基于 GEE 的 Sentinel-2 光谱、指数、纹理特征提取与 Sentinel-1 SAR 数据处理
目录
一、代码整体框架与核心功能
二、代码逐段解析
(一)注释与基础配置
(二)Sentinel-2 数据处理模块
1. 数据筛选与预处理
2. 指数计算(植被指数 + 土壤指数)
(1)植被指数(4 类)
(2)土壤指数(6 类)
3. 纹理特征提取(基于近红外 B8 波段)
4. 光谱波段筛选与格式统一
(三)Sentinel-1 数据处理模块
1. 数据筛选与升轨 / 降轨分离
2. 雷达数据合成与融合
(四)数据可视化模块
1. Sentinel-2 相关可视化
2. Sentinel-1 相关可视化
3. 纹理特征可视化
4. 地图中心设置
(五)数据导出模块
(六)信息打印模块
三、运行结果
四、代码关键技术要点与优化建议
(一)关键技术要点
(二)优化建议
五、代码应用场景

若觉得代码对您的研究 / 项目有帮助,欢迎点击打赏支持!需要完整代码的朋友,打赏后可在后台私信(复制文章标题发给我),我会尽快发您完整可运行代码,感谢支持!
一、代码整体框架与核心功能
本代码基于 Google Earth Engine(GEE)平台,实现了 Sentinel-2 光学影像与 Sentinel-1 雷达影像的协同处理,涵盖数据获取、指数计算、纹理特征提取及多源数据融合导出,最终生成包含多维度特征的 10 米分辨率 GeoTIFF 数据,可广泛应用于农业监测、生态评估、土地利用分类等遥感应用场景。
代码遵循 “数据输入→数据处理→特征计算→数据融合→可视化→导出” 的遥感数据处理流程,核心功能分为三大模块,各模块的职责与输出如下表所示:
| 核心模块 | 关键任务 | 输出结果 |
|---|---|---|
| Sentinel-2 处理 | 1. 筛选低云量地表反射率数据2. 计算 4 类植被指数、6 类土壤指数3. 提取近红外波段 17 个纹理特征4. 筛选 9 个关键光谱波段 | 包含 “光谱波段 + 植被指数 + 土壤指数 + 纹理特征” 的光学特征集 |
| Sentinel-1 处理 | 1. 筛选 IW 模式 SAR 数据2. 分离升轨 / 降轨数据3. 提取 VV/VH 双极化波段4. 多时相中值合成去噪 | 升轨(ASC_VV/ASC_VH)、降轨(DESC_VV/DESC_VH)雷达特征集 |
| 数据融合与导出 | 1. 合并光学与雷达特征2. 统一数据格式与空间范围3. 可视化关键特征4. 导出 Cloud Optimized GeoTIFF | 10 米分辨率、覆盖研究区的多源融合数据集(GeoTIFF) |
二、代码逐段解析
(一)注释与基础配置
代码开头的注释块是项目文档的核心,明确了代码的用途、功能边界与数据参数,便于后续维护与复用:
