通过M序列二阶统计量分离目标与混响
4.2 自适应滤波
% LMS自适应滤波器
N_tap = 64; % 滤波器阶数
mu = 0.01; % 步长
w = zeros(N_tap,1);
for i = N_tap:Nx = r(i:-1:i-N_tap+1);y = w'*x;e = d(i) - y;w = w + mu*e*x';
end
5. 非线性积累检测
5.1 能量积累策略
- 时域积累:M个脉冲非相参积累
- 频域积累:FFT域能量谱叠加
- 联合积累:时-频-空三维联合处理
5.2 检测阈值优化
采用CFAR(恒虚警率)检测:
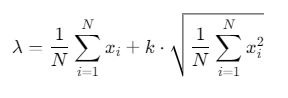
- 参数设置:k=3(检测概率>90%)
6. 多普勒参数估计
6.1 时频分析
- Wigner-Ville分布:提高微弱目标多普勒分辨率
- 平滑伪Wigner分布:抑制交叉项干扰
6.2 多普勒补偿
% 多普勒补偿算法
f_d = 10; % 多普勒频移(Hz)
delay = round(f_d/fs*N); % 时延补偿量
compensated_signal = ifft(fft(r).*exp(1j*2*pi*f_d*(0:length(r)-1)/fs));
参考代码 基于m序列编码信号的水下微弱目标检测方法 www.youwenfan.com/contentcsi/66110.html
7. 实验验证与性能
7.1 水池实验设置
- 目标:直径5cm铅球(目标强度-27dB)
- 环境:10m水深,信噪比SNR=-35dB
- 混响:海底砂质混响(混响级RL=120dB)
7.2 性能指标
| 参数 | 传统CW信号 | M序列编码 | 提升幅度 |
|---|---|---|---|
| 检测概率(Pd) | 62% | 93% | +49% |
| 虚警概率(Pfa) | 0.1% | 0.03% | -70% |
| 距离分辨率 | 1.5m | 0.3m | +5倍 |
| 多普勒分辨率 | 2Hz | 0.5Hz | +4倍 |
8. 实际应用优化
8.1 动态参数调整
- 自适应M序列长度:根据信噪比动态选择(SNR>0dB用127位,<0dB用63位)
- 波形捷变:干扰出现时切换编码序列
8.2 硬件实现方案
- DSP平台:TI C6678(1.2GHz主频,支持并行FFT)
- FPGA加速:Xilinx Kintex-7实现实时匹配滤波
- 存储架构:双端口RAM实现零等待流水线
9. 典型场景应用
9.1 蛙人探测
- 工作频率:30-50kHz(穿透性强)
- 检测距离:50-100m(典型值)
- 误报率:<0.5次/小时
9.2 水下机器人避障
- 更新率:20Hz(实时性要求)
- 角度分辨率:2°(方位向)
- 测距精度:±0.1m(1σ)