/** 代码名称:GEE获取Sentinel-1/2影像数据及特征计算* 描述:使用Google Earth Engine获取和处理Sentinel-1/2卫星影像数据* 功能:* 1. Sentinel-2数据处理:* - 获取指定区域的Sentinel-2 SR数据(地表反射率数据)* - 计算植被指数:NDVI、GNDVI、EVI、SAVI* - 计算土壤指数:BSI、NDSI、CI、SBI、NDTI、NDRI* - 计算纹理特征(基于近红外B8波段):ASM、Contrast等17个特征* * 2. Sentinel-1数据处理:* - 获取升轨和降轨SAR数据* - 提取VV和VH极化波段* - 生成多时相合成影像* * 3. 数据导出:* - 导出10m分辨率的多源遥感数据为GeoTIFF格式* - 包含光学波段、雷达波段、植被指数、土壤指数和纹理特征* * 数据时间:2020-01-01至2020-12-31* 空间分辨率:10米* */// 定义感兴趣区域
var region = table;- 关键说明:
var region = table是代码的 “空间入口”,table需提前在 GEE 平台导入(如 Shapefile、KML 等矢量边界),后续所有数据处理均基于该区域裁剪,确保空间一致性。
(二)Sentinel-2 数据处理模块
Sentinel-2 是欧空局的光学卫星,搭载多光谱成像仪,提供 13 个波段,此处重点使用地表反射率数据(SR)(去大气校正后的标准化数据,可直接用于指数计算)。
1. 数据筛选与预处理
// 1. 加载Sentinel-2地表反射率数据集(HARMONIZED版本确保不同传感器数据一致性)
var s2Collection = ee.ImageCollection('COPERNICUS/S2_SR_HARMONIZED').filterDate('2020-01-01', '2020-12-31') // 时间范围:2020全年.filterBounds(region) // 空间筛选:仅保留覆盖研究区的影像.filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE', 5)) // 质量筛选:云量<5%(减少云干扰).map(function(image) {return image.clip(region); // 逐影像裁剪:提前裁剪减少后续计算量});// 2. 多时相中值合成(核心去噪步骤)
var s2Median = s2Collection.mean().clip(region); - 技术细节:
mean()(均值合成):相较于中值(median()),均值更适合连续反射率数据,能平滑季节波动,同时保留地物整体特征(如作物生长季的平均植被覆盖度);COPERNICUS/S2_SR_HARMONIZED:是 Sentinel-2 的 “harmonized” 版本,解决了 Sentinel-2A/B 卫星传感器差异导致的波段偏移问题,确保跨时间序列数据的可比性。
2. 指数计算(植被指数 + 土壤指数)
通过normalizedDifference()(归一化差值)和expression()(自定义公式)计算 10 类指数,覆盖植被生长状态与土壤属性监测需求,各指数的计算逻辑与应用场景如下:
(1)植被指数(4 类)
用于表征植被覆盖度、生物量、光合能力等,核心是利用 “植被对近红外(NIR)强反射、对红光(RED)强吸收” 的光谱特性:
var indices = {// 1. NDVI(归一化植被指数):最常用植被指数,范围[-1,1],正值越大植被越茂盛NDVI: s2Median.normalizedDifference(['B8', 'B4']).clip(region), // 2. GNDVI(绿度归一化植被指数):用绿光(B3)替代红光,对早期植被(如幼苗)更敏感GNDVI: s2Median.normalizedDifference(['B8', 'B3']).clip(region), // 3. EVI(增强植被指数):引入蓝光(B2)修正大气散射,减少高植被覆盖区的饱和问题(如森林)EVI: s2Median.expression('2.5 * ((NIR - RED) / (NIR + 6 * RED - 7.5 * BLUE + 1))', {'NIR': s2Median.select('B8'), // 近红外波段(842nm)'RED': s2Median.select('B4'), // 红光波段(665nm)'BLUE': s2Median.select('B2') // 蓝光波段(490nm)}).clip(region),// 4. SAVI(土壤调整植被指数):引入土壤调节系数0.5,减少土壤背景(如裸地、稀疏植被区)对指数的干扰SAVI: s2Median.expression('((NIR - RED) * (1 + 0.5))/(NIR + RED + 0.5)', {'NIR': s2Median.select('B8'),'RED': s2Median.select('B4')}).clip(region),// ...后续土壤指数
};(2)土壤指数(6 类)
利用 “土壤对短波红外(SWIR)强反射、对可见光 / 近红外弱反射” 的特性,表征土壤湿度、有机质含量、盐碱化程度等:
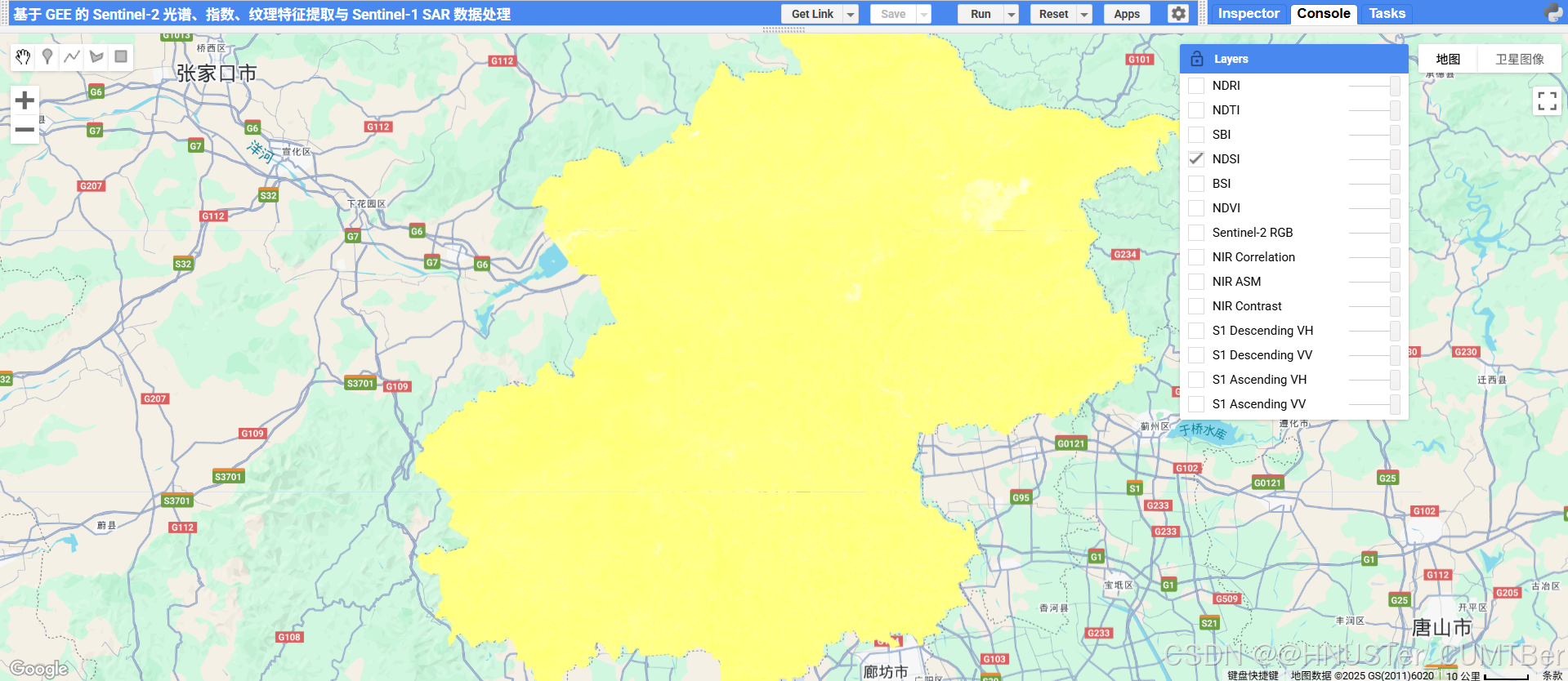
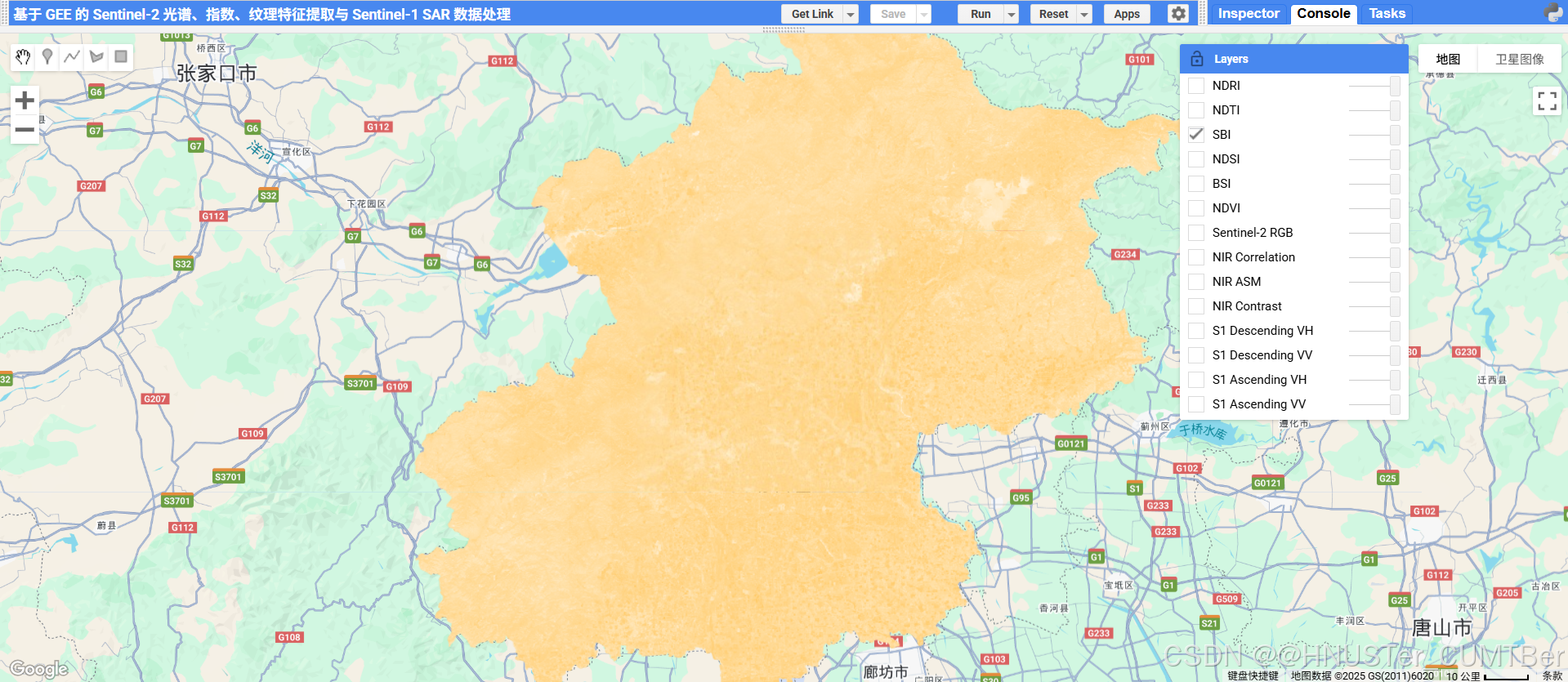
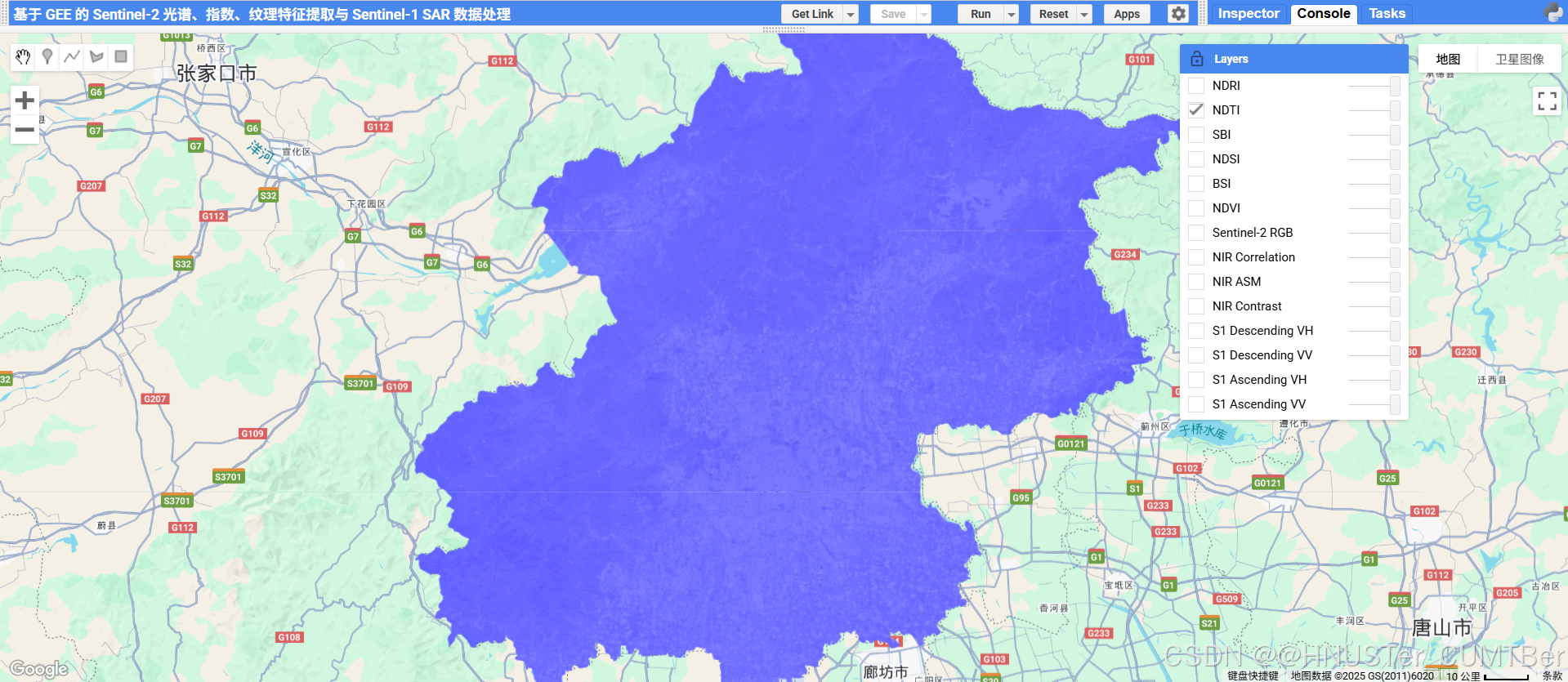
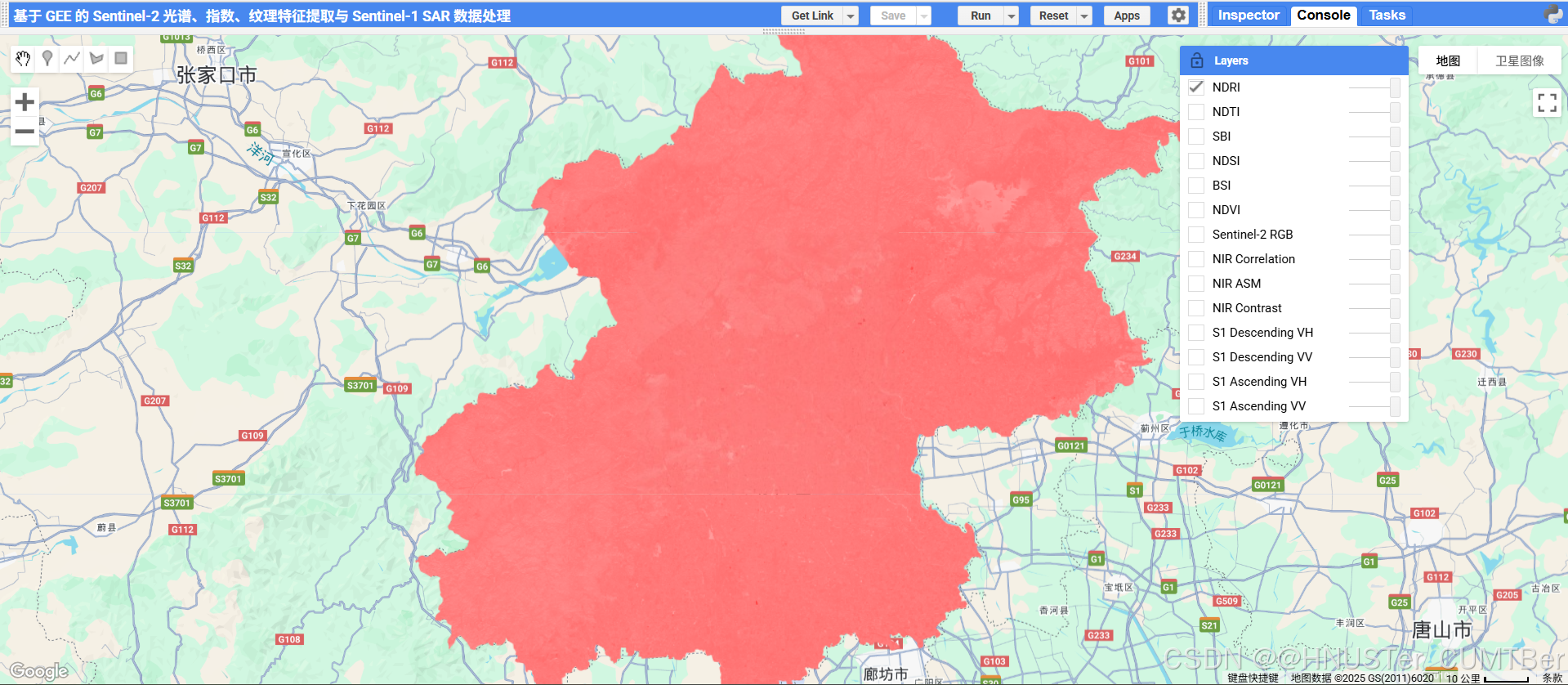
var indices = {// ...前文植被指数// 1. BSI(裸土指数):正值越大裸土比例越高,用于区分裸地与植被BSI: s2Median.expression('((SWIR1 + RED) - (NIR + BLUE)) / ((SWIR1 + RED) + (NIR + BLUE))', {'SWIR1': s2Median.select('B11'), // 短波红外1(1610nm)'RED': s2Median.select('B4'),'NIR': s2Median.select('B8'),'BLUE': s2Median.select('B2')}).clip(region),// 2. NDSI(归一化差值土壤指数):反映土壤湿度,值越高土壤越湿润NDSI: s2Median.normalizedDifference(['B11', 'B8']).clip(region), // 3. CI(粘土指数):SWIR1/SWIR2比值,值越高粘土含量越高(粘土对SWIR2吸收更强)CI: s2Median.expression('(SWIR1 / SWIR2)', {'SWIR1': s2Median.select('B11'),'SWIR2': s2Median.select('B12') // 短波红外2(2190nm)}).clip(region),// 4. SBI(土壤亮度指数):值越高土壤亮度越高(如盐碱土亮度高于普通土壤)SBI: s2Median.normalizedDifference(['B12', 'B8']).clip(region), // 5. NDTI(归一化差值土壤湿度指数):专门监测土壤表层湿度,值越高湿度越大NDTI: s2Median.normalizedDifference(['B11', 'B12']).clip(region), // 6. NDRI(归一化差值红边指数):用红光(B4)和绿光(B3),对土壤有机质敏感NDRI: s2Median.normalizedDifference(['B4', 'B3']).clip(region)
};- 共性操作:所有指数均通过
clip(region)确保空间范围与研究区一致,避免无效数据干扰。
3. 纹理特征提取(基于近红外 B8 波段)
纹理特征反映影像中像素灰度值的空间分布规律(如均匀性、对比度),可补充光谱特征的不足(如区分 “茂密森林” 与 “稀疏森林”,二者光谱相似但纹理差异大)。代码中基于灰度共生矩阵(GLCM) 提取 17 个纹理特征:
// 1. 预处理:近红外波段(B8)转换为8位无符号整数(GLCM要求输入为整数型)
var nir_int = s2Median.select('B8').multiply(255).toUint8() // 反射率(0-1)×255映射到0-255灰度值.clip(region);// 2. 计算GLCM纹理矩阵
var glcm = nir_int.glcmTexture({size: 3, // 窗口大小:3×3像素(常用窗口,平衡细节与计算效率)kernel: ee.Kernel.square({radius: 1, // 核半径1像素(对应3×3窗口)units: 'pixels',normalize: true // 归一化:消除窗口内像素数量对纹理值的影响})
}).clip(region);// 3. 纹理特征重命名(便于后续识别与使用)
var texture = {'NIR_asm': glcm.select('B8_asm'), // 角二阶矩:反映纹理均匀性,值越高越均匀'NIR_contrast': glcm.select('B8_contrast'), // 对比度:反映像素灰度差异,值越高边界越清晰'NIR_corr': glcm.select('B8_corr'), // 相关性:反映像素间灰度相关性,值越高纹理越有规律'NIR_var': glcm.select('B8_var'), // 方差:反映灰度值离散程度,值越高纹理越粗糙// ...其余13个特征(idm、savg、ent等,均为GLCM标准输出)
};- 关键原理:GLCM 通过统计 3×3 窗口内 “相邻像素灰度值对” 的出现频率,计算出 17 个量化指标,每个指标从不同维度描述纹理(如
ent(熵)反映纹理复杂度,值越高纹理越复杂)。
4. 光谱波段筛选与格式统一
筛选 Sentinel-2 中10 米 / 20 米分辨率的关键波段(20 米波段会自动重采样至 10 米,与其他数据匹配),并转换为Float32格式(确保数值精度,避免后续计算溢出):
var spectralBands = s2Median.select(['B2', 'B3', 'B4', 'B5', 'B6', 'B7', 'B8', 'B8A', 'B11']).toFloat().clip(region);
// 波段说明:
// B2(蓝)、B3(绿)、B4(红)、B8(近红外):10米分辨率,核心光学波段
// B5(红边1)、B6(红边2)、B7(红边3)、B8A(近红外2):20米分辨率,对植被生长阶段敏感
// B11(短波红外1):20米分辨率,对土壤湿度敏感(三)Sentinel-1 数据处理模块
Sentinel-1 是欧空局的合成孔径雷达(SAR)卫星,不受云、雨、光照影响,可全天候监测地物。代码重点处理IW 模式(干涉宽幅模式) 的双极化(VV/VH)数据,用于补充光学数据的不足(如多云地区监测)。
1. 数据筛选与升轨 / 降轨分离
// 1. 加载Sentinel-1地距影像(GRD:经过多视处理的存档数据,可直接使用)
var s1Collection = ee.ImageCollection('COPERNICUS/S1_GRD').filterDate('2020-10-25', '2020-12-31') // 时间范围:仅冬季(可能用于监测冬季作物/土壤冻结).filterBounds(region).filter(ee.Filter.eq('instrumentMode', 'IW')) // 模式筛选:IW模式(覆盖范围大,分辨率10米).filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) // 保留VV极化.filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VH')); // 保留VH极化// 2. 分离升轨(ASCENDING)与降轨(DESCENDING)数据
var s1Ascending = s1Collection.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING'));
var s1Descending = s1Collection.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING'));- 极化方式说明:
- VV(垂直发射 - 垂直接收):对地表粗糙度敏感(如裸地 VV 值高于植被);
- VH(垂直发射 - 水平接收):对植被结构敏感(如森林 VH 值高于农田);
- 升轨 / 降轨分离:由于 SAR 的 “侧视成像” 特性,同一地物在升轨 / 降轨影像中的散射特征可能不同,保留两种轨道数据可提高监测准确性。
2. 雷达数据合成与融合
// 1. 多时相中值合成(SAR数据去噪核心:减少雷达斑点噪声)
var s1AscMedian = s1Ascending.mean().clip(region);
var s1DescMedian = s1Descending.mean().clip(region);// 2. 条件融合:仅当升轨/降轨数据存在时,才添加到最终影像(避免空波段报错)
if(s1AscMedian.bandNames().length().getInfo() > 0) {indexImage = indexImage.addBands(s1AscMedian.select('VV').rename('ASC_VV')) // 升轨VV极化.addBands(s1AscMedian.select('VH').rename('ASC_VH')); // 升轨VH极化
}
if(s1DescMedian.bandNames().length().getInfo() > 0) {indexImage = indexImage.addBands(s1DescMedian.select('VV').rename('DESC_VV')) // 降轨VV极化.addBands(s1DescMedian.select('VH').rename('DESC_VH')); // 降轨VH极化
}- 技术细节:
getInfo():用于获取影像波段数量的 “客户端值”,判断数据是否存在(GEE 中大部分操作是 “服务器端延迟执行”,getInfo()可强制获取即时结果);- 雷达数据单位:Sentinel-1 GRD 数据的原始值是 “分贝(dB)”,范围通常为 [-30, 0],代码中后续可视化设置
min: -25, max: 0是基于该范围的合理调整。
(四)数据可视化模块
通过Map.addLayer()将关键数据在 GEE 地图上可视化,便于实时检查数据质量(如是否存在云干扰、裁剪是否正确),各可视化图层的配置逻辑如下:
1. Sentinel-2 相关可视化
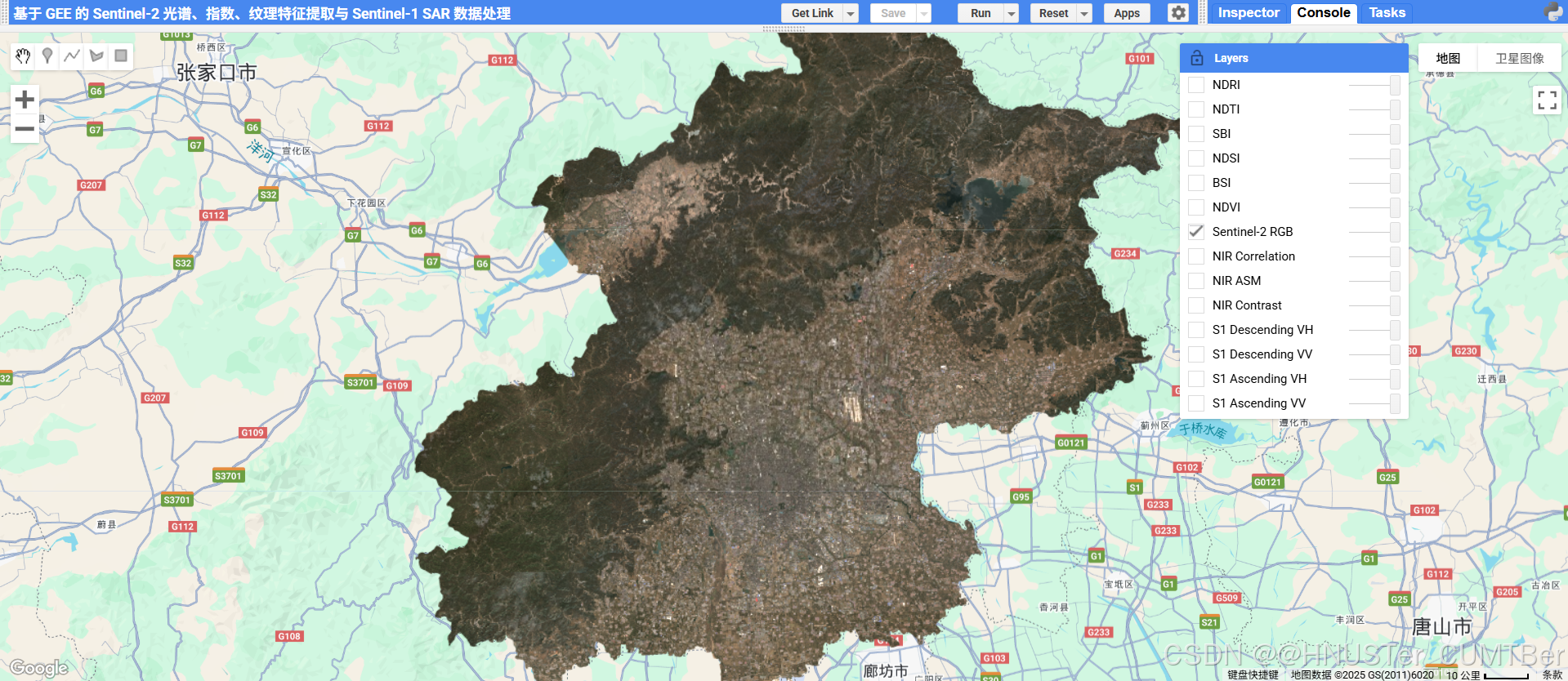
// 1. 真彩色合成(RGB):模拟人眼视觉,用于直观识别地物(如耕地、水体、建筑)
Map.addLayer(s2Median.clip(region), {bands: ['B4', 'B3', 'B2'], // 红(B4)、绿(B3)、蓝(B2)波段组合min: 0, max: 3000, // 反射率范围(Sentinel-2 SR数据的典型有效值)gamma: 1.2 // 伽马校正:增强图像对比度(1.2为常用值,避免过亮或过暗)
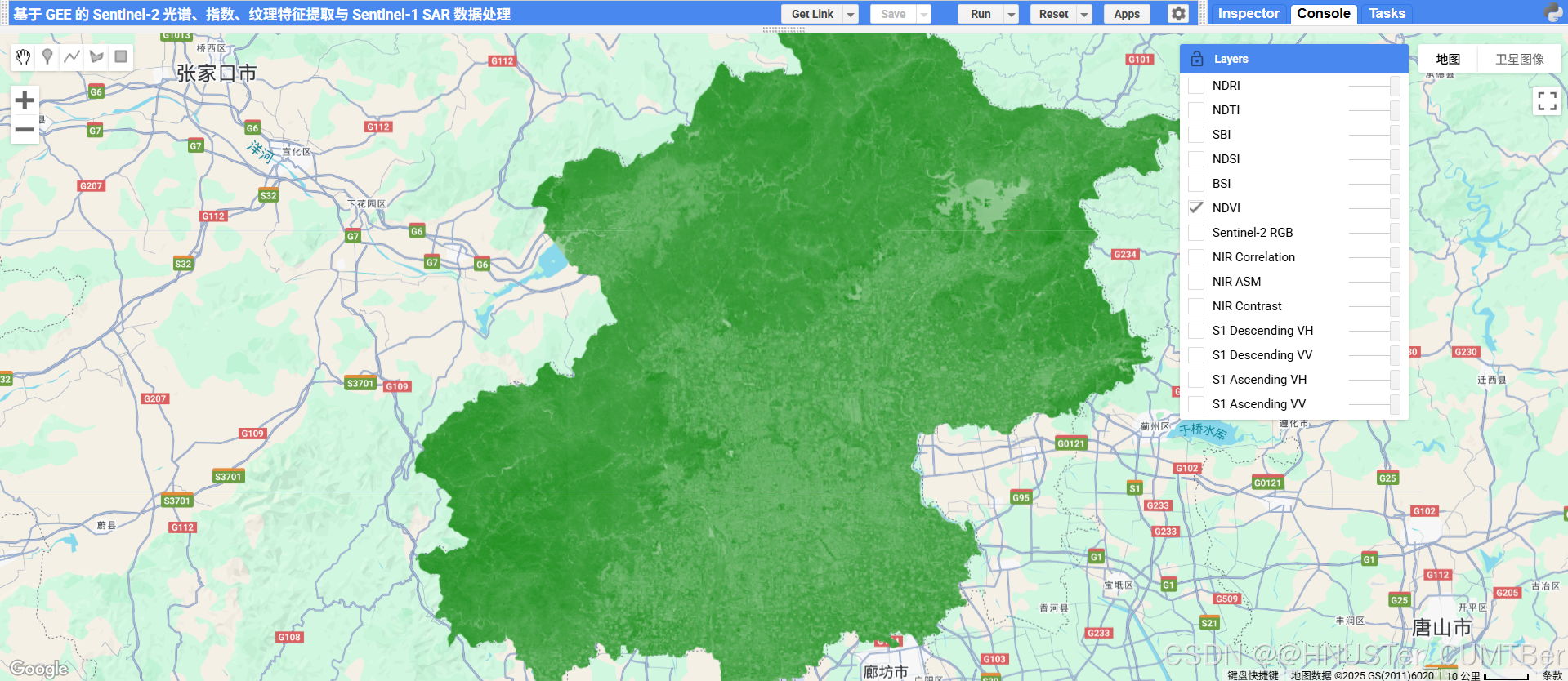
}, 'Sentinel-2 RGB');// 2. 植被指数可视化(以NDVI为例):绿色越深植被越茂盛
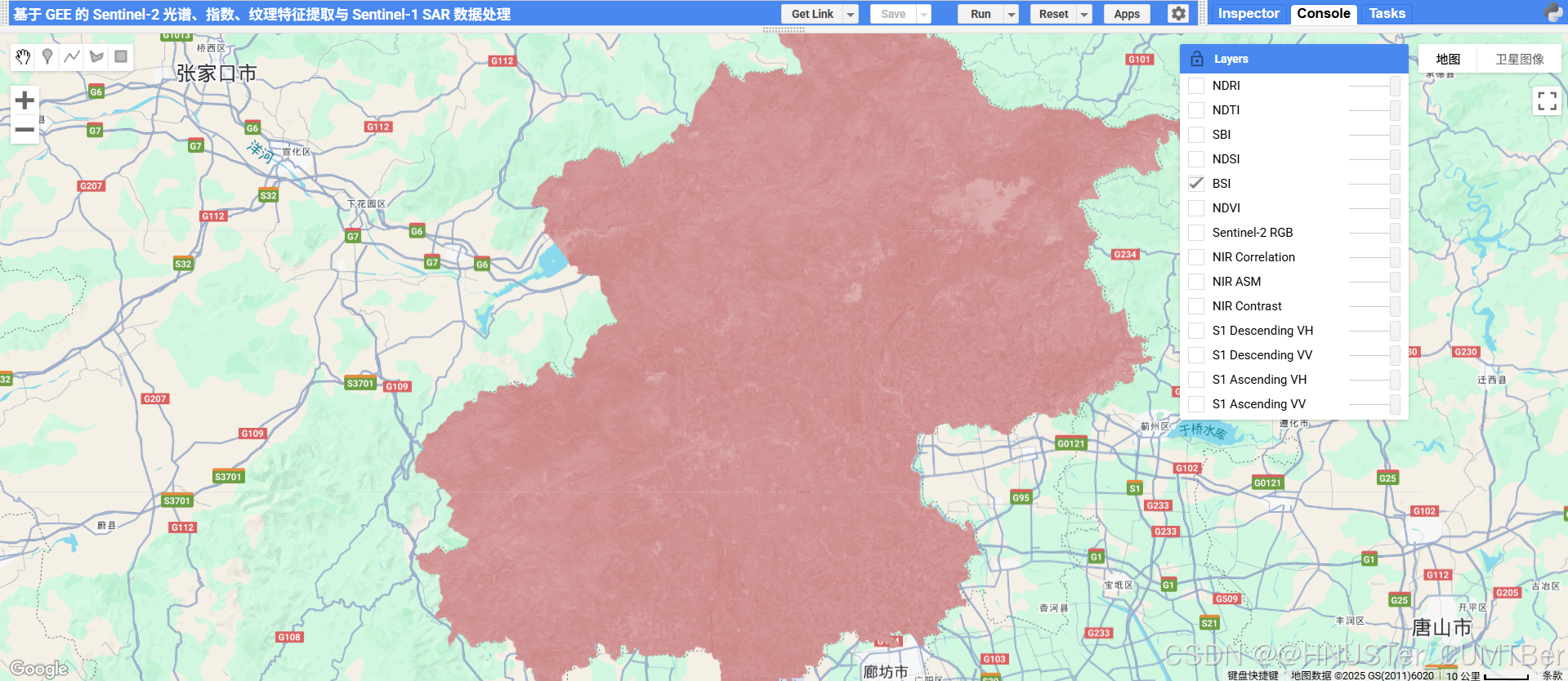
Map.addLayer(indices.NDVI.clip(region), {min: -1, max: 1, palette: ['white', 'green']}, 'NDVI');// 3. 土壤指数可视化(以BSI为例):棕色越深裸土比例越高
Map.addLayer(indices.BSI.clip(region), {min: -1, max: 1, palette: ['white', 'brown']}, 'BSI');2. Sentinel-1 相关可视化
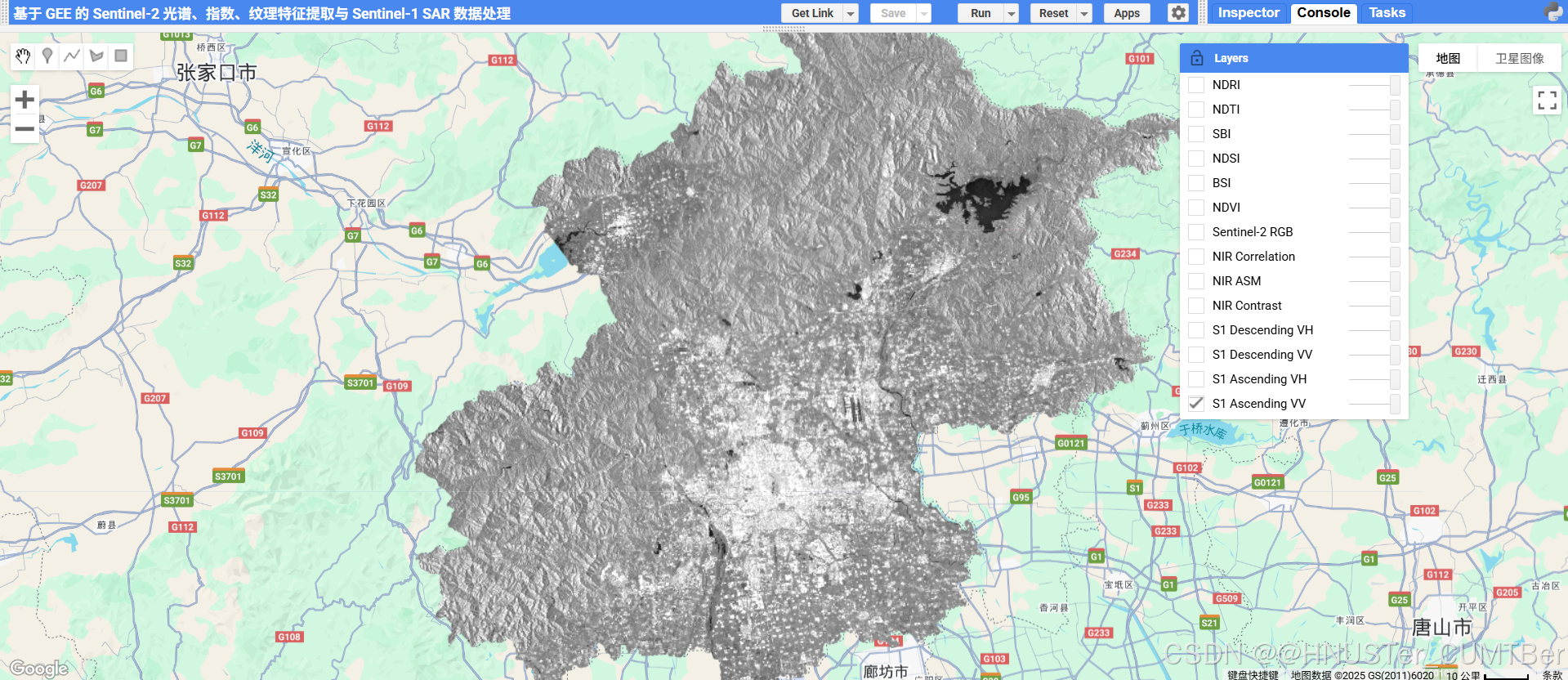
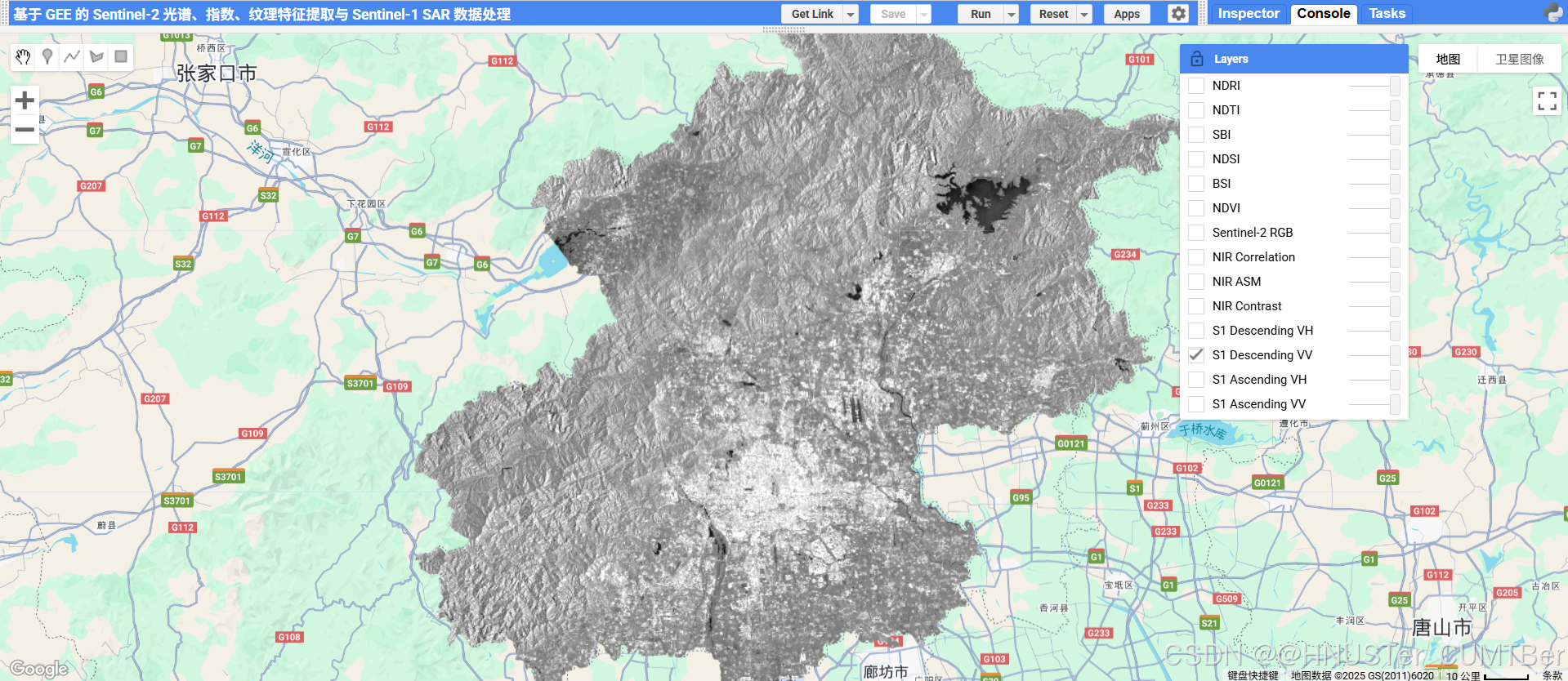
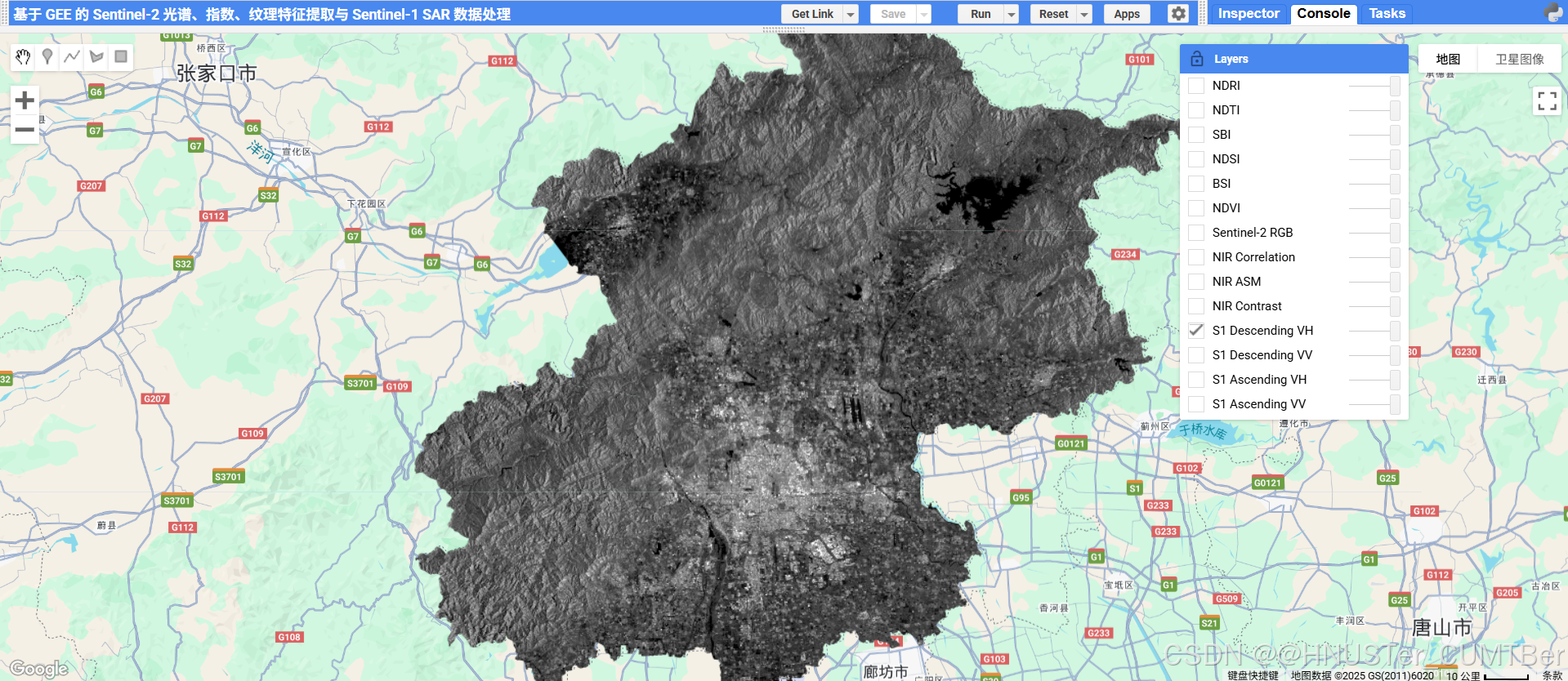
// 升轨VV极化可视化:值越高(越亮),地表后向散射越强(如建筑、裸地)
Map.addLayer(s1AscMedian, {bands: ['VV'], min: -25, max: 0}, 'S1 Ascending VV');
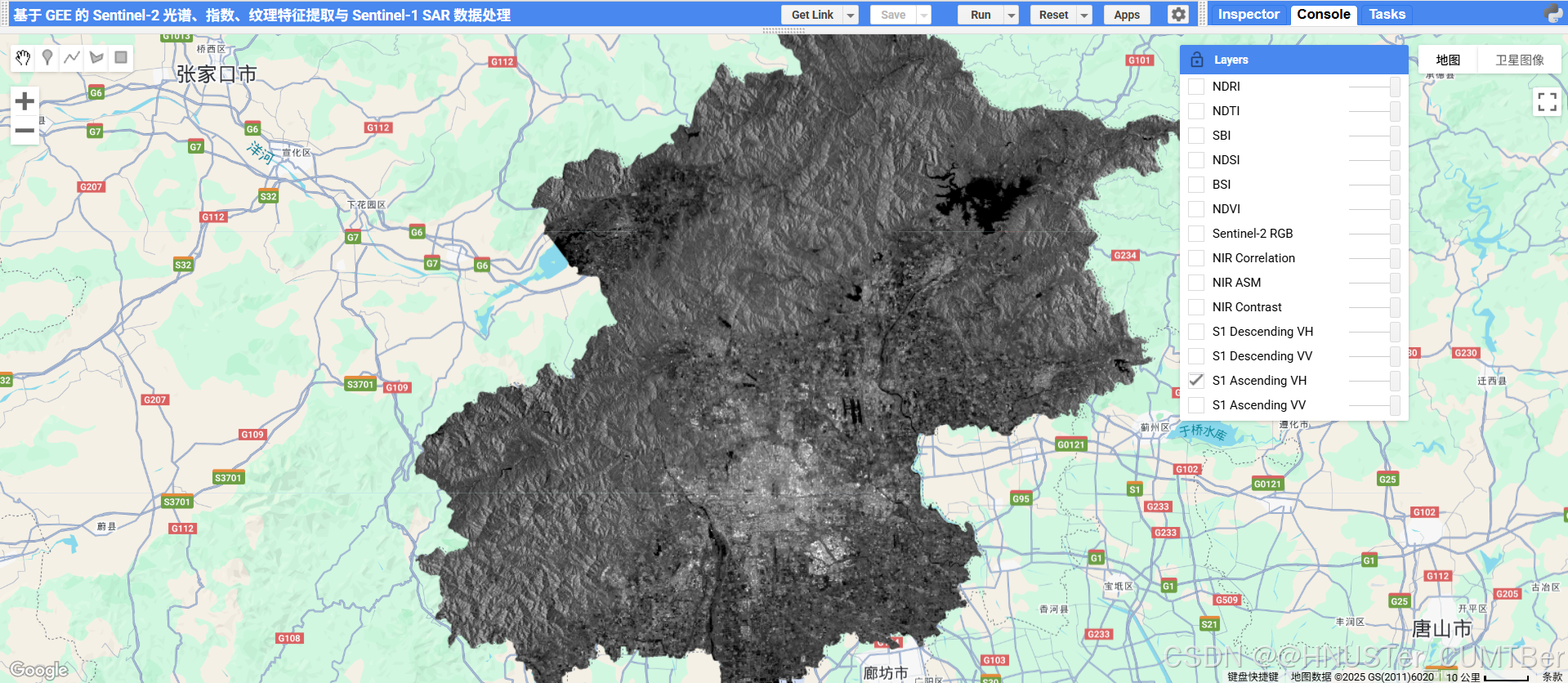
// 升轨VH极化可视化:植被区VH值通常低于VV值(表现为更暗)
Map.addLayer(s1AscMedian, {bands: ['VH'], min: -25, max: 0}, 'S1 Ascending VH');3. 纹理特征可视化
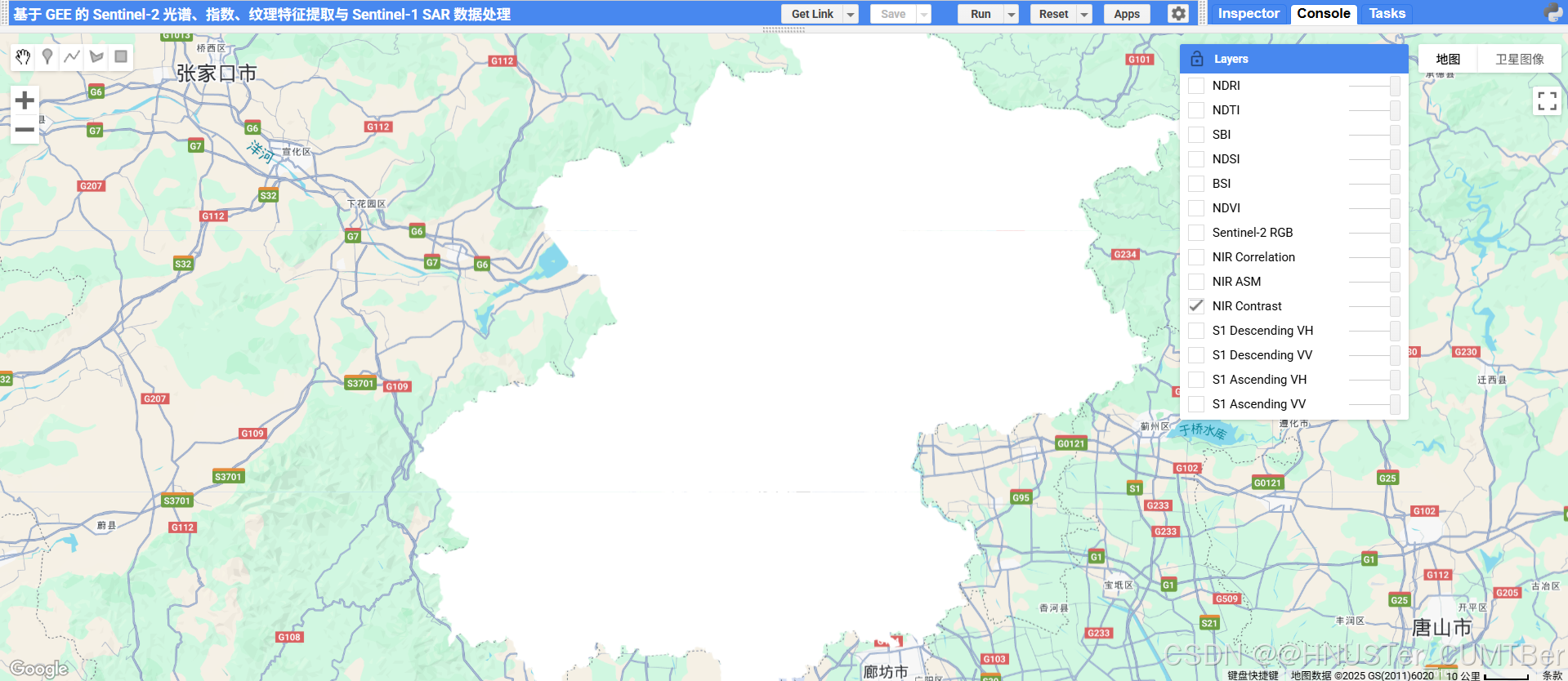
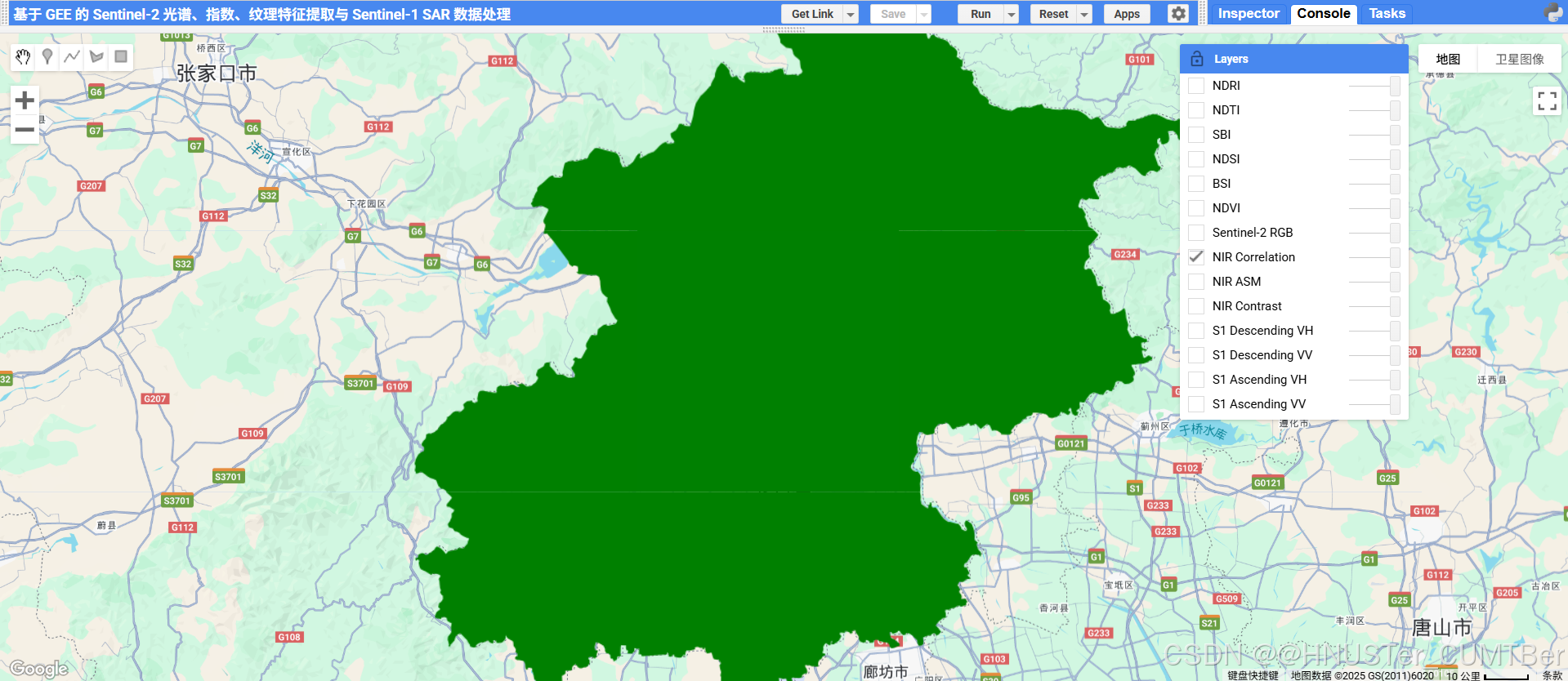
// 对比度(NIR_contrast):红色越深,纹理对比度越高(如道路边缘、建筑边界)
Map.addLayer(texture.NIR_contrast.toFloat().clip(region), {min: 0, max: 1000, palette: ['white', 'red']}, 'NIR Contrast');
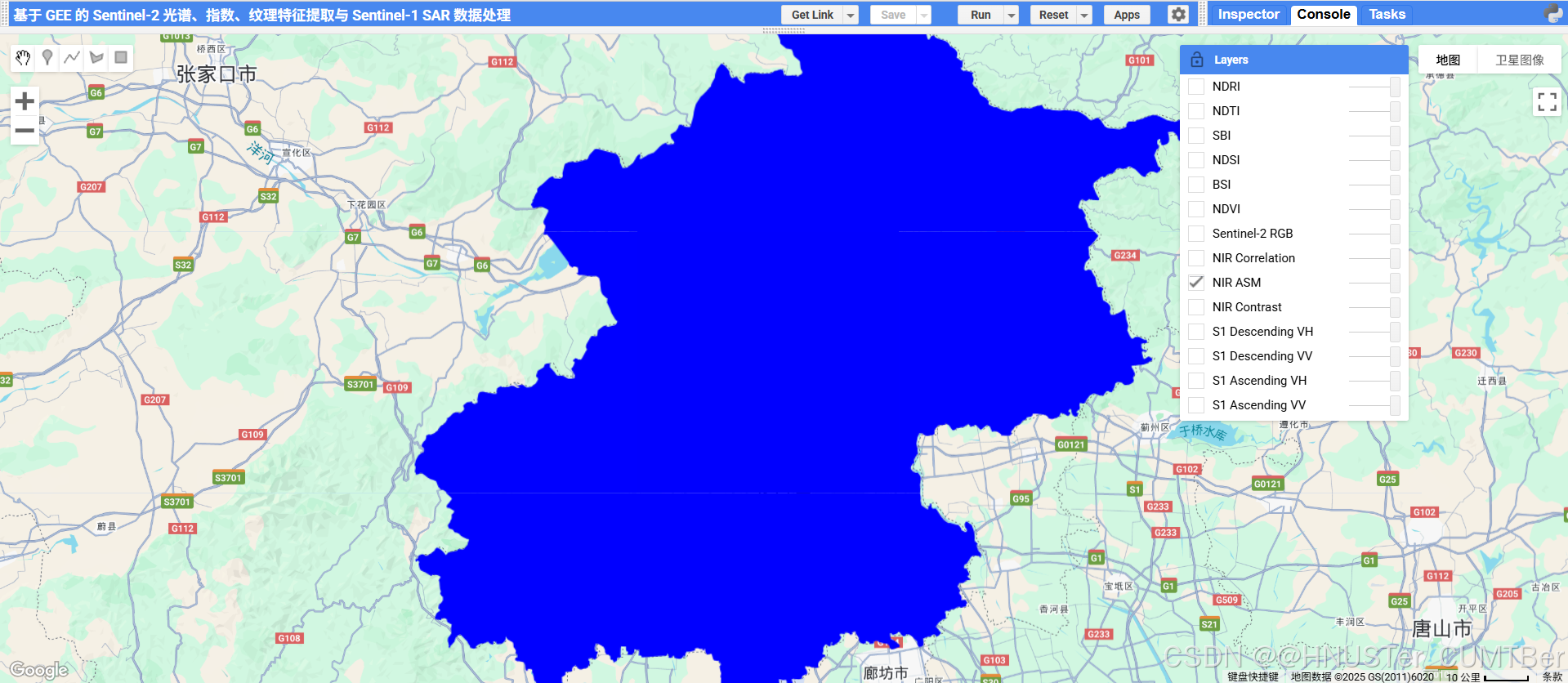
// 均匀性(NIR_asm):蓝色越深,纹理越均匀(如茂密森林、平整农田)
Map.addLayer(texture.NIR_asm.toFloat().clip(region), {min: 0, max: 1, palette: ['white', 'blue']}, 'NIR ASM');4. 地图中心设置
Map.centerObject(region, 9); // 自动将地图中心定位到研究区,缩放级别9(10米分辨率数据的合理缩放级)(五)数据导出模块
将融合后的多源数据导出为Cloud Optimized GeoTIFF(COG) 格式(云优化格式,支持云端高效读取,无需下载完整文件),导出参数配置如下:
Export.image.toDrive({image: indexImage, // 待导出的融合影像(包含所有波段/指数/纹理/雷达特征)description: 'Sentinel2_S1_2020_Indices_Texture', // 导出文件名称(清晰标识数据内容)folder: 'GEE_Export', // 导出到Google Drive的文件夹(需提前创建)scale: 10, // 空间分辨率:10米(与Sentinel-2核心波段一致)region: region.geometry(), // 导出范围:研究区矢量边界的几何对象maxPixels: 1e13, // 最大像素数:1e13(支持超大范围导出,避免像素超限报错)fileFormat: 'GeoTIFF', // 文件格式:GeoTIFF(遥感数据标准格式,支持GIS软件读取)formatOptions: {cloudOptimized: true // 启用COG格式:优化云端存储与访问效率}
});- 导出注意事项:
- Google Drive 存储空间:需确保 Drive 有足够空间(10 米分辨率、100km² 的区域,导出文件大小约为 100-200MB);
- 导出时间:数据量越大,导出时间越长(可在 GEE “Tasks” 面板查看进度)。
(六)信息打印模块
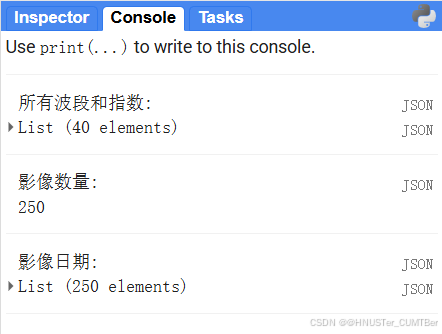
通过print()函数在 GEE 控制台输出关键信息,用于数据质量检查与日志记录:
// 1. 打印所有波段名称:确认融合后的数据包含所有预期特征(如光谱、指数、纹理、雷达)
print('所有波段和指数:', indexImage.bandNames());
// 2. 打印Sentinel-2影像数量:判断数据覆盖度(如全年云量<5%的影像数量是否足够)
print('影像数量:', s2Collection.size());
// 3. 打印Sentinel-2影像日期:确认影像时间分布是否均匀(避免集中在某一季节)
print('影像日期:', s2Collection.aggregate_array('system:time_start'));三、运行结果
四、代码关键技术要点与优化建议
(一)关键技术要点
- 多源数据协同:通过 “光学(Sentinel-2)+ 雷达(Sentinel-1)” 融合,弥补了光学数据受云干扰、雷达数据缺乏光谱信息的不足,提高了数据适用性;
- 去噪策略:Sentinel-2 用 “均值合成” 平滑季节波动,Sentinel-1 用 “均值合成” 减少斑点噪声,纹理特征用 “3×3 窗口 GLCM” 平衡细节与效率;
- 数据一致性:所有数据均通过
clip(region)裁剪至研究区,统一为 10 米分辨率、Float32 格式,确保后续分析(如机器学习分类)的兼容性。
(二)优化建议
- 时间范围细化:Sentinel-1 当前时间范围(2020.10.25-12.31)过短,可调整为与 Sentinel-2 一致的全年,避免季节不匹配;
- 云量筛选优化:对于多云地区,可放宽云量阈值(如 < 20%),并结合
cloudMask函数(基于 Sentinel-2 QA60 波段)进一步去除云像素,而非直接过滤整景影像; - 纹理窗口可选:可增加窗口大小参数(如 5×5、7×7),通过
print()对比不同窗口的纹理结果,选择最适合研究区地物的窗口; - 导出分块:若研究区范围超大(如 > 1000km²),可通过
ee.Geometry.split()将区域分块导出,避免单次导出时间过长。
五、代码应用场景
该代码生成的多源融合数据可直接用于以下遥感应用:
- 农业监测:利用 NDVI/EVI 监测作物生长周期,结合 S1 雷达数据监测作物倒伏;
- 土地利用分类:用 “光谱 + 指数 + 纹理 + 雷达” 特征训练机器学习模型(如随机森林),提高分类精度(如区分耕地与草地、建筑与裸地);
- 生态评估:用 BSI/NDTI 监测土壤侵蚀,用 NDVI/GNDVI 评估植被恢复情况;
- 灾害监测:Sentinel-1 数据可用于洪水、地震后的地表形变监测,Sentinel-2 数据可用于火灾后的植被损失评估。
若觉得代码对您的研究 / 项目有帮助,欢迎点击打赏支持!需要完整代码的朋友,打赏后可在后台私信(复制文章标题发给我),我会尽快发您完整可运行代码,感谢支持!